The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-02-13 16:53:13 -0500 | received badge | ● Famous Question (source) |
| 2015-12-28 10:13:12 -0500 | received badge | ● Nice Question (source) |
| 2014-10-28 12:25:30 -0500 | received badge | ● Taxonomist |
| 2014-07-25 14:23:35 -0500 | received badge | ● Enthusiast |
| 2014-03-16 23:31:16 -0500 | received badge | ● Famous Question (source) |
| 2014-01-28 17:28:56 -0500 | marked best answer | How to know which object roboearth is seeing Hi! I'm new with roboearth. I've already created some models in my computer and I have also succeded when trying to detect the object. The problem is: when I load different models and I put the detector to work, is there any way to know which object is being detected? I mean, is there a service/node/something that says "I've detected a box", "I've detected a can", etc. ? Any help is welcome! Thanks! |
| 2014-01-28 17:28:15 -0500 | marked best answer | RoboEarth installation using rosinstall Hi, I'm trying to install RoboEarth on my Ubuntu 10.10 and I'm following the steps at the wiki page. Somewhere along the line, I have to use the command E: Unable to locate package python-rosinstall. If I try the command sudo: pip:command not found. What should I do? I'm a beginner, so any help is welcome! Thanks! EDIT: After michikarg's help, I was able to run rosinstall but I'm still having problems with the installation process. Some of the dependencies were not found, even some that are already installed such as Here is the log message (by the way, I'm using ROS Electric): asimo@asimo:~/ros/stacks/roboearth$ rosmake [ rosmake ] No package specified. Building stack ['roboearth'] [ rosmake ] Packages requested are: ['roboearth'] [ rosmake ] Logging to directory/home/asimo/.ros/rosmake/rosmake_output-20121129-141352 [ rosmake ] Expanded args ['roboearth'] to: ['re_ontology', 're_comm', 're_msgs', 're_vision', 're_comm_core', 're_srvs', 're_2dmap_extractor', 're_object_detector_gui', 'ar_bounding_box', 're_object_recorder', 're_kinect_object_detector'] [ rosmake ] Checking rosdeps compliance for packages roboearth. This may take a few seconds. Failed to find rosdep libqt4-dev for package re_object_recorder on OS:ubuntu version:maverick Failed to find rosdep opencv2 for package re_object_recorder on OS:ubuntu version:maverick Failed to find rosdep suitesparse for package re_vision on OS:ubuntu version:maverick WARNING: Rosdeps [u'libqt4-dev', u'opencv2', u'suitesparse'] could not be resolved Failed to find rosdep libqt4-dev for package re_object_recorder on OS:ubuntu version:maverick Failed to find rosdep opencv2 for package re_object_recorder on OS:ubuntu version:maverick Failed to find rosdep suitesparse for package re_vision on OS:ubuntu version:maverick [ rosmake ] rosdep check failed to find system dependencies: libjson-glib, libqt4-dev, opencv2, libjson-java, suitesparse [rosmake-0] Starting >>> rosbuild [ make ] [rosmake-0] Finished <<< rosbuild ROS_NOBUILD in package rosbuild No Makefile in package rosbuild [rosmake-1] Starting >>> cpp_common [ make ] [rosmake-1] Finished <<< cpp_common ROS_NOBUILD in package cpp_common [rosmake-0] Starting >>> roslang [ make ] [rosmake-1] Starting >>> roscpp_traits [ make ] [rosmake-0] Finished <<< roslang ROS_NOBUILD in package roslang No Makefile in package roslang [rosmake-1] Finished <<< roscpp_traits ROS_NOBUILD in package roscpp_traits [rosmake-1] Starting >>> rostime [ make ] [rosmake-1] Finished <<< rostime ROS_NOBUILD in package rostime [rosmake-0] Starting >>> roslib [ make ] [rosmake-1] Starting >>> roscpp_serialization [ make ] [rosmake-0] Finished <<< roslib ROS_NOBUILD in package roslib [rosmake-1] Finished <<< roscpp_serialization ROS_NOBUILD in package roscpp_serialization [rosmake-1] Starting >>> xmlrpcpp [ make ] [rosmake-1] Finished <<< xmlrpcpp ROS_NOBUILD in package xmlrpcpp [rosmake-1] Starting >>> rosconsole [ make ] [rosmake-1] Finished <<< rosconsole ROS_NOBUILD in package rosconsole [rosmake-1] Starting >>> tinyxml [ make ] [rosmake-0] Starting >>> std_msgs [ make ] [rosmake-1] Finished <<< tinyxml ROS_NOBUILD in package tinyxml [rosmake-1] Starting >>> rosclean [ make ] [rosmake-1] Finished <<< rosclean ROS_NOBUILD in package rosclean [rosmake-1] Starting >>> rosgraph [ make ] [rosmake-1] Finished <<< rosgraph ROS_NOBUILD in package rosgraph [rosmake-0] Finished <<< std_msgs ROS_NOBUILD in package std_msgs [rosmake-1] Starting >>> rosparam [ make ] [rosmake-0] Starting >>> rosgraph_msgs [ make ] [rosmake-0] Finished <<< rosgraph_msgs ROS_NOBUILD in package rosgraph_msgs [rosmake-0] Starting >>> roscpp [ make ] [rosmake-1] Finished <<< rosparam ROS_NOBUILD in package rosparam [rosmake-0] Finished <<< roscpp ROS_NOBUILD in package roscpp [rosmake-1] Starting >>> rospy [ make ] [rosmake-1] Finished <<< rospy ROS_NOBUILD in package rospy [rosmake-1] Starting >>> rosmaster [ make ] [rosmake-0 ...(more) |
| 2014-01-28 17:27:31 -0500 | marked best answer | How to put Hokuyo laser sensor on p2os? I'm new at gazebo, and I would like to know how to put a hokuyo sensor on my p2os model. I am not using a real robot, I just want to know how to add a sensor on my simulation. Thanks! |
| 2014-01-20 01:48:18 -0500 | received badge | ● Famous Question (source) |
| 2014-01-20 01:39:21 -0500 | commented answer | ar_pose on ROS Hydro Also, I add "Camera", "Grid" and "Marker" on ''rviz'' and I set Fixed Frame to "/camera", Marker Topic to "visualization_marker", and Image Topic to "/usb_cam/image_raw". Any suggestion? |
| 2014-01-20 01:36:53 -0500 | commented answer | ar_pose on ROS Hydro Hi Artem. Thank you for this sugestion! It still doesn't work. Here is what I do: $roscore; $rosrun camera1394 camera1394_node _video_mode:=640x480_rgb8 /camera/image_raw:=usb_cam/image_raw; $ROS_NAMESPACE=usb_cam rosrun image_proc image_proc; $rosrun ar_pose ar_multi; $rosrun rviz rviz |
| 2014-01-20 01:32:01 -0500 | received badge | ● Commentator |
| 2014-01-20 01:32:01 -0500 | commented question | ar_pose on ROS Hydro Thank you for your comment! Well, I'm using this repo. |
| 2013-12-01 22:12:00 -0500 | received badge | ● Notable Question (source) |
| 2013-11-25 15:08:28 -0500 | received badge | ● Notable Question (source) |
| 2013-11-15 15:23:00 -0500 | received badge | ● Popular Question (source) |
| 2013-11-14 04:29:39 -0500 | asked a question | ar_pose on ROS Hydro Hi everyone! I've been using ar_pose on ROS Fuerte for some time, but I want to update and start working with ROS Hydro. However, ar_pose doesn't work when using Groovy and Hydro. Is there any update or any changes that should be made in order to have it working? Thanks! |
| 2013-09-30 08:37:59 -0500 | commented question | p2os connection Has anybody managed to solve this problem? I'm facing the same issue... I'm using a Pioneer P3-AT, Ubuntu 12.04 LTS, ROS Hydro. |
| 2013-09-23 22:05:01 -0500 | received badge | ● Famous Question (source) |
| 2013-06-20 03:34:59 -0500 | received badge | ● Notable Question (source) |
| 2013-06-18 02:45:28 -0500 | received badge | ● Popular Question (source) |
| 2013-06-09 10:55:53 -0500 | received badge | ● Famous Question (source) |
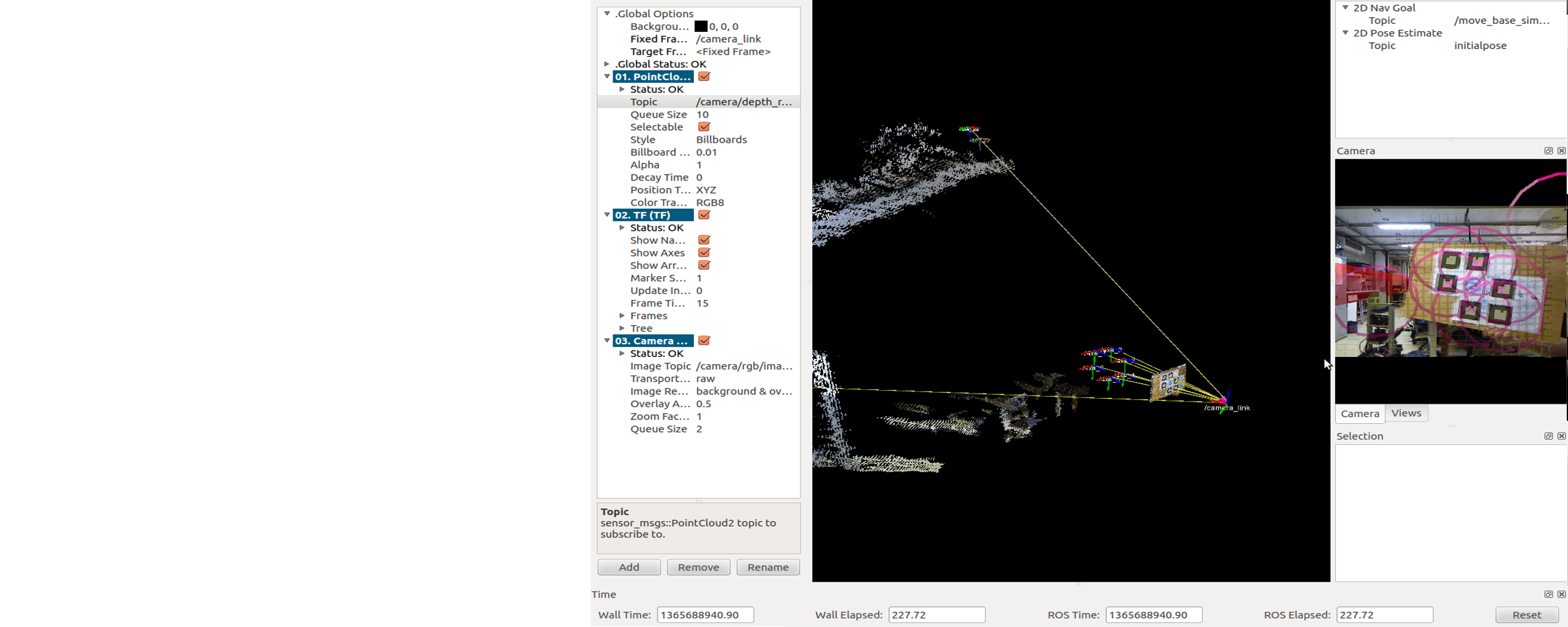
| 2013-06-07 00:17:31 -0500 | marked best answer | Can't get correct position of ARMarkers Hi everyone! I'm using ar_pose to identify some markers. It identifies the markers correctly (pattern 1, 2, etc.), but their positions are not very good. The distance is not being correctly assigned. I guess this is not ar_pose's problem. See the image below:
Could it be a depth_registration issue? Also, I tried calibrating my camera (kinect) following these tutorials: If couldn't make myself clear, please, tell me, so that I can explain it better. I would really appreciate if someone could help me! Thanks! |
| 2013-06-06 04:53:19 -0500 | asked a question | Pioneer3-AT Rviz/urdf model Hi everyone! I am running a SLAM simulation using a Pioneer3-AT and it would be usefull if I had the pioneer's model on Rviz. That is, is there a way or a place where I can get a model of the P3-AT running on Rviz (urdf?) ? My objective is to have the real pioneer working on real world and a "picture" of him running on Rviz (in the same position as my "\base_link"). I know there is p2os_urdf, but the model it gives is not exactly the one I want. Is there an easy way to edit this model into the one I want? Thanks in advance! |
| 2013-06-04 03:53:21 -0500 | received badge | ● Notable Question (source) |
| 2013-06-04 00:29:07 -0500 | received badge | ● Popular Question (source) |
| 2013-04-23 04:20:01 -0500 | marked best answer | Getting image_color from camera1394 Hi everyone! I'm trying to get the image from my Fire-i400 1394 camera. In order to do that, I am using the following comands: $ rosrun camera1394 camera1394_node $ ROS_NAMESPACE=camera rosrun image_proc image_proc $ rosrun image_view image_view image:=camera/image_rect_color and this should give me the images, with color. But I'm getting the following message: Color topic '/camera/image_color' requested, but raw image data from topic '/camera/image_raw' is grayscale then, the images come up, but they are on grayscale. Does anybody know why it is happening? What am I doing wrong? Thanks in advance! |
| 2013-04-23 04:19:55 -0500 | commented answer | Getting image_color from camera1394 Thank you joq! Actually, I just had to use $ rosrun camera1394 camera1394_node _guid:=(my_cam_guid) _video_mode:=640x480_rgb8 |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.