The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-09-20 09:14:46 -0500 | received badge | ● Famous Question (source) |
| 2021-10-28 14:21:10 -0500 | commented answer | start and kill rosbag record from bash shell script rosnode kill /my_bag This assures that rosbag stops gracefully. That does not seem to stop gracefully though. Ros |
| 2021-08-16 04:39:23 -0500 | received badge | ● Notable Question (source) |
| 2021-06-29 08:22:37 -0500 | received badge | ● Nice Question (source) |
| 2021-04-28 04:56:09 -0500 | received badge | ● Popular Question (source) |
| 2021-04-26 16:28:22 -0500 | edited question | How to synchronize data between 2 different ROS nodes? How to synchronize data between 2 different ROS nodes? Note: Q is not about time/timestamps synchronization. It's only a |
| 2021-04-26 16:27:49 -0500 | asked a question | How to synchronize data between 2 different ROS nodes? How to synchronize data between 2 different ROS nodes? Note: Q has nothing to do with time/timestamps synchronization. I |
| 2021-03-21 10:28:17 -0500 | received badge | ● Student (source) |
| 2020-12-18 13:33:59 -0500 | marked best answer | ROS1 stop sending all messages for seconds
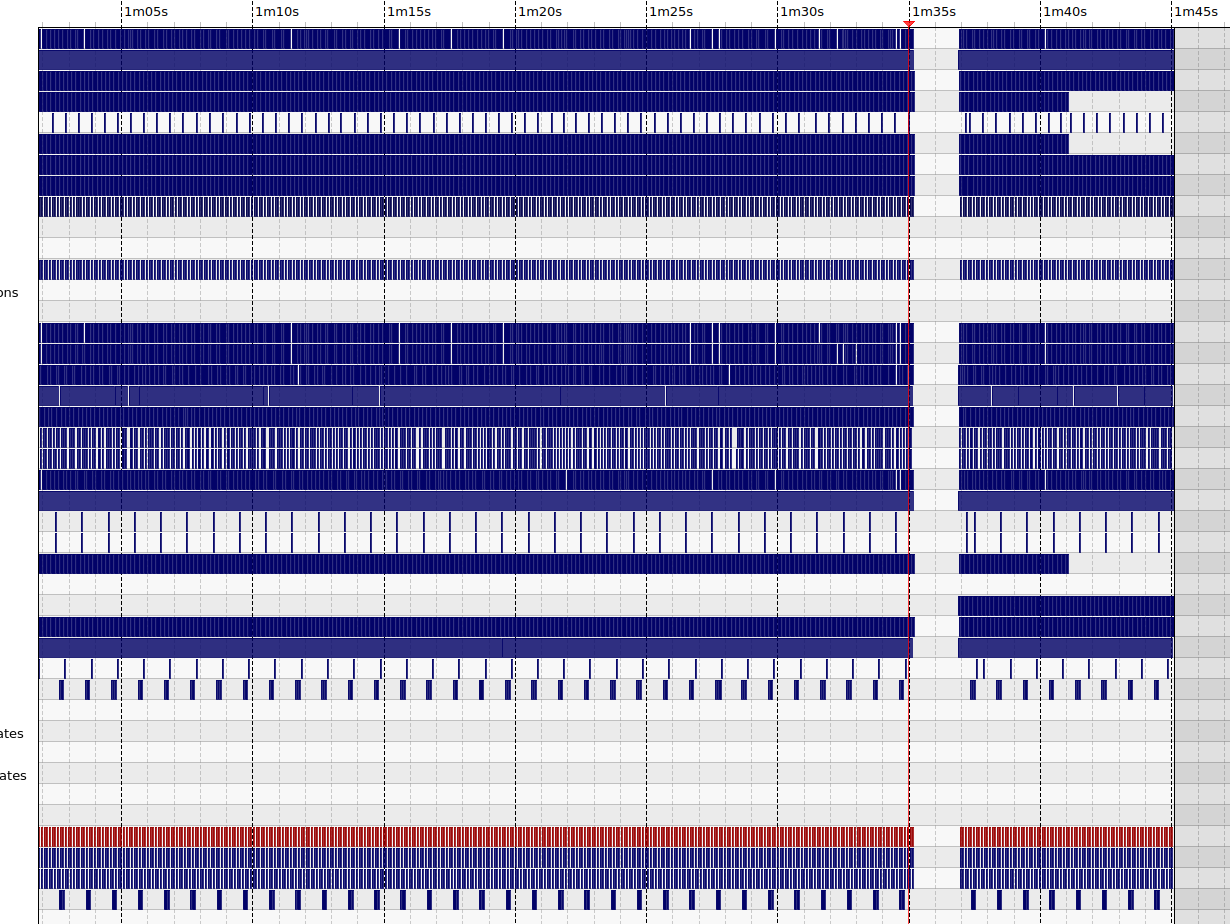
Image worth a thousand words. At arbitrary time all the messages in all topics are stop sending for ~2 sec. without apparent reason. CPU loading at the moment was not highest - about 70% on few CPUs and 0% on others. After the gap, sending continued without delays as before. One observation: after the gap, header.seq for all messages continued normally without lose. E.g. for one message the last header.seq before gap was 1031 and the next one after gap was 1032 - nothing lost. So I don't think it's a rosbag problem. Most likely it's a ROS problem. I understand it's barely possible to say exactly what happened. I'm rather looking for advice on how to investigate it and what direction to dig into here: what are possible reasons, what else to check? Tech details: ROS1 Melodic, Ubuntu 18, Hardware: 8x3hz CPU + GPU + 18GB RAM |
| 2020-12-07 16:41:03 -0500 | edited answer | Can I get the pose data from Lidar required in navigation stack? Theoretically you can estimate your pose using lidar data. That is a set of techniques called visual odometry. Most usef |
| 2020-12-07 16:41:03 -0500 | received badge | ● Editor (source) |
| 2020-12-07 16:39:36 -0500 | edited answer | Can I get the pose data from Lidar required in navigation stack? Theoretically you can estimate your pose using lidar data (https://ri.cmu.edu/pub_files/2014/7/Ji_LidarMapping_RSS2014_v |
| 2020-09-24 20:29:22 -0500 | received badge | ● Famous Question (source) |
| 2020-02-13 10:49:56 -0500 | commented answer | ros subscribe to the latest available message No. It won't. https://answers.ros.org/question/50112/unexpected-delay-in-rospy-subscriber/ https://github.com/ros/ros_co |
| 2019-11-22 17:50:10 -0500 | commented question | When writing gtests with ROS, why doesn't the FRIEND_TEST macro work? I've found workaround which satisfied my need. #ifdef UNIT_TESTING_ON public: #else private: #endif Then to enable |
| 2019-11-22 17:49:40 -0500 | commented question | When writing gtests with ROS, why doesn't the FRIEND_TEST macro work? I've found workaround which satisfied my need. ifdef UNIT_TESTING_ON public: else private: endif Then to enable te |
| 2019-08-17 19:24:26 -0500 | received badge | ● Notable Question (source) |
| 2019-08-01 13:48:55 -0500 | commented question | When writing gtests with ROS, why doesn't the FRIEND_TEST macro work? Same problem. Actual error: Compilation fails with msg error: ‘void TargetClass::privateMap()’ is private within this c |
| 2019-07-17 03:52:37 -0500 | received badge | ● Popular Question (source) |
| 2019-07-16 15:53:55 -0500 | asked a question | ROS1 stop sending all messages for seconds ROS1 stop sending all messages for seconds Image worth a thousand words. At arbitrary time all the messages in all to |
| 2019-06-12 05:19:17 -0500 | received badge | ● Teacher (source) |
| 2019-06-07 20:13:23 -0500 | commented question | How to filter camera noise I'd start with ROS open cv: https://docs.opencv.org/3.2.0/d5/d69/tutorial_py_non_local_means.html |
| 2019-06-07 20:07:20 -0500 | commented question | Cannot import custom python module in custom python pkg Can you post your CMakeList.txt file? |
| 2019-06-07 20:05:59 -0500 | commented question | Simulating real camera data This message means you don't have TF (http://wiki.ros.org/tf) between those cameras published. TF between 2 cameras most |
| 2019-06-07 20:05:27 -0500 | commented question | Simulating real camera data This message means you don't have TF (http://wiki.ros.org/tf) between those to cameras published. TF between 2 cameras m |
| 2019-06-07 19:33:57 -0500 | answered a question | Delphi ESR 2.5 - Python code to start Connect your Kvaser adapter to usb Make sure it's visible: ifconig -a should show can0 (or other canX interface) Up you |
| 2019-06-07 19:18:39 -0500 | answered a question | Can I get the pose data from Lidar required in navigation stack? Theoretically you can estimate your pose using lidar data. That is a set of techniques called visual odometry. But it's |
| 2019-05-20 02:12:17 -0500 | marked best answer | Catkin: run specific unit test I know there are specific test commands
One test file can have multiple tests though. Example: Is that possible to run only testsuit1 or only test3 from my example? |
| 2018-01-12 13:11:11 -0500 | received badge | ● Enthusiast |
| 2017-11-15 08:47:54 -0500 | received badge | ● Notable Question (source) |
| 2017-11-15 08:47:54 -0500 | received badge | ● Famous Question (source) |
| 2017-09-18 18:13:24 -0500 | received badge | ● Popular Question (source) |
| 2017-09-18 14:55:02 -0500 | asked a question | Catkin: run specific unit test Catkin: run specific unit test I know there are specific test commands catkin_make run_tests to run all tests and catkin |
| 2017-08-16 18:03:25 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.