The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-12-24 00:24:08 -0500 | received badge | ● Favorite Question (source) |
| 2021-07-19 01:01:51 -0500 | received badge | ● Great Question (source) |
| 2021-01-28 03:48:46 -0500 | received badge | ● Good Question (source) |
| 2020-02-12 05:38:35 -0500 | received badge | ● Nice Question (source) |
| 2019-11-18 00:29:27 -0500 | received badge | ● Nice Question (source) |
| 2019-11-18 00:29:17 -0500 | marked best answer | Steps-How to Start with Navigation Stack HelloI have a robot that is supposed to navigate autonomously, i decided to use the navigation stack in ROS. but i feel lost ! i do not know how to start with it. i already read its tutorials but i can not understand how to apply it to my robot. specifically the tutorial is not clear for me in the following points from the beginning how to write the tf for my robot is it only about base_link to base_laser ? and if my URDF is written, how to use it for tf ? ,, next thing i wrote the laser node, the IMU node, the GPS .. separately i did not get how to use them with navigation stack so i need clear steps to start with navigation stack please. |
| 2019-05-20 01:53:57 -0500 | marked best answer | How to choose a suitable navigation package Hello everybody, my project is an outdoor autonomous navigation mobile robot using ROS, the sensors used are Lidar, GPS, encoders and IMU i prepared the drivers for the sensors and actuators and each part is worked well separately with ROS, but now i want to connect and gather all the project so i am trying to find a suitable ROS package (providing autonomous navigation & SLAM), what are the main differences between the existed packages and what is the preferred package for outdoor navigation , "Any help and ideas are welcomed " |
| 2019-05-20 01:49:01 -0500 | marked best answer | What to do after installing Gmapping Hello, what is the next step after installing the Gmapping package from (GitHub) i install it in a workspace, my lidar is working with Rviz ,, what is next ? |
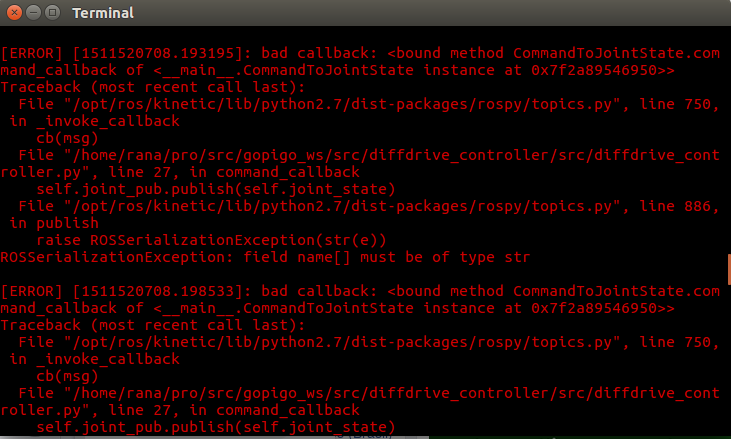
| 2019-05-20 01:44:03 -0500 | marked best answer | How to write my own joint state Hello all i have a real robot. using ROS. i have a problem with (Joint State Publisher) i understand that i should write my own (joint state publisher node). i read the related tutorials but i do not get how to convert encoders' messages to joint state message. i need steps or tutorial for doing that. thanks in advance. editi test the code in my code becomes as follows but i get error as in the image attached i am not familiar with python. all my codes are in C++ |
| 2018-07-19 08:15:36 -0500 | received badge | ● Famous Question (source) |
| 2018-06-04 13:36:39 -0500 | marked best answer | joint state publisher and robot state publisher What is the difference between |
| 2018-04-13 13:11:17 -0500 | received badge | ● Famous Question (source) |
| 2018-03-19 12:48:07 -0500 | received badge | ● Famous Question (source) |
| 2018-03-19 12:48:07 -0500 | received badge | ● Notable Question (source) |
| 2018-03-05 19:33:33 -0500 | received badge | ● Taxonomist |
| 2018-02-12 17:17:02 -0500 | received badge | ● Notable Question (source) |
| 2018-01-09 00:30:08 -0500 | received badge | ● Famous Question (source) |
| 2017-12-24 10:23:44 -0500 | commented question | map problems with gmapping @billy sorry for being late. would you mind to give me an idea how to do that? i did not do it ! |
| 2017-12-09 23:52:30 -0500 | commented question | map problems with gmapping @billy i answered by the lines of code. after each rotation the step count is reseted . isn't it enough as index? |
| 2017-12-09 03:34:55 -0500 | commented question | map problems with gmapping @billy hmmm actually i assumed the number of steps, because the datasheet standard number does not work. and for that it |
| 2017-12-09 01:23:38 -0500 | commented question | map problems with gmapping @billy i have these lines in arduino code is it what you mean by zero index? void stepmotor( void ) { digitalWrite( |
| 2017-12-09 01:23:05 -0500 | commented question | map problems with gmapping @billy i have these lines in arduino codem is it ehat you mean by zero index? void stepmotor( void ) { digitalWrite |
| 2017-12-09 01:22:00 -0500 | commented question | map problems with gmapping @billy i do not get how to replace data by fake one? |
| 2017-12-08 00:28:54 -0500 | commented question | map problems with gmapping @billy if i connect the lidar alone without rotation i get circles |
| 2017-12-06 00:43:08 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.