The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-10-25 18:58:36 -0500 | edited answer | declare nested parameter I have a similar problem and opted to import these from a settings json defined by a thrift file. I can iterate over the |
| 2022-10-25 18:58:13 -0500 | answered a question | declare nested parameter I have a similar problem and opted to import these from a settings json defined by a thrift file. I can iterate over the |
| 2022-08-09 16:55:23 -0500 | received badge | ● Critic (source) |
| 2022-06-28 18:41:46 -0500 | commented answer | Colcon test not running gtests I just lost 2 hours of my life because of this. How did you learn about this? |
| 2022-06-01 19:39:08 -0500 | commented answer | Linking OpenCV library (ROS2, C++) How did you know to add OpenCV? Are there docs on this? |
| 2022-05-12 18:53:43 -0500 | commented question | ROS2 static compile Did the proposed answer by Dirk Thomas work for you? |
| 2022-05-12 18:53:10 -0500 | answered a question | ROS2 static compile Hi! Where you able to do this? |
| 2021-10-12 17:58:21 -0500 | marked best answer | rtabmap issue with loop closure Hello, I have an rtabmap setup with:
In simulation and also real life I am getting incorrect loop closure that seem to mess up a good map. Is there any obvious stuff I'm doing wrong here? Here is my rtabmap launch file: A video of the problem: https://youtu.be/tjO-dYugKbw PS: This might be a simple issue having to do with my simulation cause the ground is very ... (more) |
| 2021-01-13 05:59:25 -0500 | received badge | ● Nice Answer (source) |
| 2020-05-21 04:04:07 -0500 | received badge | ● Enlightened (source) |
| 2020-05-21 04:04:07 -0500 | received badge | ● Good Answer (source) |
| 2019-08-07 03:44:09 -0500 | received badge | ● Famous Question (source) |
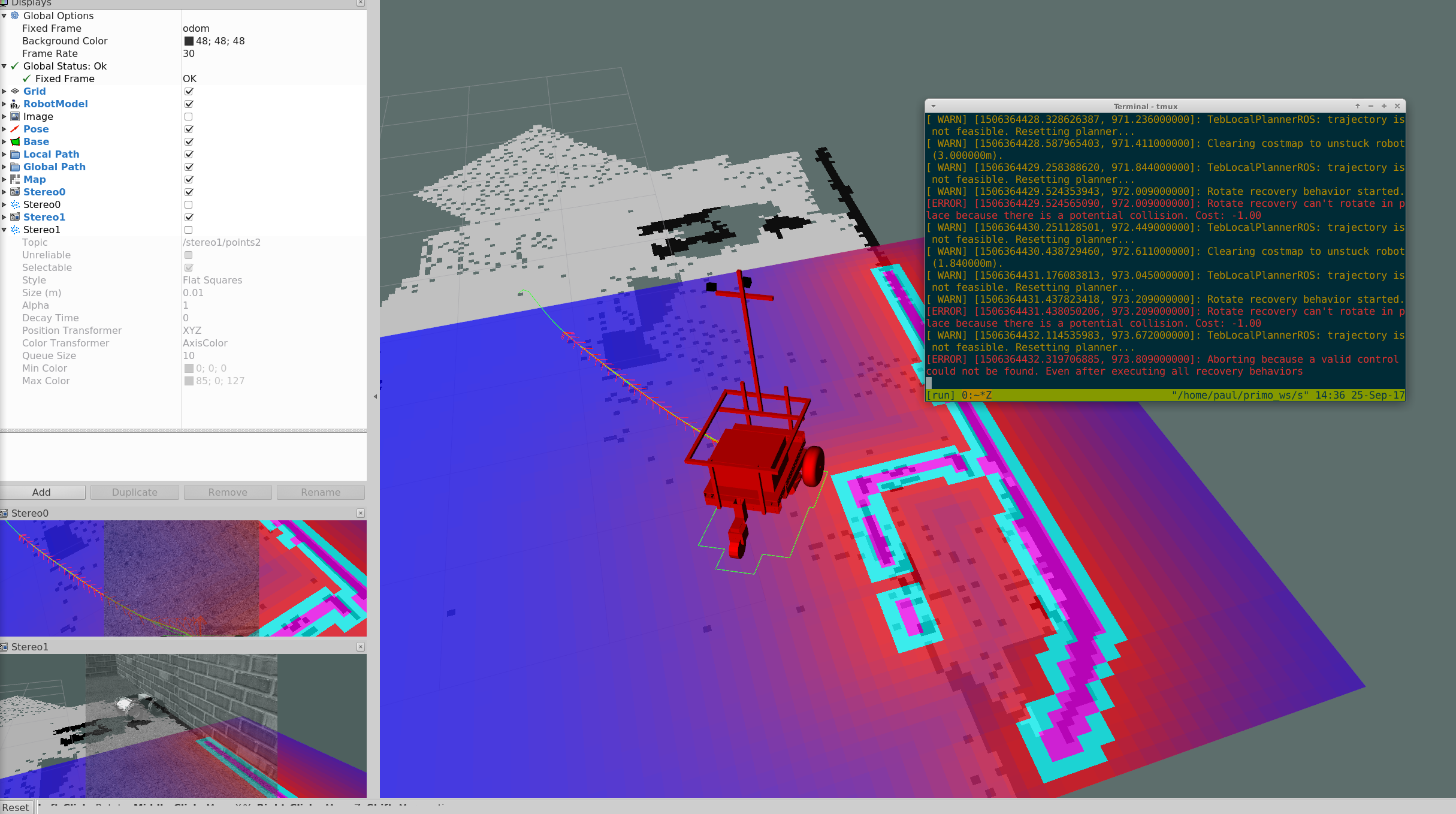
| 2019-05-20 01:09:16 -0500 | marked best answer | Reverse recovery behavior for stuck non circular robots Hello, I have a robot that is having issues getting stuck. In a lot of situations, a simple reverse operation would un stick it. Rotate recovery doesn't work well because my robot's turning center is offset from its body. Before I get to writing one from scratch, is there any reversing type recovery behavior i could get move_base to use?
Thanks! |
| 2019-04-12 14:13:24 -0500 | received badge | ● Nice Question (source) |
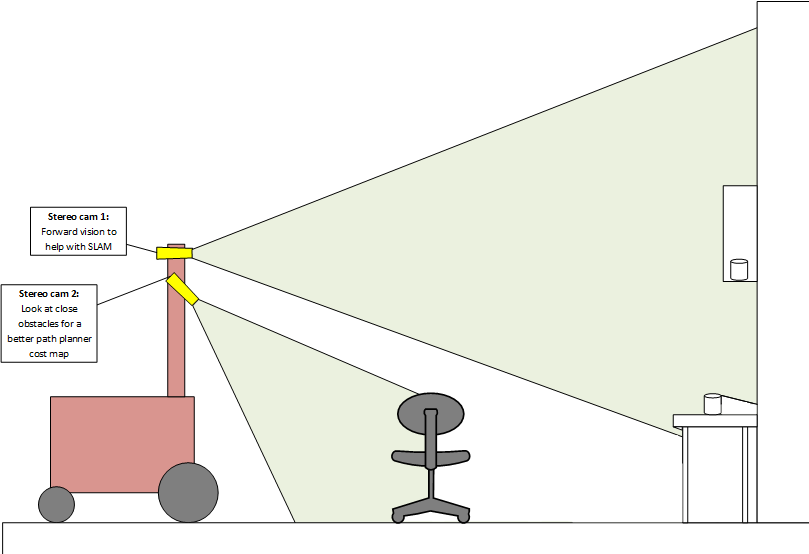
| 2019-03-13 08:24:48 -0500 | marked best answer | RTABMAP with two stereo cameras Hello, first of all thanks to Mathieu Labbe for all his hard work on rtabmap and for bringing it to ROS! I would like to use two stereo cameras to aid in SLAM and also path planning. I have been experimenting with one camera and I found that if I point it forward, SLAM works well but the path planner doesn't because it is guessing about obstacles at the feet of the robot. If I point the camera down path planning works well but mapping suffers. Id like to use two stereo cameras increase path planner obstacle detection accuracy and maintain good map building abilities.
Question is, what is the best way of doing this? rtabmap seems to be written to subscribe to only one stereo camera. Should I combine the point clouds generated by stereo_image_proc? Also I'm unsure as to how I should use my wheel odometry in this setup. It looks like rtab can only use one odometry source. Should I just do visual odometry if it works well enough and pipe that into rtab? I'm experimenting right now with wheel odometry data and one stereo camera with rtab and I'm slightly unsure on how I should connect these systems together. Thanks! |
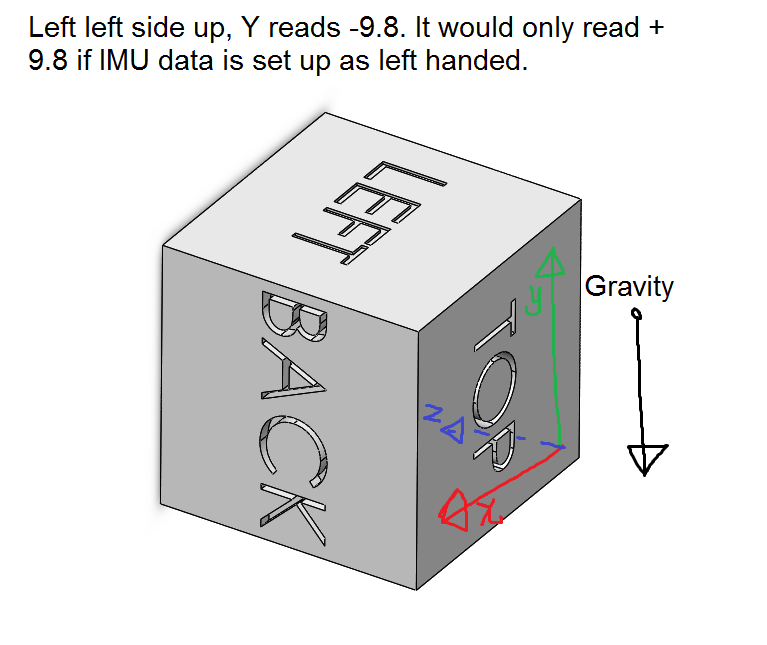
| 2019-03-01 12:45:35 -0500 | marked best answer | robot_localization IMU coordinate frame. My question is: When using the robot_localization package, should the IMU chirality obey the standard right hand rule, or left hand rule? I think there is a discrepancy in the docs. From the docs of the robot_localization package a section about IMU data states the following:
Problem: this documentation says two things. It says the data should adhere to REP-103, which says "All systems are right handed. This means they comply with the right hand rule.". Then it describes an example that could only work on a left hand system. Am I missing something? |
| 2018-10-25 04:43:43 -0500 | received badge | ● Nice Answer (source) |
| 2018-08-29 04:50:40 -0500 | received badge | ● Nice Answer (source) |
| 2018-06-26 16:39:18 -0500 | received badge | ● Famous Question (source) |
| 2018-05-31 11:37:09 -0500 | answered a question | white balance problem for USB camera This is a camera problem and not a ros driver issue. You can confirm this by using a dedicated viewer such as guvcview o |
| 2018-05-30 15:45:01 -0500 | commented question | white balance problem for USB camera Hi! first step when messing is to make sure that the issue lays with ROS/libuvc driver and not the camera. To do this, |
| 2018-04-16 19:42:59 -0500 | commented question | How to install opencv-3.3.1 instead of opencv-3.3.1-dev kinetic I'm also running into this issue. All my source that uses opencv3 is no longer compiling! |
| 2018-04-07 15:09:48 -0500 | received badge | ● Famous Question (source) |
| 2018-04-05 07:45:03 -0500 | received badge | ● Notable Question (source) |
| 2018-01-24 10:19:32 -0500 | commented answer | Obstacles remain in costmap despite observation_persistence being set @Felix Widmaier did you ever get this work for you? Mine still leaves fantom obstacles. :( |
| 2018-01-24 04:06:47 -0500 | received badge | ● Famous Question (source) |
| 2018-01-23 19:49:01 -0500 | commented answer | Obstacles remain in costmap despite observation_persistence being set oh man this is this awesome. Thanks David!!!! Lu! |
| 2018-01-22 17:06:18 -0500 | commented question | Meaning of costmap_2d observation_persistence parameter? Yup. I also have the same exact question. This parameter is broken. Setting it to 0 does not only keep keep the most rec |
| 2017-11-25 00:46:31 -0500 | received badge | ● Notable Question (source) |
| 2017-11-07 04:21:08 -0500 | received badge | ● Popular Question (source) |
| 2017-11-06 16:14:32 -0500 | edited question | robot_localization IMU coordinate frame. robot_localization IMU coordinate frame. My question is: When using the robot_localization package, should the IMU chira |
| 2017-11-06 16:13:59 -0500 | asked a question | robot_localization IMU coordinate frame. robot_localization IMU coordinate frame. My question is: Should the IMU chirality obey the standard right hand rule, or |
| 2017-11-02 09:55:55 -0500 | received badge | ● Notable Question (source) |
| 2017-11-01 06:14:10 -0500 | received badge | ● Nice Answer (source) |
| 2017-10-31 20:59:33 -0500 | commented question | Is this an accurate explanation of a covariance matrix? I found it helpful 5 years later :) |
| 2017-10-31 09:54:18 -0500 | commented question | Linux configuration required to run ros extensively Are you going to be using a virtual machine or real install? A real install is recommended because Rviz and Gazebo will |
| 2017-10-30 08:29:25 -0500 | commented answer | Export matlab monocular camera calibration parameters to ROS how do you calculate the projection_matrix from rectification matrix? I don't know :( You should really look into doing |
| 2017-10-30 08:28:37 -0500 | commented answer | Export matlab monocular camera calibration parameters to ROS camera_name is simply the frame_id of your camera if you defined it in the URDF file of your robot. This allows you to a |
| 2017-10-28 15:31:40 -0500 | edited answer | Export matlab monocular camera calibration parameters to ROS A matlab monocular camera calibration is stored in the format of a cameraParameters object. In ROS, the calibration pa |
| 2017-10-28 12:50:39 -0500 | commented question | Steps-How to Start with Navigation Stack I highly recommend these tutorials on youtube: https://www.youtube.com/watch?v=8ckSl4MbZLg&list=PLTEmcYHVE7dPWixFnzk |
| 2017-10-28 12:47:41 -0500 | answered a question | Debugging ROS nodes in c++ What you can do is download the source of the packages in question, put them in your catkin workspace and compile them, |
| 2017-10-28 12:39:07 -0500 | answered a question | Export matlab monocular camera calibration parameters to ROS A matlab monocular camera calibration is stored in the format of a cameraParameters object. In ROS, the calibration pa |
| 2017-10-27 13:17:51 -0500 | commented question | Export matlab monocular camera calibration parameters to ROS Can you post a sample .mat cal file? A .yaml camera calibration file is nothing special, and simply contains the same in |
| 2017-10-27 13:17:36 -0500 | commented question | Export matlab monocular camera calibration parameters to ROS Can you post a sample .mat cal file? A .yaml camera calibration file is nothing special, and simply contains the same in |
| 2017-10-27 13:17:25 -0500 | commented question | Export matlab monocular camera calibration parameters to ROS Can you post a sample .mat file? A .yaml camera calibration file is nothing special, and simply contains the same inform |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.