The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-10-01 01:12:54 -0500 | received badge | ● Nice Answer (source) |
| 2018-04-20 14:34:49 -0500 | received badge | ● Favorite Question (source) |
| 2016-01-16 22:50:56 -0500 | commented question | SiftGPU cannot be compiled Your issue seems to match the one in this answer: rgbdslam-v2-catkin_make-error |
| 2015-12-13 06:17:14 -0500 | commented question | how can i install camera1394 package? I don't think the Camera1394 package is the one you are after - it is used for Firewire connected cameras. I expect that you would need two instances of a USB camera driver such as libuvc_camera |
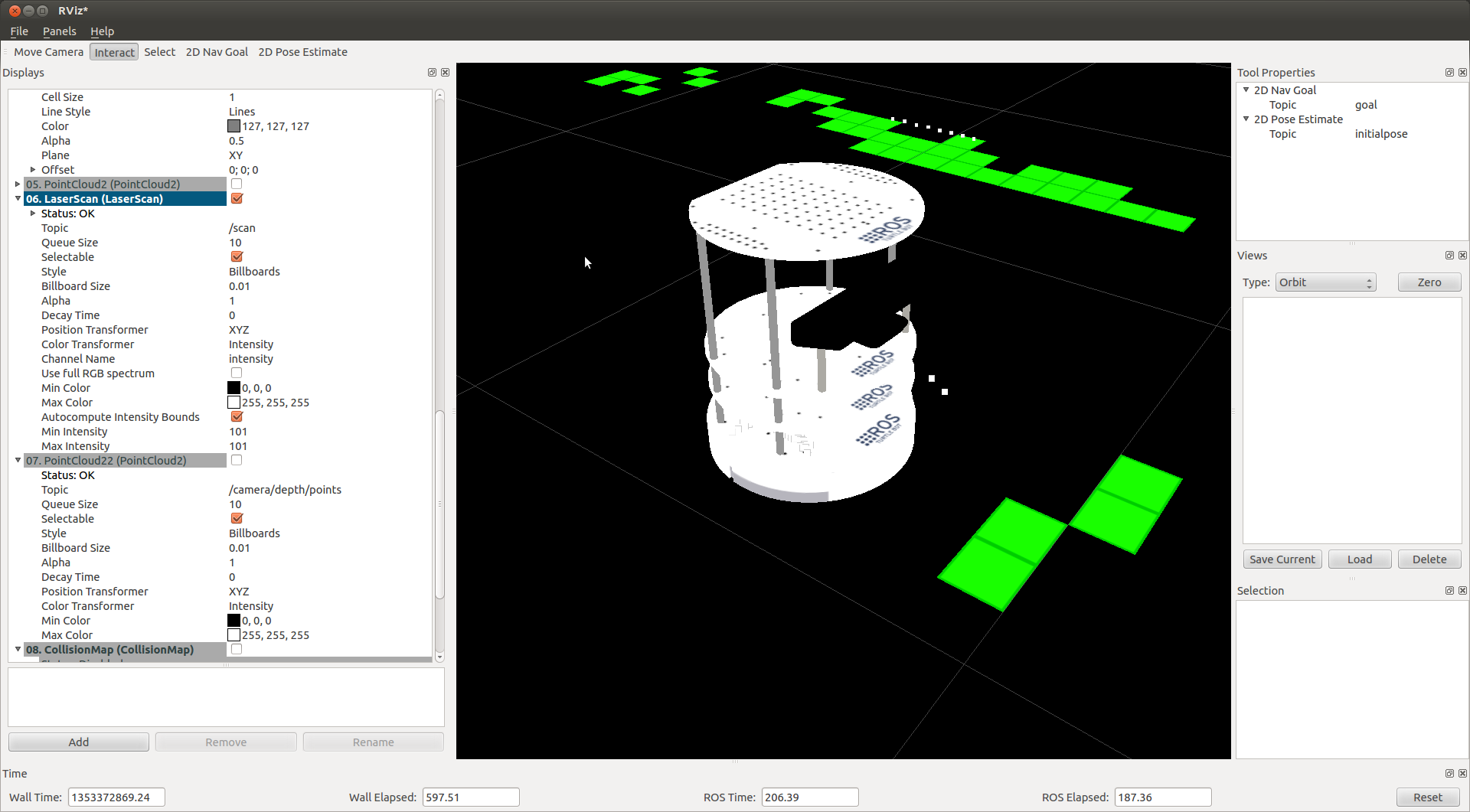
| 2015-07-08 02:02:44 -0500 | marked best answer | Turltebot laser striking frame in gazebo simulation I'm currently experimenting with navigation for a simulated turtlebot using the turtlebot_navigation package. I was having trouble getting a stable position estimate when I noticed that the simulated LIDAR appears to be striking the frame of the robot which appears to be interefering with the pose estimate generated by the amcl package. I have modified the minimum range of the laser to 0.3m, but this does seem to be a temporary solution. Should the simulated sensor be moved so that is does not strike the frame, or is there a method for directing the navigation system to ignore LIDAR returns that do not meet specific criteria?
|
| 2015-06-29 02:14:31 -0500 | received badge | ● Famous Question (source) |
| 2015-03-20 12:57:55 -0500 | received badge | ● Famous Question (source) |
| 2015-03-20 12:57:55 -0500 | received badge | ● Notable Question (source) |
| 2015-03-20 12:57:55 -0500 | received badge | ● Popular Question (source) |
| 2014-11-27 05:03:02 -0500 | received badge | ● Great Question (source) |
| 2014-07-19 22:29:03 -0500 | commented answer | Groovy/Hydro on ubuntu 14.04? according to this page the 12.04.5 release has the kernel from 14.04.1 (https://wiki.ubuntu.com/Kernel/LTSEnablementStack). would this provide the required drivers? |
| 2014-07-07 06:19:32 -0500 | received badge | ● Citizen Patrol (source) |
| 2014-01-28 17:28:12 -0500 | marked best answer | debugging shaders on Gazebo I'm experimenting with using programmable shaders for materials in Gazebo. GLSL type shaders seem to work well, but I find that a programming error will only result in a white object with no corresponding error logged to standard output. Is there any way for me to locate coding errors in shader programs? |
| 2014-01-28 17:25:15 -0500 | marked best answer | Rate limiting in Gazebo 1.0 I have been using earlier releases of gazebo with some success. I'm currently experimenting with the 1.0 -RC3 version of gazebo to be included with fuerte, but I'm having trouble with rate limiting. In the earlier versions placing the should limit the frame rate. Despite experimenting with the values my rather simple simulation is still running at many times real time. Any suggestions? |
| 2014-01-28 17:23:05 -0500 | marked best answer | gazebo crash on startup I have just installed electric on ubuntu oneiric. I'm finding that gazebo crashes on startup. console output: :~$ rosrun gazebo gazebo /opt/ros/electric/stacks/simulator_gazebo/gazebo_worlds/worlds/simple.world Gazebo multi-robot simulator, version 0.10.0 Part of the Player/Stage Project [http://playerstage.sourceforge.net]. Copyright (C) 2003 Nate Koenig, Andrew Howard, and contributors. Released under the GNU General Public License. Unsupported shadows type: "stencilAdditive". Supported types are "stencil" and "texture". Not rendering shadows. directory [/tmp/gazebo-jonathan-0] already exists (previous crash?) the owner gazebo server (pid=27478) is not running. deleting the old information of the directory [/tmp/gazebo-jonathan-0] terminate called after throwing an instance of 'std::string' Aborted (core dumped) Backtrace: warning: Can't read pathname for load map: Input/output error. [Thread debugging using libthread_db enabled] Core was generated by `/opt/ros/electric/stacks/simulator_gazebo/gazebo/bin/gazebo /opt/ros/electric/s'. Program terminated with signal 6, Aborted. #0 0x00007ff6ec6f43a5 in raise () from /lib/x86_64-linux-gnu/libc.so.6 (gdb) bt #0 0x00007ff6ec6f43a5 in raise () from /lib/x86_64-linux-gnu/libc.so.6 #1 0x00007ff6ec6f7b0b in abort () from /lib/x86_64-linux-gnu/libc.so.6 #2 0x00007ff6ecfb2d7d in __gnu_cxx::__verbose_terminate_handler() () from /usr/lib/x86_64-linux-gnu/libstdc++.so.6 #3 0x00007ff6ecfb0f26 in ?? () from /usr/lib/x86_64-linux-gnu/libstdc++.so.6 #4 0x00007ff6ecfb0f53 in std::terminate() () from /usr/lib/x86_64-linux-gnu/libstdc++.so.6 #5 0x00007ff6ecfb104e in __cxa_throw () from /usr/lib/x86_64-linux-gnu/libstdc++.so.6 #6 0x00007ff6eb35ba7f in libgazebo::IfaceFactory::NewIface(std::string const&) () from /opt/ros/electric/stacks/simulator_gazebo/gazebo/gazebo/lib/libgazebo.so.0.10.0 #7 0x00007ff6edba94d2 in gazebo::Factory::Factory() () from /opt/ros/electric/stacks/simulator_gazebo/gazebo/gazebo/lib/libgazebo_server.so.0.10.0 #8 0x00007ff6edb7f4e2 in gazebo::World::Load(gazebo::XMLConfigNode*, int) () from /opt/ros/electric/stacks/simulator_gazebo/gazebo/gazebo/lib/libgazebo_server.so.0.10.0 #9 0x00007ff6edba4b80 in gazebo::Simulator::Load(gazebo::XMLConfig*, int) () from /opt/ros/electric/stacks/simulator_gazebo/gazebo/gazebo/lib/libgazebo_server.so.0.10.0 #10 0x00007ff6edba5982 in gazebo::Simulator::LoadWorldFile(std::string const&, int) () from /opt/ros/electric/stacks/simulator_gazebo/gazebo/gazebo/lib/libgazebo_server.so.0.10.0 #11 0x0000000000464c0b in ?? () #12 0x00007fff48ad3fd8 in ?? () #13 0x0000000000000000 in ?? () |
| 2014-01-28 17:22:13 -0500 | marked best answer | heightmap for gazebo I'm experimenting with using a heightmap in gazebo to produce some nice rolling terrain. So far I have found that it works wonderfully until I add a LIDAR sensor. When I add such a sensor to the robot I find that the simulation runs smoothly until an object enters the robots field of view. Adding any such object slows down the sim almost to a standstill. I read the answer about improving performance in Gazebo adn tried improving the speed by reducing the number of LIDAR rays to 10 and chopping back the physics rate to 100Hz. With these changes the simulation runs at about 1/5th normal speed. Is there any way of making the heightmap geom more gazebo friendly? failing that is it possible to import mesh based terrain? I have found at least one project that used both heightmaps and LIDAR under gazebo |
| 2014-01-28 17:22:03 -0500 | marked best answer | decimation of image streams? I have been doing some experimentation with image processing, but I am finding that I am constrained by the available CPU resources. Is there some method for dropping images from a stream to lower the CPU load? |
| 2013-12-22 20:30:56 -0500 | commented question | p3dx not communicating perfectly with laptop Are you connecting via WiFi to a host computer on the robot? I have seen a similar problem where hostfile entries do not match IP addresses. |
| 2013-10-07 00:36:41 -0500 | answered a question | opencv in makefile Looks like it is failing to find the libraries when linking. Examination of the wiki entry for the vision_opencv package shows that you also need to add the variable "${OpenCV_LIBRARIES}" to the target_link_libraries entry. A little experimentation seems to show that changing your link command to the following fixes your problem: target_link_libraries(listener ${catkin_LIBRARIES} ${OpenCV_LIBRARIES}) |
| 2013-09-03 22:48:48 -0500 | commented question | Different color for each cube in CUBE_LIST using std_msgs/ColorRGBA[] Since i is in the range of zero to nine, could the value you are setting in the red channel be rounding down to zero? |
| 2013-07-01 16:36:07 -0500 | commented question | artifacts when visualizing mesh with librviz That looks like a type of z fighting ( http://en.wikipedia.org/wiki/Z-fighting ). I'm wondering if the model you downloaded includes multiple coincident meshes for level of detail or special effects. |
| 2013-05-23 21:50:09 -0500 | received badge | ● Notable Question (source) |
| 2013-04-19 09:25:27 -0500 | marked best answer | what realtime patch should I use with ROS? ROS and Orocos are both capable of running realtime priority threads. What Realtime patch is the preferred method for realtime under Ubuntu? Userspace support for RTAI and Xenomai are both available in repos, but there does not seem to be corresponding kernels available. I would prefer to use a prebuilt kernel if possible to simplify repeatability. |
| 2013-03-15 02:27:46 -0500 | received badge | ● Popular Question (source) |
| 2013-02-03 07:34:25 -0500 | received badge | ● Famous Question (source) |
| 2013-01-20 16:27:03 -0500 | received badge | ● Notable Question (source) |
| 2013-01-20 16:27:03 -0500 | received badge | ● Famous Question (source) |
| 2013-01-14 22:18:12 -0500 | received badge | ● Great Question (source) |
| 2013-01-12 04:54:22 -0500 | answered a question | Gyroscope for DIY turtlebot |
| 2013-01-10 18:51:29 -0500 | received badge | ● Popular Question (source) |
| 2013-01-10 18:51:29 -0500 | received badge | ● Notable Question (source) |
| 2013-01-10 18:51:29 -0500 | received badge | ● Famous Question (source) |
| 2013-01-08 19:16:48 -0500 | received badge | ● Nice Answer (source) |
| 2013-01-08 13:54:27 -0500 | commented question | Are Darpa Robotic Challenge Simulator and DRC-based Gazebo a part of ROS Fuerte? There is a question on the gazebosim site that seems to be similar. I would suggest taking a look at it here: http://answers.gazebosim.org/question/246/drcsim-which-ros-versions-will-be-supported/ |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.