The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-02-22 16:17:53 -0500 | received badge | ● Famous Question (source) |
| 2019-12-08 22:59:05 -0500 | received badge | ● Nice Answer (source) |
| 2019-07-15 12:08:28 -0500 | received badge | ● Famous Question (source) |
| 2019-07-15 12:08:28 -0500 | received badge | ● Notable Question (source) |
| 2019-04-08 01:09:09 -0500 | marked best answer | how to aggregate several PointCloud2 messages into one? After converting my RPLIDAR's laser messages to PointCloud2 form (using hector_laser_to_pointcloud) I can visualize them in RVIZ and when doing rostopic echo I can see the messages coming through. How can I assemble the scans so I could get a collective cloud as I move my lidar around? I have my transforms set up and everything, thing is I am not sure as to how I can do this. Is there a package to do this? |
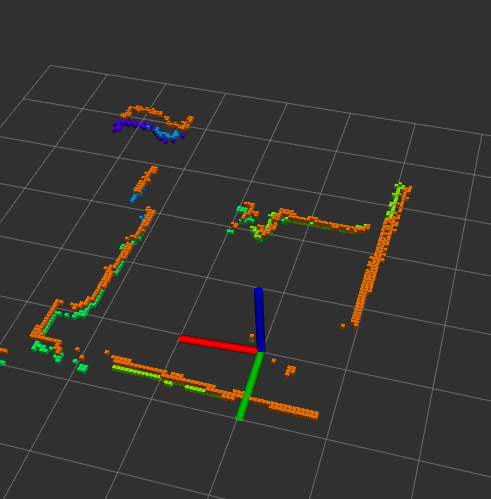
| 2019-04-08 01:06:16 -0500 | marked best answer | cannot transform laser using laser_assembler I've successfully used laser_assembler to convert laser scans to pointclouds. However, when viewing the concatenated clouds in rviz they are not de-rotated (projected) accordingly with the fixed frame I've chosen. Pictures: initially (laser is started):
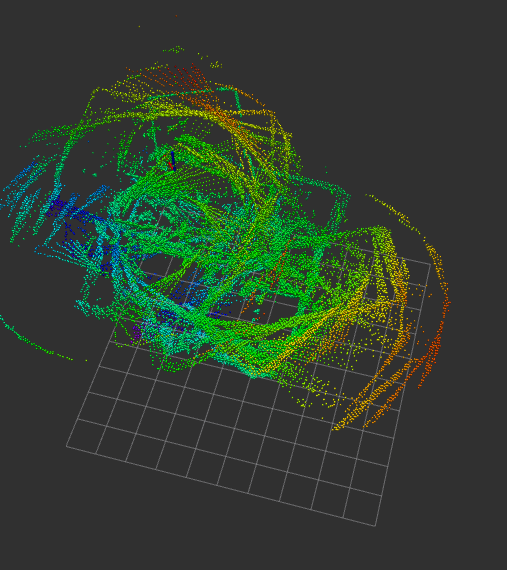
After moving the LiDAR around:
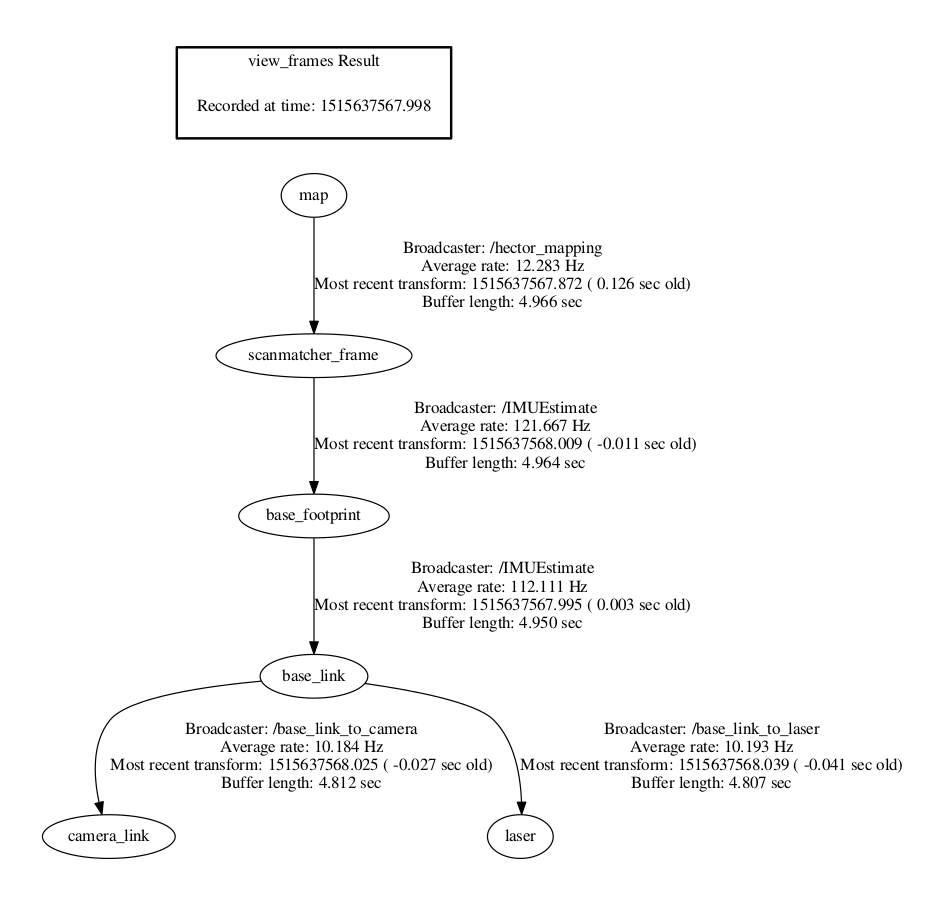
Even though octomap progresses correctly in terms of absolute position (x,y,z), it strikes out when it comes to the angles. Launch file: I've tried every possible combination of fixed_frame and frame_id for laser_assembler and octomap respectively, but the result is always the same, either I get a 2D or a 3D octomap that gets rotated by the laser's unprojected frame. I've even pulled in pcl_ros and modified the periodic_snapshotter to transform the resulting pointcloud but no cigar. Here is the code for your review. I tried all combinations possible for the transforms so it's nothing about that (the rest of periodict_snapshotter.cpp is the same): Any ideas? I feel like I'm super closed but I just don't know what's going on. UPDATE, here is my tf tree:
|
| 2019-03-01 14:27:27 -0500 | received badge | ● Notable Question (source) |
| 2018-06-26 02:38:13 -0500 | marked best answer | Problem with data from subscriber not going anywhere Related question: https://answers.ros.org/question/2781... In my code there are two subscriber functions. I want to pass the shared pointer data to other data defined in my file. My code is below: I'm so lost... When excluding any operations with the vectors doing ROS_INFO inside the subscriber functions shows that they do indeed get the data too. I made this code as simple as it can be and it's still not working. I have a feeling it's a problem with the vectors not being passed the values in the right order and I tried that but nothing works. Please, any help would be massively appreciated |
| 2018-04-24 12:22:30 -0500 | received badge | ● Famous Question (source) |
| 2018-01-12 22:53:02 -0500 | commented answer | cannot transform laser using laser_assembler Ah, I guess it's just not possible with an integrated IMU. Thank you for sticking out for me, I appreciate it :) |
| 2018-01-12 22:50:47 -0500 | received badge | ● Notable Question (source) |
| 2018-01-12 01:21:47 -0500 | commented question | cannot transform laser using laser_assembler I feel like the community could have a use for this , but if you don't know it's ok, I'll probably just try something el |
| 2018-01-12 01:20:45 -0500 | commented question | cannot transform laser using laser_assembler Yup, the laser is not moving w.r.t the base_link, and I am moving the robot around. Base_footprint is fixed w.r.t to bas |
| 2018-01-12 00:49:51 -0500 | received badge | ● Popular Question (source) |
| 2018-01-11 21:06:21 -0500 | received badge | ● Famous Question (source) |
| 2018-01-11 12:57:38 -0500 | edited question | cannot transform laser using laser_assembler cannot transform laser using laser_assembler I've successfully used laser_assembler to convert laser scans to pointcloud |
| 2018-01-11 12:57:38 -0500 | received badge | ● Editor (source) |
| 2018-01-11 11:43:47 -0500 | commented question | cannot transform laser using laser_assembler Yes, I have a static tf publisher from base link to laser. I’ll post the tf tree in a bit so you could take a look for y |
| 2018-01-11 01:28:19 -0500 | commented answer | How do I get the transformed point cloud from in callback? I'm not getting a rotated cloud in my CB Hey! Can you share what you have done to transform the PCL correctly? I'm modifying the periodic_snapshotter node from l |
| 2018-01-10 21:43:26 -0500 | asked a question | cannot transform laser using laser_assembler cannot transform laser using laser_assembler I've successfully used laser_assembler to convert laser scans to pointcloud |
| 2018-01-08 01:33:26 -0500 | received badge | ● Nice Question (source) |
| 2018-01-08 01:33:22 -0500 | received badge | ● Self-Learner (source) |
| 2018-01-08 01:33:22 -0500 | received badge | ● Teacher (source) |
| 2018-01-07 20:29:29 -0500 | answered a question | how to aggregate several PointCloud2 messages into one? I ended up using octomap_server for aggregating the pointcloud messages and used the frame_id as map. I converted laser_ |
| 2018-01-07 20:26:02 -0500 | commented answer | how to aggregate several PointCloud2 messages into one? Thanks! I already looked at laser assembler but found it easier to use hector_laserscan_to_pointcloud since it generated |
| 2018-01-07 17:12:11 -0500 | received badge | ● Notable Question (source) |
| 2018-01-07 16:13:38 -0500 | received badge | ● Student (source) |
| 2018-01-07 12:36:22 -0500 | received badge | ● Popular Question (source) |
| 2018-01-07 05:27:58 -0500 | asked a question | how to aggregate several PointCloud2 messages into one? how to aggregate several PointCloud2 messages into one? After converting my RPLIDAR's laser messages to PointCloud2 form |
| 2018-01-07 05:08:10 -0500 | edited question | Is my PointCloud2 message broken? Is my PointCloud2 message broken? Maybe I'm just being a noob in ROS, but after converting my RPLIDAR's laser messages t |
| 2018-01-07 05:02:31 -0500 | received badge | ● Notable Question (source) |
| 2018-01-07 05:02:14 -0500 | asked a question | Is my PointCloud2 message broken? Is my PointCloud2 message broken? Maybe I'm just being a noob in ROS, but after converting my RPLIDAR's laser messages t |
| 2017-12-27 11:14:34 -0500 | received badge | ● Popular Question (source) |
| 2017-12-27 11:13:26 -0500 | received badge | ● Popular Question (source) |
| 2017-12-27 08:15:13 -0500 | commented answer | Problem with data from subscriber not going anywhere Excellent advice. I actually just ended up solving the problem using arrays instead of vectors, but you certainly have m |
| 2017-12-27 08:13:39 -0500 | received badge | ● Supporter (source) |
| 2017-12-27 04:55:33 -0500 | asked a question | Problem with data from subscriber not going anywhere Problem with data from subscriber not going anywhere Related question: https://answers.ros.org/question/278181/issues-wi |
| 2017-12-27 03:19:57 -0500 | received badge | ● Enthusiast |
| 2017-12-26 13:53:20 -0500 | commented question | Issues with seg-faults and node not publishing anything There is no error with the code, the node just isn’t publishing or subscribing to anything. I managed to get the topics |
| 2017-12-26 04:47:44 -0500 | received badge | ● Popular Question (source) |
| 2017-12-26 04:09:08 -0500 | asked a question | Issues with seg-faults and node not publishing anything Issues with seg-faults and node not publishing anything I hate asking about seg-fault but it's just part of the story. B |
| 2017-09-08 10:39:14 -0500 | commented question | SSH ROS package on host computer off of USB connection Yup that's me, but no one answered so I kept trying different methods to make it work. I think I might post in the openc |
| 2017-09-08 05:07:26 -0500 | asked a question | SSH ROS package on host computer off of USB connection SSH ROS package on host computer off of USB connection Hey, sorry if I worded the question weirdly. I have a Jetson TK1 |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.