The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-07-24 13:51:35 -0500 | received badge | ● Famous Question (source) |
| 2020-07-24 13:51:35 -0500 | received badge | ● Popular Question (source) |
| 2020-07-24 13:51:35 -0500 | received badge | ● Notable Question (source) |
| 2020-05-18 18:53:20 -0500 | received badge | ● Nice Answer (source) |
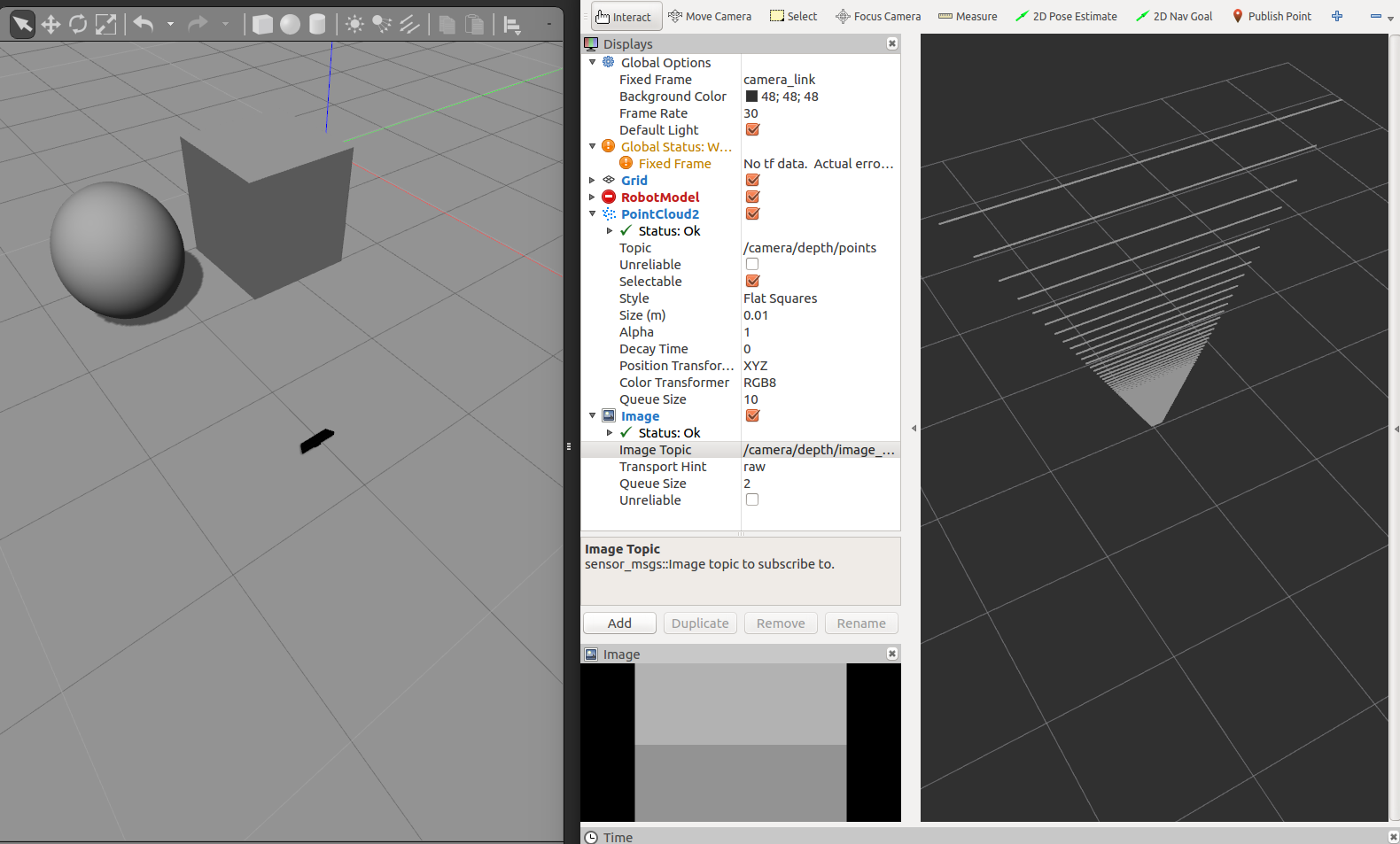
| 2019-03-15 07:20:07 -0500 | marked best answer | Kinect sensor unable to see objects placed in front of it Hey everyone! I am Aaditya Saraiya and to start of my GSoC 2018 project, I wish to simulate a Kinect sensor in Gazebo. I followed the Gazebo tutorial to simulate a Kinect sensor which uses the OpenNI driver. I am running ROS Kinetic on Ubuntu 16.04, Gazebo version 7 and RViz version 1.12.15 (kinetic). Initially, rostopic list was not showing the depth and image topics.This post helped me to solve that issue. However, even though the point cloud data is being posted, the sphere placed in front of the Kinect is not visible in RViz, which can be observed in the image. I tried moving the Kinect near and farther away from the objects considering the fact that Kinect has a minimum and maximum depth of visibility.
Some peculiar things which I noted was that on using rostopic echo on the /tf topic, there is warning message which is as follows:
However, infact, the /clock is being published (automatically by Gazebo I think). Secondly, Fixed frame window under the Global status in Rviz has the following warning.
I have added the camera plugin as well which has been taken from the Gazebo tutorial. Is there some issue behind tf not being published properly? Thanks in advance! |
| 2018-12-18 00:35:13 -0500 | received badge | ● Famous Question (source) |
| 2018-12-04 07:03:54 -0500 | received badge | ● Famous Question (source) |
| 2018-10-09 03:11:04 -0500 | received badge | ● Famous Question (source) |
| 2018-08-13 20:54:48 -0500 | received badge | ● Famous Question (source) |
| 2018-08-11 13:22:00 -0500 | received badge | ● Famous Question (source) |
| 2018-07-21 17:18:01 -0500 | received badge | ● Notable Question (source) |
| 2018-07-20 15:34:04 -0500 | edited answer | Can't display occupied voxels octomap using pointcloud2 Hey! I just checked your files. I think you have a one specific issue. Your sensor_manager.launch does not load the |
| 2018-07-20 15:33:29 -0500 | answered a question | Can't display occupied voxels octomap using pointcloud2 Hey! I just checked your files. I think you have a one specific. Your sensor_manager.launch does not load the sensor |
| 2018-07-20 15:17:05 -0500 | commented question | Problems with ur3 Simulation Hi! Can you post the results of rosrun tf view_frames followed by an evince frames.pdf? |
| 2018-07-20 12:03:03 -0500 | received badge | ● Notable Question (source) |
| 2018-07-18 06:30:40 -0500 | asked a question | Multiple and flipped octomaps being generated Multiple and flipped octomaps being generated Hi everyone, So as a part of my GSoC 2018 project, I am using the Kinect |
| 2018-07-16 14:26:59 -0500 | received badge | ● Popular Question (source) |
| 2018-07-16 14:24:44 -0500 | marked best answer | The weight on position constraint for link is near zero. Setting to 1.0. Hi, While trying to move a robotic manipulator to a new pose (using MoveIt!), in order to move to the Next Best View of the manipulator's workspace using the YAK package, I repeatedly get this warning which states that
Is this the reason why I am getting the following error?
|
| 2018-07-16 14:24:39 -0500 | answered a question | The weight on position constraint for link is near zero. Setting to 1.0. Just for future reference. By adding the following line, this warning can be avoided. More details available in this pul |
| 2018-07-16 14:22:37 -0500 | marked best answer | Tf has two or more unconnected trees Hey! I was trying to use a Kinect fusion package for my project on Robot Workcell Discovery. I am using ROS Kinetic and Ubuntu 16.04. While launching the Kinect fusion node, I face the following error.
How as per the Link to the tf frames.pdf file generated created using On some occasions, the same launch file gives the following error.
This is the related code I have added Listener. waitForTransform() as mentioned in this answer. I have also added There definitely seems to be a problem of the Edit: In one case, I received this error message as well which according to this link is again due to a delayed source of frames.
Output of tf monitor |
| 2018-07-10 05:00:10 -0500 | received badge | ● Famous Question (source) |
| 2018-07-07 09:06:13 -0500 | edited question | The weight on position constraint for link is near zero. Setting to 1.0. The weight on position constraint for link is near zero. Setting to 1.0. Hi, While trying to move a robotic manipulator |
| 2018-07-07 09:03:54 -0500 | asked a question | The weight on position constraint for link is near zero. Setting to 1.0. The weight on position constraint for link is near zero. Setting to 1.0. Hi, While trying to move a robotic manipulator |
| 2018-07-02 11:43:10 -0500 | received badge | ● Notable Question (source) |
| 2018-06-27 08:36:46 -0500 | answered a question | Tf has two or more unconnected trees Hi! Just for anyone facing a similar issue in the future. Instead of if (!camera->nodeHandle.getParam("use_pose_ |
| 2018-06-27 08:09:25 -0500 | received badge | ● Notable Question (source) |
| 2018-06-27 05:31:53 -0500 | edited question | Tf has two or more unconnected trees Tf has two or more unconnected trees Hey! I was trying to use a Kinect fusion package for my project on Robot Workcell D |
| 2018-06-27 02:49:17 -0500 | received badge | ● Popular Question (source) |
| 2018-06-27 02:09:22 -0500 | commented answer | Tf has two or more unconnected trees Is the time delay created because I am launching them separately? Should I be launching everything together? Edit: The |
| 2018-06-27 02:09:10 -0500 | commented answer | Tf has two or more unconnected trees Is the time delay created because I am launching them separately? Should I be launching everything together? Edit: The |
| 2018-06-27 02:08:05 -0500 | edited question | Tf has two or more unconnected trees Tf has two or more unconnected trees Hey! I was trying to use a Kinect fusion package for my project on Robot Workcell D |
| 2018-06-27 01:59:17 -0500 | commented answer | Tf has two or more unconnected trees Is the time delay created because I am launching them separately? Should I be launching everything together? Thanks in |
| 2018-06-27 01:58:12 -0500 | commented answer | Tf has two or more unconnected trees Hey Pete! Thanks a lot for your reply. So actually I am not using different machines. It's all running on the same mach |
| 2018-06-26 08:45:35 -0500 | asked a question | Tf has two or more unconnected trees Tf has two or more unconnected trees Hey! I was trying to use a Kinect fusion package for my project on Robot Workcell D |
| 2018-05-30 17:45:06 -0500 | commented answer | octomap, slam, path planning: how does it all fit together? Thanks for a detailed review! |
| 2018-05-26 13:00:04 -0500 | marked best answer | arm_controller/joint_trajectory topics not being displayed Hey! For my GSoC 2018 project, I had previously attached a Kinect sensor to the UR5 robot, generated MoveIt! Config packages for them and tested it on RViz. I was able to spawn the robot with the controllers activated in Gazebo. The next step of my project was to be able to command the robot in Gazebo using MoveIt!. In this process of trying to launch the robot in Gazebo, I noticed that the arm_controller/joint_trajectory topics which are related to the action server are not being displayed while using rostopic list. However, the weird part is that on launch, the initial information from the terminal shows that the arm_controller_spawner node has started. This link had a related solution but it didn't work. I previously downloaded the Universal robot Github package and the ur5.launch file loads the required arm_controller.joint_trajectory topics properly. However, that same thing was not working with my files (which are minor edits of the UR5 files). I am not able to figure out why exactly is this happening. I have attached the related files with this question. Thanks in advance. Edit: While comparing with the UR5 launch, I realised that the arm_controller and joint_state_controller are not loaded successfully with my model as that message is not showing on the terminal with Gazebo launch. The complete URDF file can be accessed via this Google Drive Link. Gazebo Robot Launch file workcell_ur5.launch file controller_utils.launch myworkcell_control.yaml |
| 2018-05-26 12:59:53 -0500 | answered a question | arm_controller/joint_trajectory topics not being displayed So after a bit of experimentation, I realized that the issue was with the URDF file where the control plugin had been pu |
| 2018-05-26 07:55:35 -0500 | received badge | ● Popular Question (source) |
| 2018-05-25 03:47:11 -0500 | commented question | arm_controller/joint_trajectory topics not being displayed Oops. Sorry for that. Have removed the screenshots. Thanks! |
| 2018-05-25 03:46:25 -0500 | commented question | arm_controller/joint_trajectory topics not being displayed Oops. Sorry for that. Have removed the screenshots. |
| 2018-05-25 03:44:47 -0500 | edited question | arm_controller/joint_trajectory topics not being displayed arm_controller/joint_trajectory topics not being displayed Hey! For my GSoC 2018 project, I had previously attached a |
| 2018-05-24 17:58:55 -0500 | edited question | arm_controller/joint_trajectory topics not being displayed arm_controller/joint_trajectory topics not being displayed Hey! For my GSoC 2018 project, I had previously attached a |
| 2018-05-24 17:51:45 -0500 | asked a question | arm_controller/joint_trajectory topics not being displayed arm_controller/joint_trajectory topics not being displayed Hey! For my GSoC 2018 project, I had previously attached a |
| 2018-05-14 10:22:00 -0500 | received badge | ● Notable Question (source) |
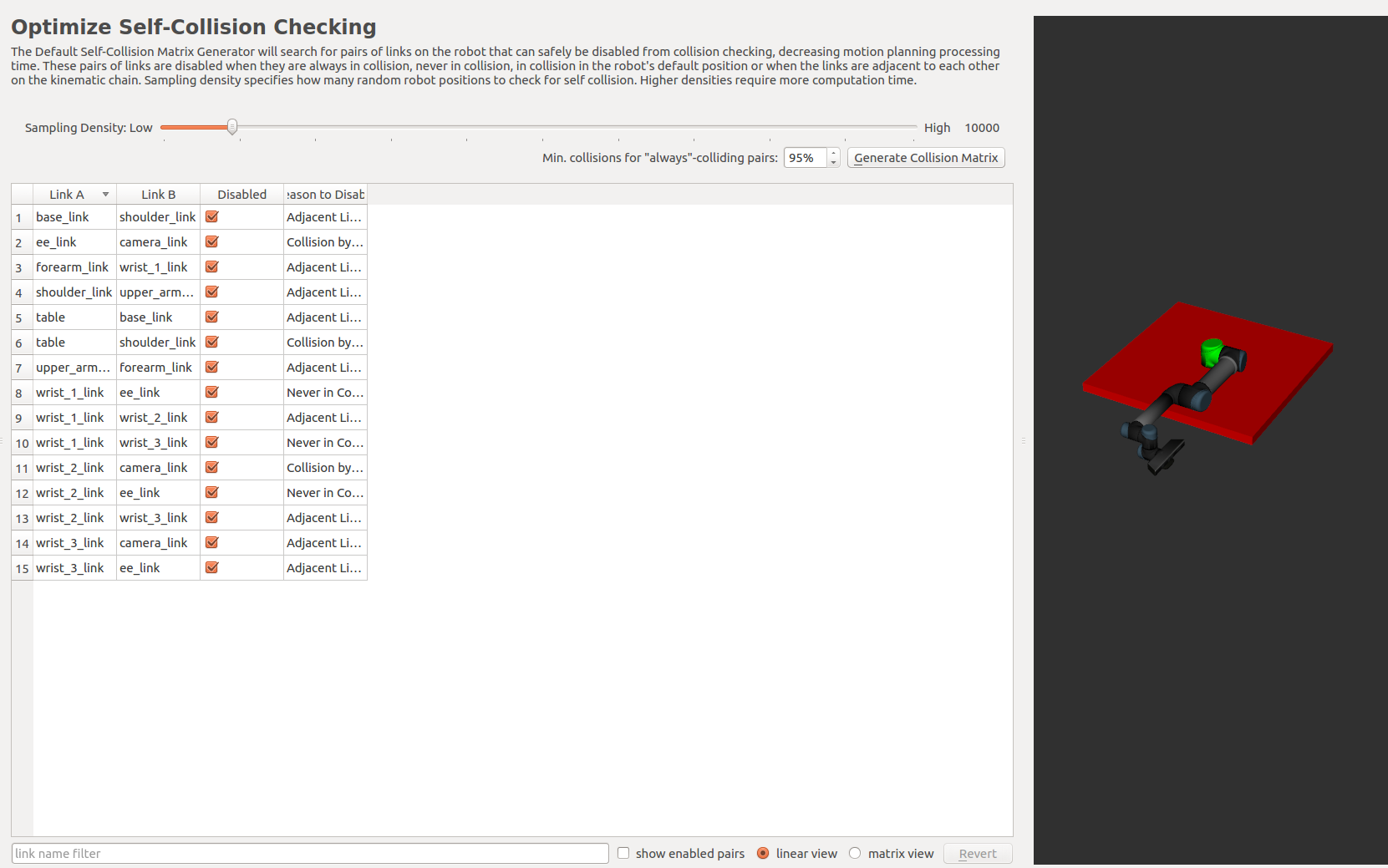
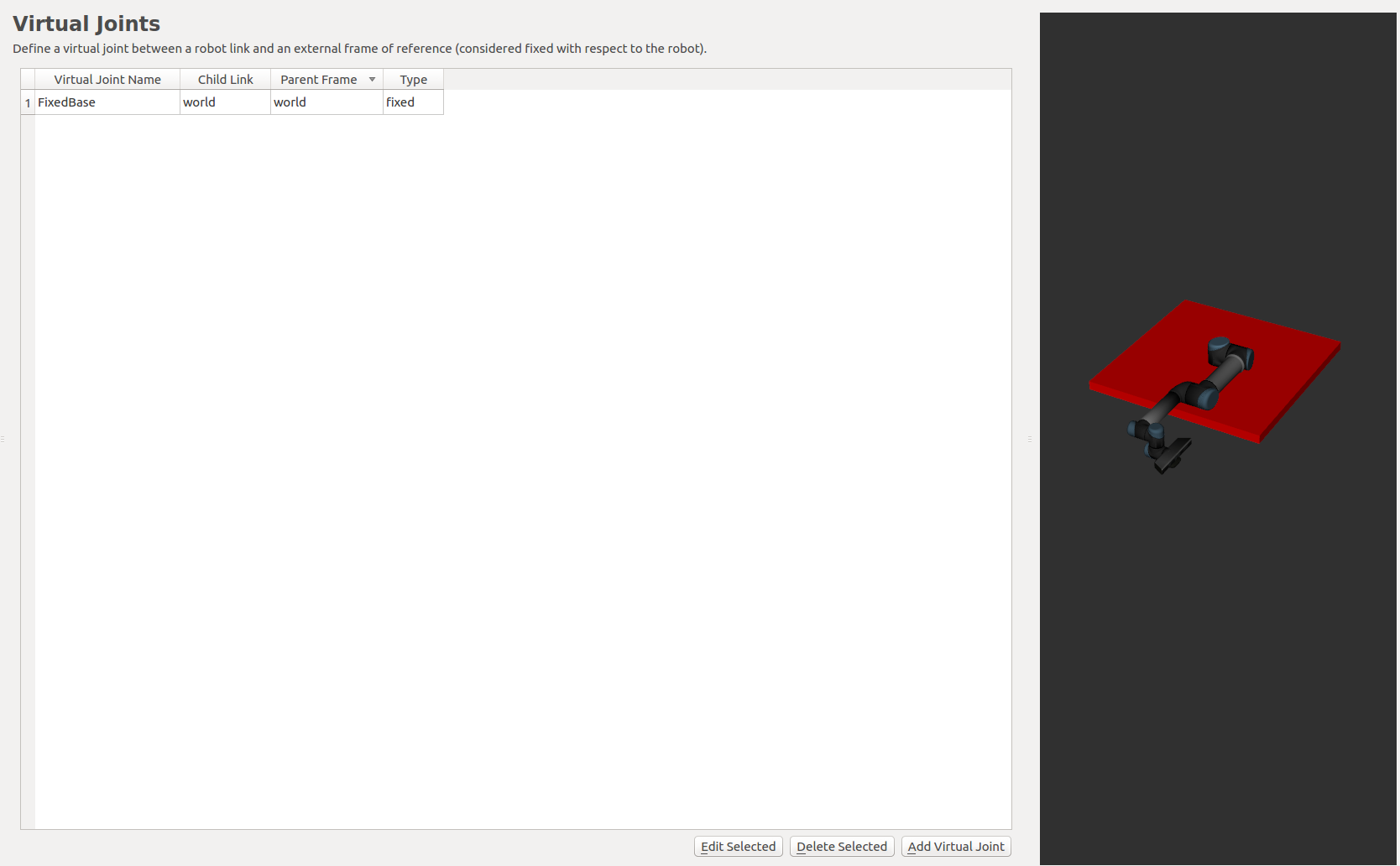
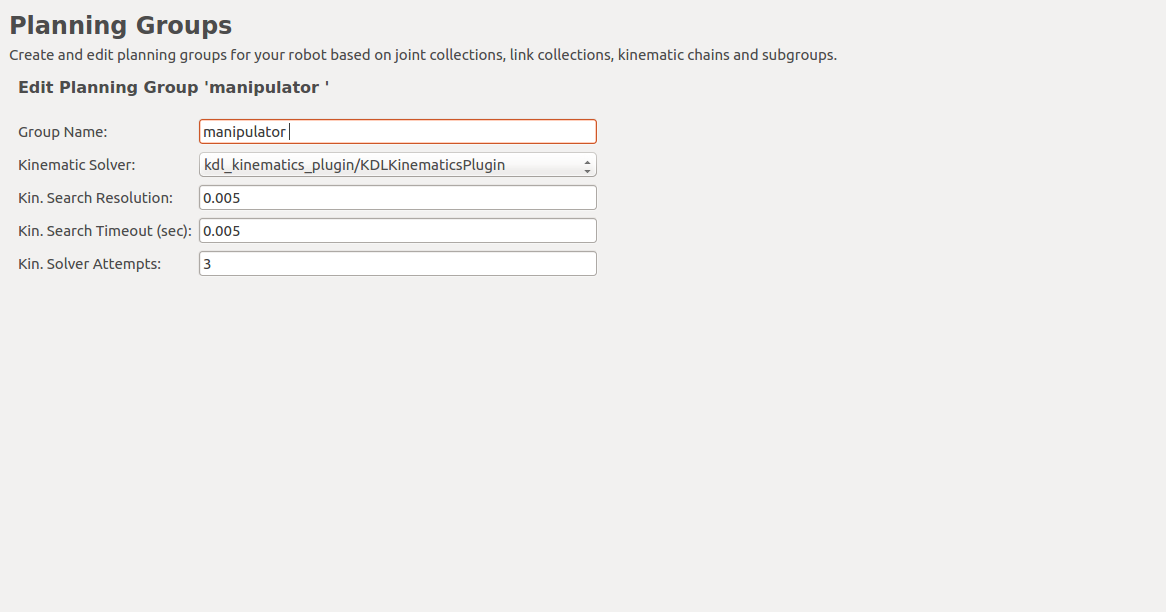
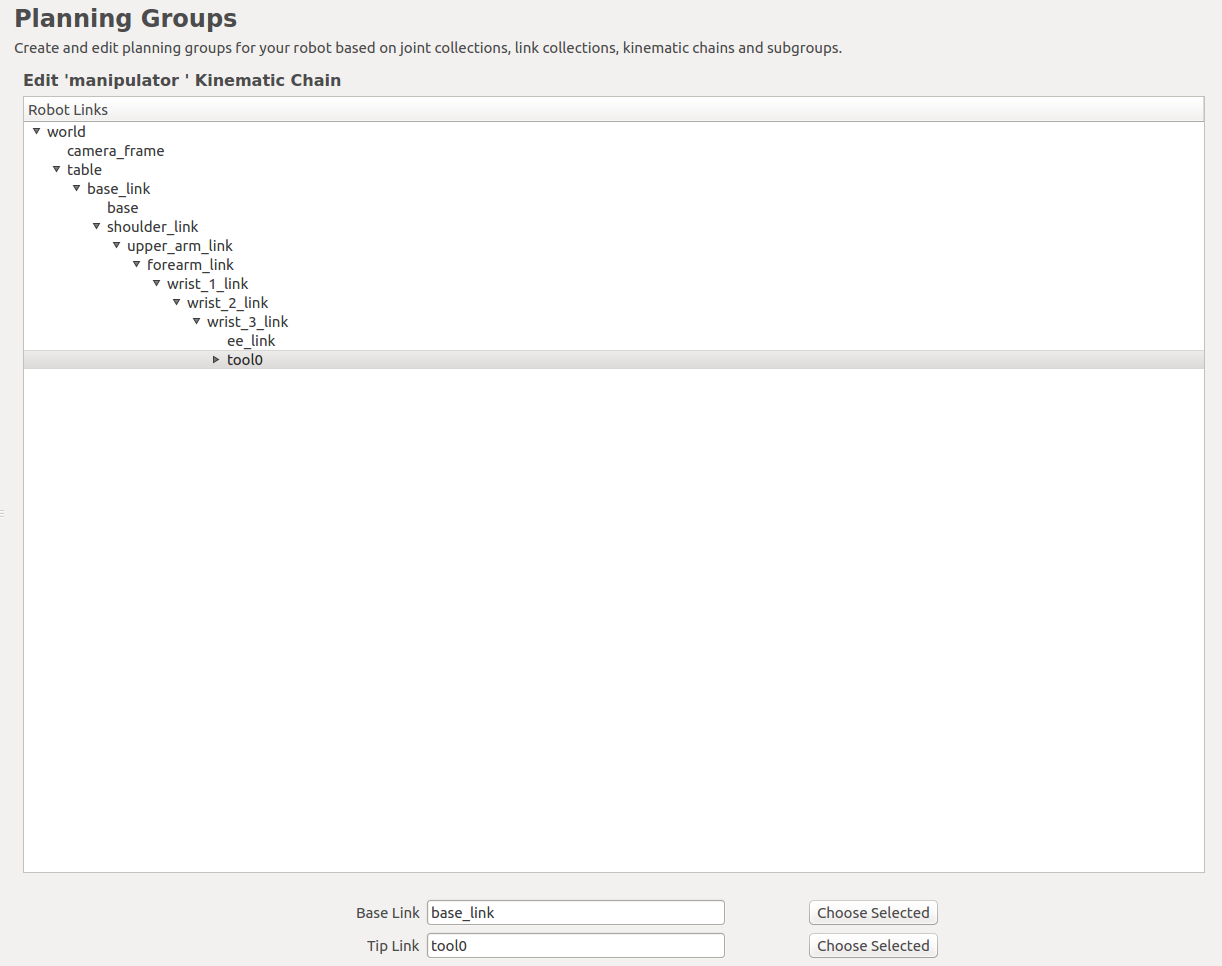
| 2018-05-13 19:00:42 -0500 | marked best answer | Error in Planning group with MoveIt! Setup Assistant Hey! I had successfully created a working URDF file for the UR5 robot with a Kinect sensor attached to the end-effector. I have verified the URDF file using check_urdf. I wished to use the URDF file with Gazebo as well as RViz, for which I was following this link). I am using ROS Kinetic with Ubuntu 16.04. For creation of the MoveIt! configuration package, I was referring to MoveIt setup assistant tutorial, this tutorial and the ROS Industial tutorial. I have created the self-collision matrix and the virtual joints as per the ROS-I tutorial. The ROS-I suggested that I add the planning group with the name 'manipulator' and by adding a Kinematic chain from the base_link to the tool0 (end-effector) link. However when I try to add robot poses with this planning group, I get this following error message.
Because of this, I was not able to visualise the joint motions as well as set a pose. Any particular reason for this error? I have attached the related pictures for reference. Thanks in advance.
Edit: I have checked the same procedure with standard URDF files from the UR5 and UR10 robot. I am still getting the same error. Update: Added the link to the URDF file |
| 2018-05-13 19:00:35 -0500 | answered a question | Error in Planning group with MoveIt! Setup Assistant Solved it. Turns out it was a stupid mistake. While making the new planning group, I was adding an extra space at the en |
| 2018-05-13 18:37:49 -0500 | edited question | Error in Planning group with MoveIt! Setup Assistant Error in Planning group with MoveIt! Setup Assistant Hey! I had successfully created a working URDF file for the UR5 ro |
| 2018-05-13 18:30:02 -0500 | edited question | Error in Planning group with MoveIt! Setup Assistant Error in Planning group with MoveIt! Setup Assistant Hey! I had successfully created a working URDF file for the UR5 ro |
| 2018-05-13 17:46:30 -0500 | received badge | ● Popular Question (source) |
| 2018-05-13 16:54:01 -0500 | edited question | Error in Planning group with MoveIt! Setup Assistant Error in Planning group with MoveIt! Setup Assistant Hey! I had successfully created a working URDF file for the UR5 ro |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.