The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-01-08 10:52:46 -0500 | received badge | ● Good Question (source) |
| 2018-01-22 17:06:27 -0500 | received badge | ● Great Question (source) |
| 2017-04-24 03:37:37 -0500 | received badge | ● Self-Learner (source) |
| 2016-06-28 09:37:34 -0500 | received badge | ● Good Question (source) |
| 2016-03-09 09:04:00 -0500 | received badge | ● Good Question (source) |
| 2016-03-02 16:46:00 -0500 | received badge | ● Nice Question (source) |
| 2014-09-16 06:25:45 -0500 | received badge | ● Famous Question (source) |
| 2014-07-18 19:16:59 -0500 | received badge | ● Famous Question (source) |
| 2014-06-19 22:39:50 -0500 | received badge | ● Self-Learner (source) |
| 2014-06-19 18:04:47 -0500 | answered a question | Catkin invoke script built in other package I found a few other answers that hint at the solution. This is what I finally came up with that works: I created a file Finally, I added the option |
| 2014-06-19 17:53:55 -0500 | received badge | ● Notable Question (source) |
| 2014-06-16 10:53:38 -0500 | received badge | ● Popular Question (source) |
| 2014-06-15 12:20:18 -0500 | asked a question | Catkin invoke script built in other package I am trying to using These seem to be two separate issues:
|
| 2014-04-20 06:56:55 -0500 | marked best answer | Custom Doxyfile options with rosdoc_lite I would like to enable an input filter in my Doxyfile used when calling rosdoc_lite with the Doxygen backend. There are a few Doxygen customization options listed in the Doxygen builder section of the rosdoc_lite Wiki page, but there doesn't seem to be any way to append arbitrary options to the Doxyfile. Is there any way to get rosdoc_lite to use a custom Doxyfile template? My immediate goal is to enable the Doxypy input filter for Python files. In the future, I also plan to change some of the formatting options. Edit: We're building the documentation myself on an internal server, so it is not a hard requirement for our Doxyfile to work on the ROS build farm. One option is to to add a command-line option to |
| 2014-04-20 06:50:40 -0500 | marked best answer | Using rosdep to install WG maintained stacks I am trying to package some of my robot's stack it's easier to get running on a base installation of ROS-Desktop-Full. In particular, my stack depends on several stacks that aren't installed by default (e.g. I thought |
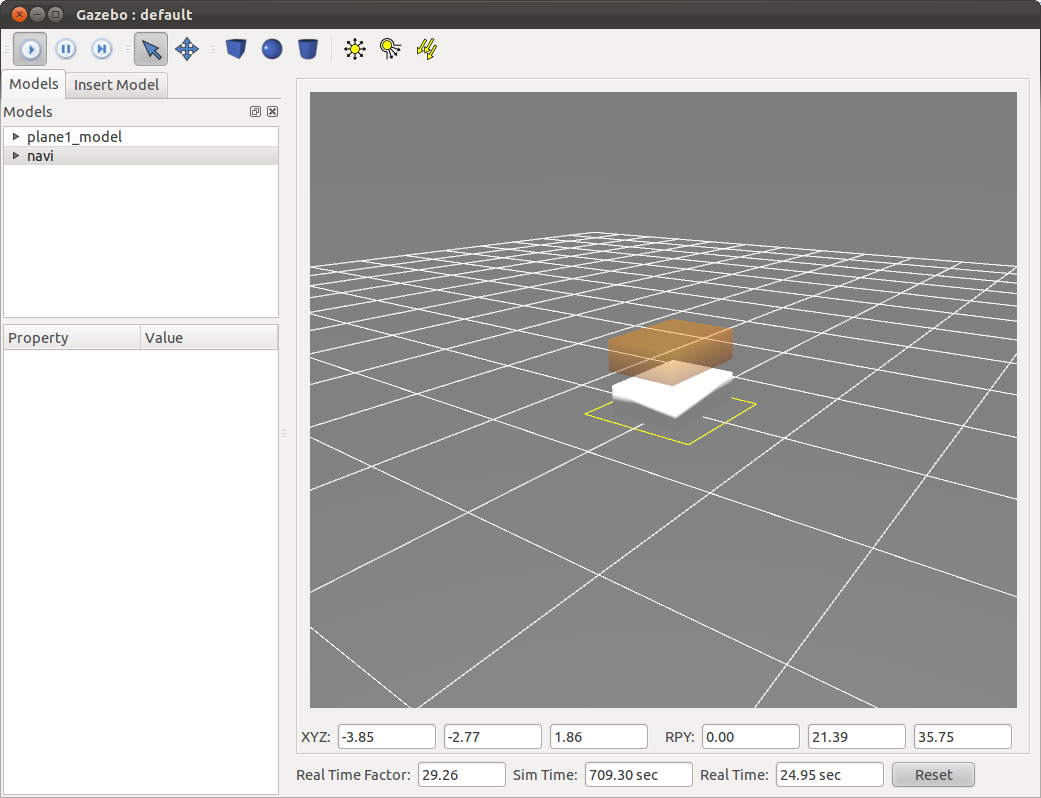
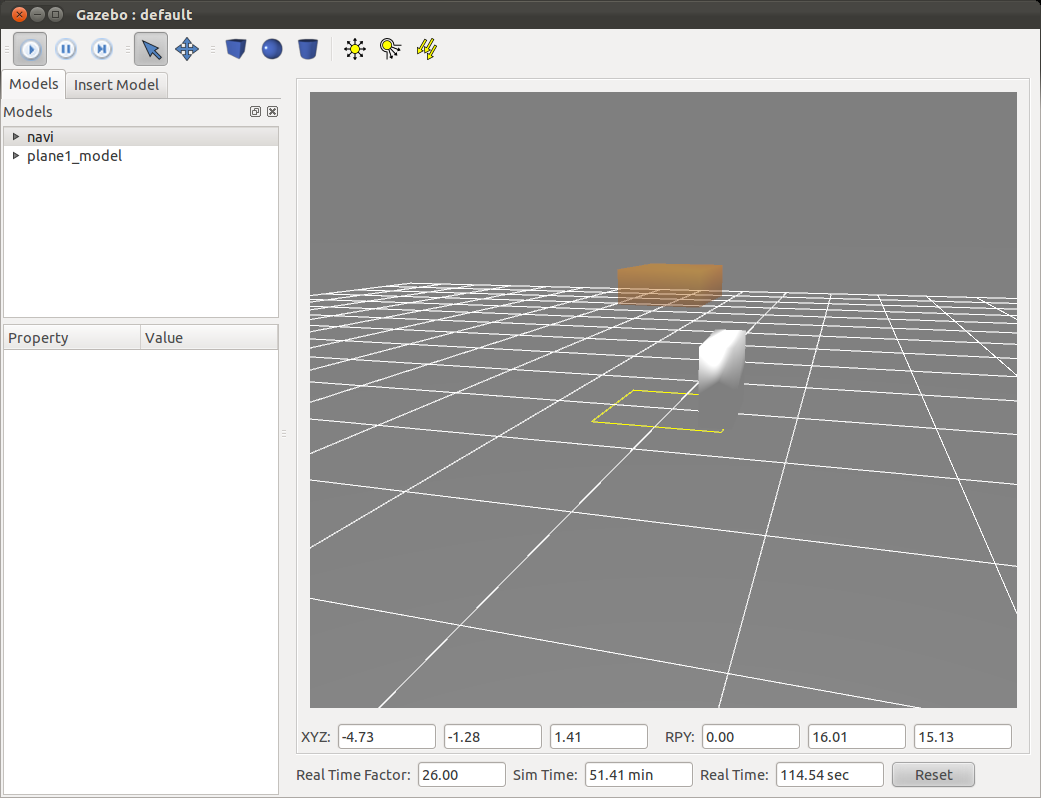
| 2014-04-20 06:50:22 -0500 | marked best answer | Visual and collision geometry misaligned in Gazebo 1.0 I recently updated to fuerte and attempted to simulate the same robot model that I was using in Electric. It is defined in URDF and is loaded using I haven't been able to diagnose the issue, but I have found a minimal example that breaks. Load the following model into Gazebo and view collision geometry. Even though I didn't modify any of the origins in the URDF, there is a huge offset between the two models. This becomes even buggier if you add non-zero I am able to simulate the PR2 fine, e.g. Skeleton URDF Example Screenshot of the Problem in Gazebo (debs)
Screenshot of the Problem in Gazebo (svn)
Edits:
|
| 2014-04-20 06:50:08 -0500 | marked best answer | Contributing packages split across multiple Git repositories I've written quite a few nodes for a custom robot that I've been working on. Several of these nodes are general purpose hardware drivers that would be useful to the larger ROS community. I have been using Git for version control and have a separate repository for each package for several reasons (e.g. to keep separate commit histories, to have more granular control of push access). This leaves me confused as for how to get these packages listed with Wiki pages on ROS.org. Most of the documentation assumes that each person or organization uses one large repository (e.g. "umd-ros-pkg"). One option I was considering was to make an overarching GIt repository that contains the other packages as submodules. What is the preferred method of dealing with this situation? |
| 2014-04-20 06:47:53 -0500 | marked best answer | PNI Digital Compass Driver I've recently acquired a PNI Fieldforce TCM-XB and would like to interface it with ROS. It communicates over serial using a binary protocol described in their datasheet. The protocol appears to be proprietary, but I am not familiar enough with the protocols used by other manufacturers to know for sure. Basic searches in the ROS package database haven't turned up any existing packages. Before I take the time to write one, has anyone else written a ROS node for communicating with this compass? Update: It's not completely polished, but here is the fieldforce_tcm node that I wrote. It is written in Python and publishes a |
| 2014-04-20 06:47:51 -0500 | marked best answer | TF Frame Convention for Stereo Cameras I am using a stereo camera for both stereo reconstruction and monocular image processing. Since I am not calibrating the pair of cameras twice, I am doing all of the monocular processing using the stereo calibration parameters. For the camera intrinsics, this works fine. I am not sure how to handle the extrinsics. I would like to have the left and right cameras in different TF frames that correspond to their positions on my robot (e.g. What is the correct way to set the |
| 2014-04-20 06:47:41 -0500 | marked best answer | Parent TF frame in camera_pose_calibration The individual calibrations are correct, but the Is there any way I can save the transformation between the cameras without including the If I was calibrating three cameras (
Because the world frame is arbitrary and differs between the two calibrations, there are two conflicting transforms from
I don't think this would cause any problems with multiple-camera calibration, either: all of the transforms could be published as children of the first camera. |
| 2014-04-20 06:47:40 -0500 | marked best answer | rosbag keyboard controls unresponsive I have been using Stepping through the data is important for evaluating my nodes, so this has been very frustrating. Has anyone found a workaround for this problem? |
| 2014-04-20 06:47:38 -0500 | marked best answer | "Recursive Print Statement" with Nodelets I have recently converted a few of my nodes to nodelets to take advantage of zero-copy message passing. Even though I have converted all of the standard ROS logging macros (e.g.
After this message prints it appears that the logging macros cease to function. Has anyone else encountered this message when using nodelets? How can I fix it? |
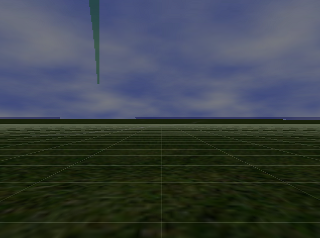
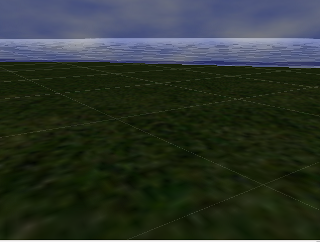
| 2014-04-20 06:47:32 -0500 | marked best answer | Incorrect camera extrinsics for simulated Gazebo cameras I am simulating several cameras in Gazebo using the When I view frames captured from the simulated cameras, it is clear that they are pointing in roughly the correct direction. If I view the simulated world in RViz, the visualized world renders correctly for horizontal cameras (left), but not for cameras with a non-zero pitch (right):
It appears that the images captured in Gazebo have approximately twice the pitch that is specified in the URDF (note how the ground plane projected by RViz is too high in the right image). Has anyone else run into a similar problem? |
| 2014-03-24 03:35:33 -0500 | received badge | ● Notable Question (source) |
| 2014-03-12 06:19:40 -0500 | commented answer | Bloom - "Could not resolve rosdep key 'message_runtime'" @William Thanks! I'll send you a pull request if I figure out a better way of handling this use-case. |
| 2014-03-11 11:54:27 -0500 | marked best answer | Bloom - "Could not resolve rosdep key 'message_runtime'" I am trying to build a package in a private Bloom repository with I tried following the answer to a similar question from 2012: This did not change anything. I repeated the above with the latest versions of rosdep and Bloom in the Ubuntu APT repository ( Interestingly, it looks like the "hydro" line added in 09e4ae3ff3e8e81408127582c4b260718c679f6 was recently removed in 5e4a02a408361241a7158361ea2b228b08c0c671. This comment was added in its place: Unfortunately, this does not seem to be the case. I can't This happens even if I am in a shell that freshly sourced Any suggestions? Edit 1: Running Edit 2: To outline our use-case in a bit more detail: We use ROS extensively across two robots---one robotic arm and one dual-arm mobile manipulator---and have accumulated a large collection of internal ROS packages. Most of our packages are open-source, but we have some hard constraints that prevent us from open-sourcing everything (e.g. includes on commercial/proprietary software, sponsor has IP restrictions, software associated with papers that are under peer review, etc). We've been building Debians of our dry Fuerte packages with a custom Jenkins setup and are finally upgrading to Indigo. Our plan is to switch to Bloom to manage releases and a (potentially heavily modified) version of buildbot-ros as our internal build server. Edit 3: See our discussion on @tfoote's comment below for the solution we arrived at. |
| 2014-03-11 11:54:26 -0500 | commented answer | Bloom - "Could not resolve rosdep key 'message_runtime'" I now see that Bloom generates a patch file in /tmp with an auto-generated filename. Is there any way to control where the patch file is written? Or to query where the file was saved? The best options I can come up with are to either fork Bloom or grep its output for the log message. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.