The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-10-12 04:33:27 -0500 | marked best answer | Merge two topics - get information of 2 different topics I'm simulating in Gazebo a control with noise. The model is ideal, so there's no noise. That's why I created a topic called Both topics are Twist, i.e, they have 3 linear velocities and 3 angular velocities. Now, I want to create a node that subscribes to both topics, add the velocities of each one and publish that information in another topic called I found that there's something called message_filters that could do this, but I couldn't make that work. Can anyone please help me, please? My idea is to have something like this: (I'm using Python) I tried something like this, using message filters: But I don't know a lot of things: 1) What information do I have to give to message_filters.Subscriber? I want to subscribe those 2 nodes (names: vel_control and vel_noise), and the "output" of those topics would be a Twist message: 3 velocities and 4 orientations. I don' know if 2) I don't know what do I have to put inside the callback For example, the vel_noise script is: |
| 2022-10-12 04:28:55 -0500 | marked best answer | Using this package with a different purpose [Land a quadcopter] I need to land my quadcopter on predefined tag. I’m using ARTags, so I know the position of the target when I see it with my camera. But I need to implement a better control, so I decided to use an Extended Kalman Filter (EKF) that uses the information of the camera but also from the gyroscope, magnetometer, etc. I found this package called tum_ardrone that does a SLAM and then the EKF. What I would need is to use the first two nodes (drone_stateestimation and maybe drone_autopilot), but I don’t want to use the drone_gui node because it needs the final position to be send by a joystick or keyboard, and I need that position to be the position or my tag. I mean, I want the final position to be read in a specific topic where I can store the position of ny tag (or maybe you have a better solution) |
| 2022-10-12 04:27:28 -0500 | received badge | ● Famous Question (source) |
| 2022-06-07 04:25:33 -0500 | received badge | ● Famous Question (source) |
| 2021-09-10 06:20:56 -0500 | received badge | ● Famous Question (source) |
| 2021-08-31 09:14:18 -0500 | received badge | ● Notable Question (source) |
| 2021-08-31 09:14:18 -0500 | received badge | ● Famous Question (source) |
| 2021-06-07 03:18:44 -0500 | received badge | ● Notable Question (source) |
| 2021-03-12 09:18:50 -0500 | received badge | ● Student (source) |
| 2021-03-12 09:18:15 -0500 | received badge | ● Famous Question (source) |
| 2021-03-12 09:18:15 -0500 | received badge | ● Notable Question (source) |
| 2020-12-18 13:38:51 -0500 | marked best answer | [SVO] Get pose for a long time I'm using the SVO package. I already calibrated my bottom camera (using the Pinhole model, with the specs of camera_calibration modified to be in the format expected) and modified my .launch file so it gets the images from the output of the image_proc (i.e, grayscale and rectified), but it's very difficult to obtain the pose of the camera over a long period of time. This is my .launch file: and this is how I use the image_proc package:
When I run |
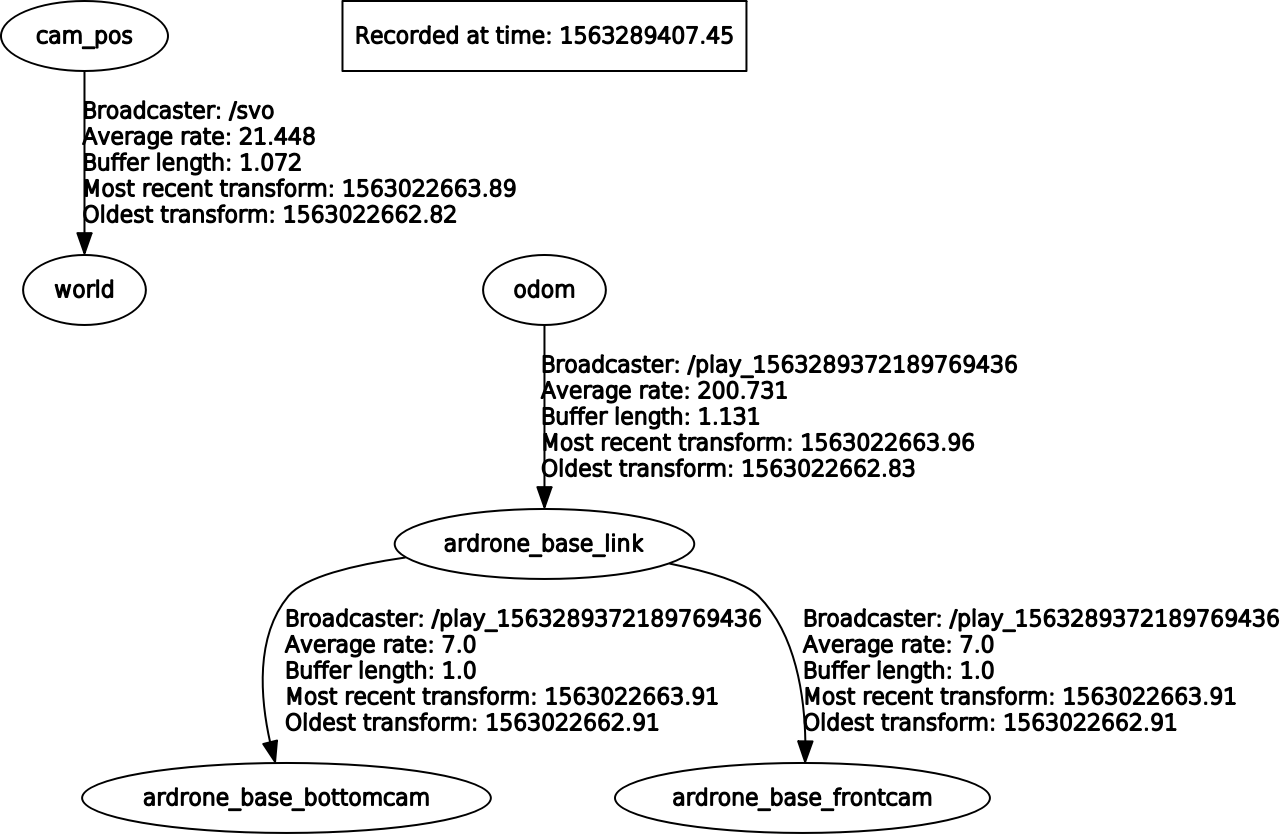
| 2020-12-18 13:32:41 -0500 | marked best answer | Create world frame I need to use the SVO package for Visual Odometry, so I need the world frame because it gives me the pose relative to that frame, but I'm not using it so I need to create it. This is a simplified tf_frame graph of my project:
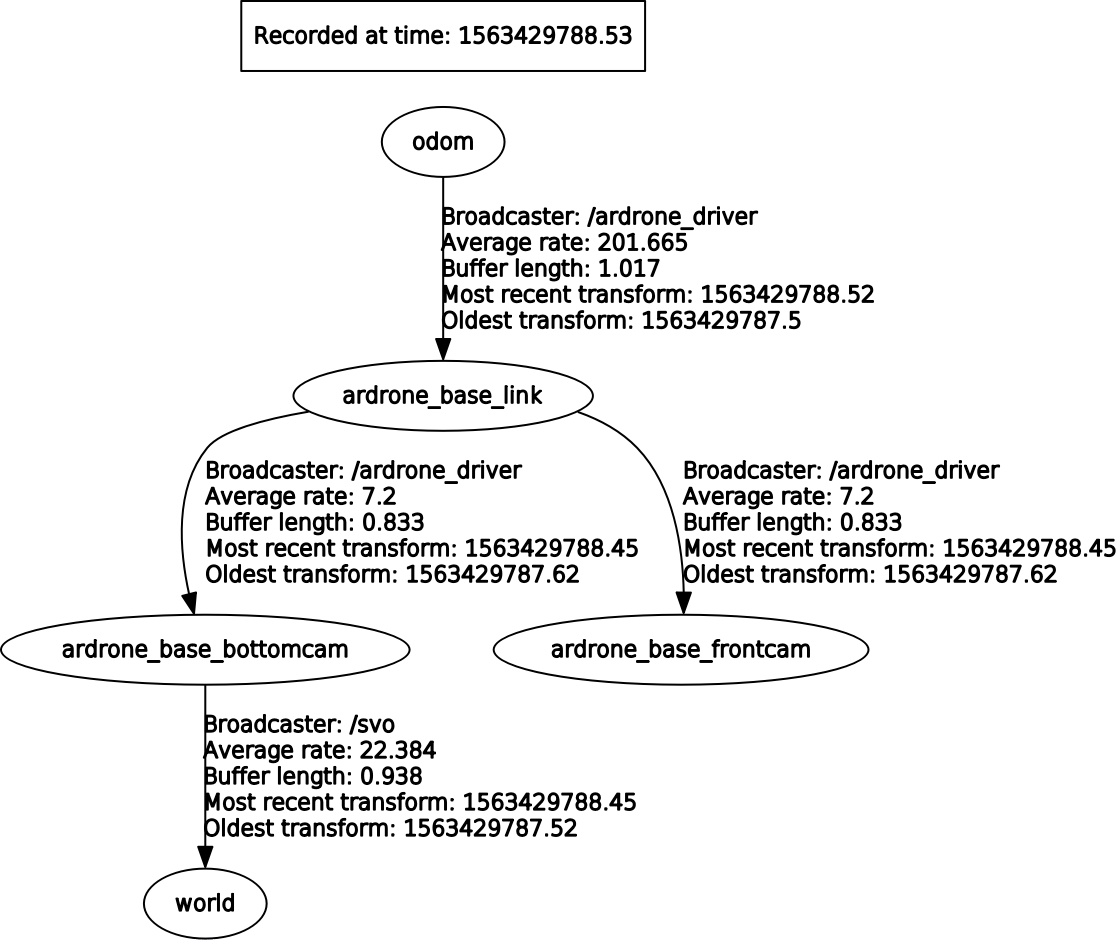
and I would like to create a broadcast between odom and world, or between any frame and world. What do you suggest? Edit: with the help of PeteBlackerThe3rd, now the rqt_tf_tree is:
|
| 2020-11-17 20:20:11 -0500 | received badge | ● Notable Question (source) |
| 2020-11-17 20:20:11 -0500 | received badge | ● Popular Question (source) |
| 2020-11-17 20:20:11 -0500 | received badge | ● Famous Question (source) |
| 2020-09-14 05:08:59 -0500 | received badge | ● Famous Question (source) |
| 2020-09-14 05:08:59 -0500 | received badge | ● Notable Question (source) |
| 2020-09-14 00:12:20 -0500 | received badge | ● Famous Question (source) |
| 2020-09-02 10:01:17 -0500 | received badge | ● Famous Question (source) |
| 2020-07-14 02:25:04 -0500 | received badge | ● Popular Question (source) |
| 2020-06-14 10:47:17 -0500 | received badge | ● Famous Question (source) |
| 2020-06-14 10:47:17 -0500 | received badge | ● Notable Question (source) |
| 2020-05-19 14:30:40 -0500 | received badge | ● Famous Question (source) |
| 2020-05-15 15:23:06 -0500 | commented question | From /cmd_vel to pwm signals of the thrusters @gvdhoorn can you please help me? |
| 2020-05-11 01:17:57 -0500 | edited question | Measurements of IMU (accelerometer and gyroscope) are drifted or with too much error Measurements of IMU (accelerometer and gyroscope) are drifted or with too much error I placed my drone on a table (i.e, |
| 2020-05-11 01:14:13 -0500 | asked a question | Measurements of IMU (accelerometer and gyroscope) are drifted or with too much error Measurements of IMU (accelerometer and gyroscope) are drifted or with too much error I placed my drone on a table (i.e, |
| 2020-04-09 06:04:00 -0500 | received badge | ● Famous Question (source) |
| 2020-04-05 13:18:32 -0500 | received badge | ● Notable Question (source) |
| 2020-02-25 12:32:09 -0500 | asked a question | Move nodes in rqt_graph Move nodes in rqt_graph I have to put a graph from rqt_graph in my Thesis, but it's width is too big and it's impossible |
| 2019-12-16 07:06:30 -0500 | received badge | ● Popular Question (source) |
| 2019-12-15 13:51:00 -0500 | commented question | From /cmd_vel to pwm signals of the thrusters Sorry, I thought it was the same for any vehicle. I edited the main post. Thanks |
| 2019-12-15 13:50:36 -0500 | edited question | From /cmd_vel to pwm signals of the thrusters From /cmd_vel to pwm signals of the thrusters Using the /cmd_vel topic I can send velocities to my quadcopter, but how i |
| 2019-12-15 12:50:12 -0500 | asked a question | From /cmd_vel to pwm signals of the thrusters From /cmd_vel to pwm signals of the thrusters Using the /cmd_vel topic I can send velocities to my quadcopter, but how i |
| 2019-12-08 02:08:40 -0500 | received badge | ● Famous Question (source) |
| 2019-11-01 15:37:49 -0500 | received badge | ● Popular Question (source) |
| 2019-11-01 15:37:49 -0500 | received badge | ● Notable Question (source) |
| 2019-10-30 15:42:11 -0500 | received badge | ● Famous Question (source) |
| 2019-10-16 03:56:48 -0500 | received badge | ● Notable Question (source) |
| 2019-10-02 12:14:37 -0500 | received badge | ● Popular Question (source) |
| 2019-09-27 06:05:36 -0500 | commented question | Camera calibrator for monocular camera with 320x240 resolution I have a setcamerainfo.h like this file but I don't know how the parameters height and width |
| 2019-09-25 02:51:47 -0500 | commented question | Camera calibrator for monocular camera with 320x240 resolution @Jari can you please help me? I really need to solve this |
| 2019-09-25 02:51:27 -0500 | received badge | ● Popular Question (source) |
| 2019-09-21 17:10:21 -0500 | commented question | Camera calibrator for monocular camera with 320x240 resolution I'm using the ardrone_autonomy. I have an AR Drone 2.0 and I'm using the bottom camera |
| 2019-09-21 10:02:21 -0500 | asked a question | Camera calibrator for monocular camera with 320x240 resolution Camera calibrator for monocular camera with 320x240 resolution I need to use the camera_calibration package for a camera |
| 2019-09-11 21:16:27 -0500 | received badge | ● Notable Question (source) |
| 2019-08-22 18:26:51 -0500 | commented question | Subscribe to 2 topics and store outputs (different frequencies?) that's what I did. The reference value is updated at 20 Hz and navdata at 200 Hz, and I send a new velocity at 200 Hz |
| 2019-08-22 16:57:08 -0500 | received badge | ● Notable Question (source) |
| 2019-08-22 16:46:02 -0500 | edited question | Subscribe to 2 topics and store outputs (different frequencies?) Subscribe to 2 topics and store outputs (different frequencies?) I have 2 topics: /vel_desired and /ardrone/navdata. The |
| 2019-08-22 16:45:10 -0500 | commented question | Subscribe to 2 topics and store outputs (different frequencies?) @usamamaq this is what I did and I think it works, but it doesn't print 10 message of the topic published at 200 Hz and |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.