The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-06-29 06:28:12 -0500 | received badge | ● Famous Question (source) |
| 2016-04-29 04:09:27 -0500 | received badge | ● Taxonomist |
| 2015-10-26 04:04:25 -0500 | received badge | ● Popular Question (source) |
| 2015-10-26 04:04:25 -0500 | received badge | ● Notable Question (source) |
| 2015-09-18 18:41:41 -0500 | marked best answer | Unable to install gazebo 1.2 Hello to all My actual gazebo-version (1.02) cant open any .urdf-file correctly. The terminal shows following:
And the urdf object is not visible. So I guessed i have to install gazebo 1.2. By using
the terminal shows:
How can I solve this problem? |
| 2015-09-11 15:19:53 -0500 | marked best answer | Motion Planing Library + Visualization-App for 6 axis robots? Hello together, is there any Motion Planing Library + Visualization-App for 6 axis robots out there in the Ros-Universe? Thanks in advance Dominik |
| 2015-08-31 20:13:28 -0500 | received badge | ● Popular Question (source) |
| 2015-06-22 00:37:26 -0500 | marked best answer | ompl ignores collision Hello to all I builded a package of my Robot (Sträubli TX60L) with the "planning_description_configuration_wizard". Unfortunately the robotarm hits every obstacle on his trajectory (Whether "Planning Components Visualizer" (Obstacles = Poles) or Warehouse Viewer (Obstacles = Boxes)). parameter dialog of the "warehouse viewer": (http://img198.imageshack.us/img198/7429/planningscenewarehousev.png) Edit: A collsion-.stl-file: (https://www.rapidshare.com/#!download|539|1254634200|at5_col.stl|1) Edit: my "Rviz" can only display binary .stl-files, but assimp can only display ASCII stl-files! I think the problem is the prepended "solid" in my .stl-files like in this threat mentioned:(http://answers.ros.org/question/11569/planning_component_visualizer-bug/) So I also opened my .stl files with wordpad and changed the prepended "solid" to "robot". But now my rviz crashes like in the previous mentioned threat: Solved: Finally ;) Many Thanks to all supportes, especially yangyangcv. The problem as suggested was the prepended "solid" in the binary .stl-files. It was a bug of pro-engineer. When exporting a non .stl file to a binary .stl pro/e put falsely this "solid" at the beginning, which actually introduces a ascii-.stl-file. Thats the reason why assimp cant open them. After importing and exporting my broken .stl files in Meshlab the solid was taken out and everything worked. Many Thanks in advance Dominik |
| 2015-06-22 00:23:34 -0500 | marked best answer | invisible mesh in gazebo Hello, I build up an .urdf-file which can be correctly loaded in rviz. The Geometry is defined by meshes. When I load it in Gazebo the Robot is invisible. The Terminal shows no failure-messages except the warning that urdf will not be any longer supported (this was discussed in a different threat and seems to be unimportant). I simplified my .urdf file to one link to exclude possible problems: The box-example from the gazebo-tutorial can be displayed correctly. Any Suggestions how to get my model visible? Have I to deliver additional Informations? Many Thanks in advance Dominik |
| 2015-04-23 03:23:19 -0500 | marked best answer | problem with making package - file not found Hello to all the command: occurs following failures: What should i do? Many Thanks in advance Dominik |
| 2014-10-18 10:59:51 -0500 | received badge | ● Good Question (source) |
| 2014-10-06 16:19:08 -0500 | received badge | ● Famous Question (source) |
| 2014-07-23 14:11:32 -0500 | received badge | ● Famous Question (source) |
| 2014-05-06 22:07:11 -0500 | received badge | ● Notable Question (source) |
| 2014-01-28 17:30:14 -0500 | marked best answer | How to use SBPL for Benchmarking? Hello, I already executed some succesfull benchmark-runs with ompl planners. (ROS GROOVY) Now I want to repeat the same with the sbpl_arm planner. My SBPL-benchmark server .launch file: my guessed sbpl_planning.yaml-file (I orientaded at the ompl_planning.yaml-file) edit: when I start my .launch-file Terminal shows following: Why is the benchmark_server assuming that I use OMPL? How can I fix it? Edit: Here is a paper, where sbpl - benmarking is realized in MoveIt! Edit: Here are my MoveIt! configuration files. And my 6Dof_robot. Many Thanks in advance viovio |
| 2014-01-28 17:29:56 -0500 | marked best answer | Can't find moveit_benchmark_statistics.py Hello, I want to create a pdf of my benchmark.log-file by using following command: But: I've installed the newest version of moveit. How can I make it work? Thx in advance viovio |
| 2014-01-28 17:29:44 -0500 | marked best answer | How can I use the "joint_state_publisher"-GUI ? Hello everybody, I'm using the Rviz MoveIt Plugin for my 6 Dof - Robot. I created the necessary package via "Moveit Setup Assistant". Unfortunately the interactive markers don’t show up. (see this threat) So I started the Joint_State_Publisher with the "GUI"-parameter on true. But the slide controls have no influence on my robot. But it shows exactly 5 slide controls for my 5 joints, as described in my urdf. Questions:
Sorry but I'm a quiet newby at this stuff. What information do you need in order to help me? Many Thanks in advance viovio |
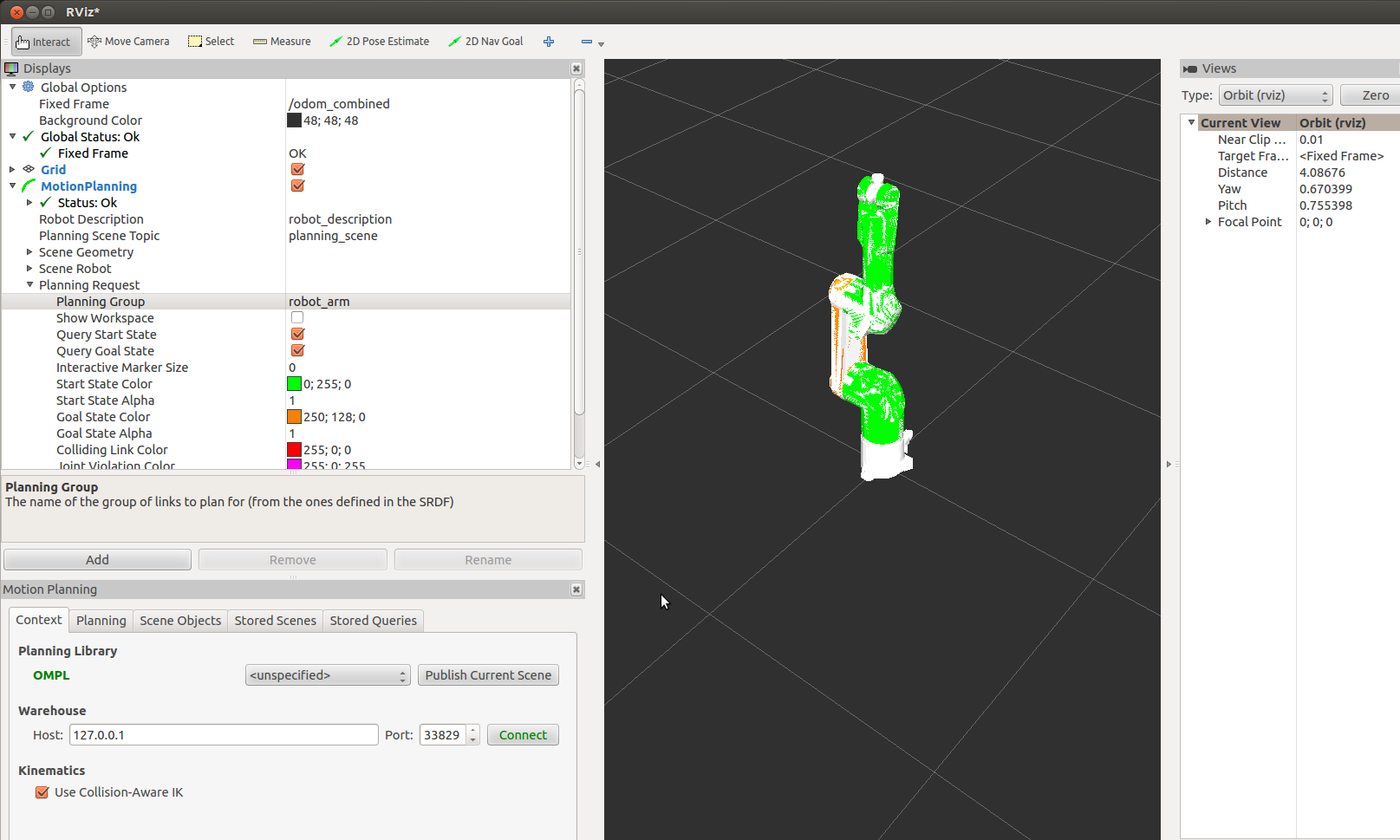
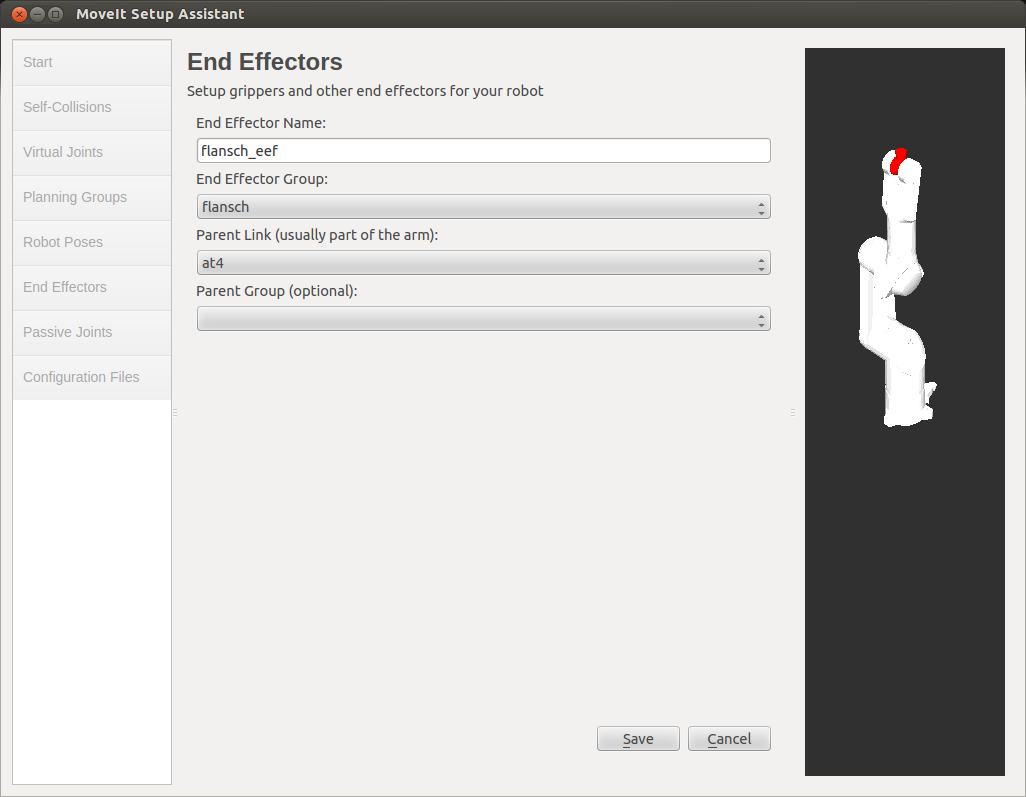
| 2014-01-28 17:29:41 -0500 | marked best answer | MoveIt! Rviz Plugin - No interactive markers visible/available Hello to all, I created a Robot-Config via MoveIt! Setup Assistant. The Robot is a simple 6 Dof Robot. When I start it with the Rviz Moveit Plugin the interactive markers are not displayed. (After I click on "Interact"). I suspect the End-Effector is not correctly set by me. RVIZ:
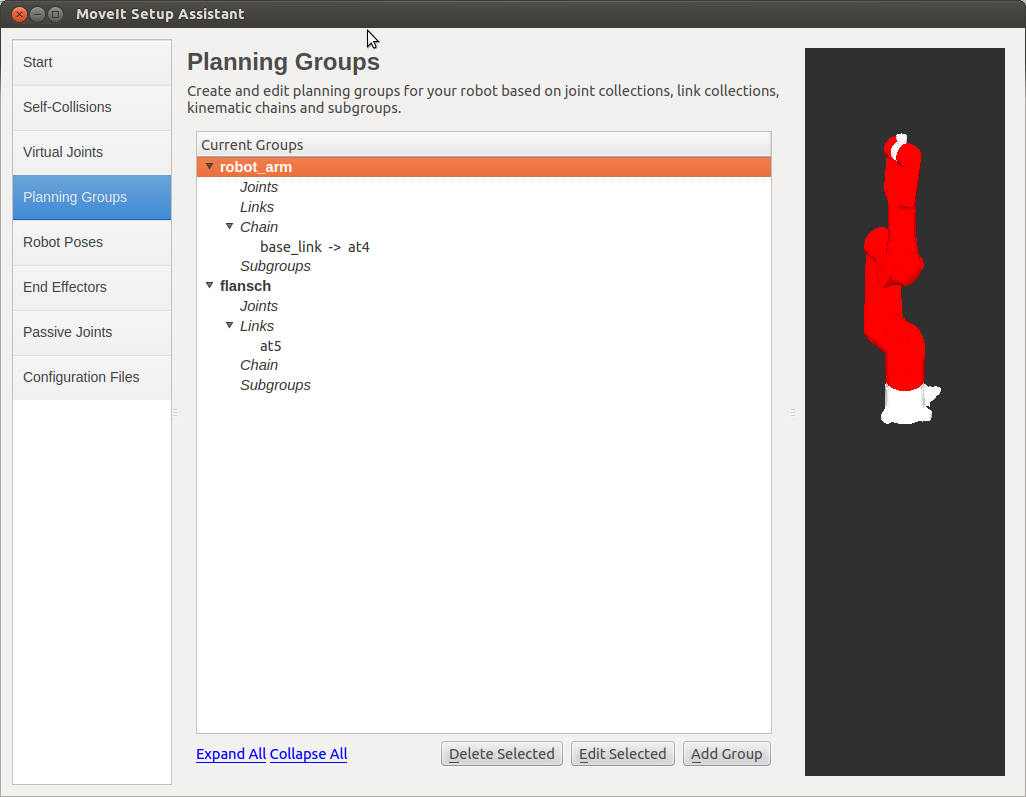
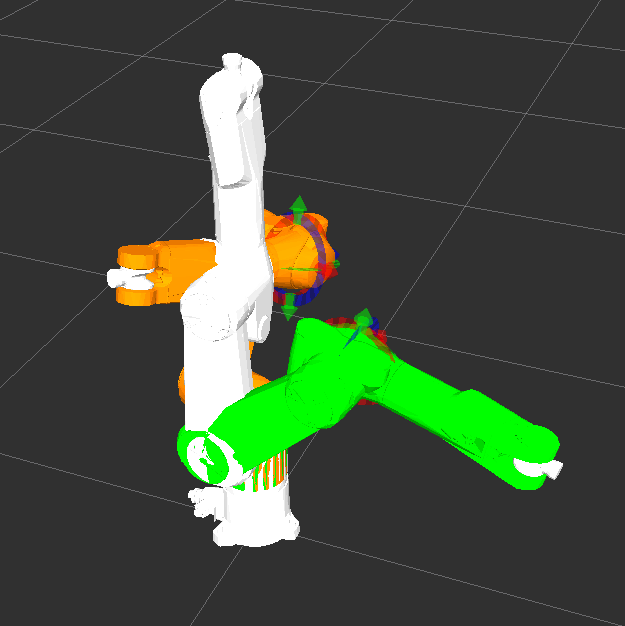
Screenshots of the MoveIt Setup Assistant: 1. 2. I set for both plannings groups the "KDLKinematicsPlugin" as Solver on default values. I followed this tutorial for the pr2-robot. My .launch-file:Edit (no gazebo-part in urdf): See here the Terminal-Output. Info: Removing and adding "MotionPlanning" inside Rviz didn't help. Edit (working Links): Here you can download my robot-description. Here you can download my urdf-folder. Update: If I set the "fixed_frame" to a link of the robot itself, interactive markers for joint a4 show up. (See picture below) But I need interactive markers in joint5. If I let "fixed_frame" set on "base_footprint" or "odom_combined" (as it should be, I think) and "plan and execute" for a random query MoveIt! crashes (output)
Update: Now the interactive markers work correctly. Many Thanks to all supporters. viovio |
| 2014-01-28 17:29:05 -0500 | marked best answer | MoveIt Rviz "No planning library loaded" Hello to all, after finishing the "MoveIt! Setup Assistant" for my tx60l-robot I tried to start the rviz moveit plugin with following command: Rviz starts, but there is no robot visible. The "moveit_rviz.launch"-file generated by the "MoveIt! Setup Assistant": There is no reference on my .urdf-file I used for the MoveIt! Setup Assistant" ! -> no robot can be displayed Though this instruction shows a different kind of .launch-file (using pr2-robot): My new launch file: upload_tx60l.launch: Edit: With my new launch-file Rviz starts finally. Obviously all nodes are loaded by the Moveit Assistant generated launch file (Though I cant detect them in there) After starting Rviz I add "MotionPlanning" like described in this tutorial. Now my Robot is visible But there is the hint: "no planning library loaded". Have I to start Rviz with an additional parameter which defines the used planning library? Also I cant select any "Planning Group"! How can I solve that? Or what information are relevant to help me? Edit: Now the OMPL is loaded, thx to Boris. But I dont get any interactive marker (is there a different way to set robot-poses?) for my robot-arm when I click on "Interact". When I load the pr2-demo it works. So the failure has to be hidden in my robot-config created with the "Setup Assistant". Is it because I didnt have defined an End-Effector? Edit: Dave told me the problem is the end-effector. But I still cant solve it. I already tried all combinations. My robot is a simple arm of 6 links connected by 5 joints. I put all joints in one "arm-group" and the last link (link6) in another group called "end" but with no ki-solver, because its only one link. I think that's similar to this tutorial. Then I added an end-effector with the end-effector-group "end" and the parent link link 5. But there is still no interactive markers visible. What am I doing wrong? Many Thanks in advance viovio |
| 2014-01-28 17:27:17 -0500 | marked best answer | invisible links in rviz Hello to all, when I start Rviz with following .udfr - file: Nothing is shown in the camera-view but the grid. The STL-Files were exported in Binary. There are none failure-messages while starting rviz or inside of it. First i suggested the .stl - files are invisible, so I added the material-tag. Any Suggestions why my camera-view is blank? Many Thanks in advance Dominik edit: @Lorenz I tried to open my urdf file seperately in rviz und gazebo. For rviz I followed the rviz-tutorial. It was possible to load the urdf-file which you are suposed to build in this tutorial. I only exchanged the simple geometry with the meshes. At the end of the tutorial also a mesh is used (though a dae-file). update to gazebo: I was able to load the urdf file in gazebo, but it is invisible like in rviz. Also the links of the urdf file are not shown in the tree. |
| 2014-01-28 17:27:10 -0500 | marked best answer | erros in eclipse C++ by opening file from ros tutorial Hello to all, when i open the add_two_ints_server.cpp from this tutorial with my C++ Eclipse Editor following failures are shown: What file or dependency is eclipse missing? Or are that failures with multiple origins? edit: I followed this IDE-Tutorial. At step "1. Reusing your shell's environment", i build an new ros-package and copied the "c++ eclipse" files in it. Then I created a launch folder and file and pasted following: By using the command "roslaunch eclipse2 eclipse.launch" I started C++ - Eclipse. (Eclipse starts with some warnings of missing log-files) But these failures are still there. Also I follwed the other steps of the tutorial. Any Suggestions? Many Thanks in advance Dominik |
| 2013-11-20 09:52:19 -0500 | received badge | ● Notable Question (source) |
| 2013-10-08 14:00:09 -0500 | received badge | ● Famous Question (source) |
| 2013-10-03 09:04:14 -0500 | received badge | ● Famous Question (source) |
| 2013-07-24 06:54:27 -0500 | received badge | ● Notable Question (source) |
| 2013-07-24 06:54:27 -0500 | received badge | ● Popular Question (source) |
| 2013-07-18 03:44:47 -0500 | marked best answer | "No ROS_WORKSPACE set" - Problem Hello, I want to use roscd inside of my ros_workspace, without typing:
at first. In this tutorial is written:
I suspect that this sentence is the solution. Due to English is not my Motherlanguage I just dont get it what to do in order to use roscd instantly for all packages inside of my fuerte_workspace. Can someone please give me an exact instruction to reach my goal? Thanks in advance Dominik |
| 2013-07-07 18:47:58 -0500 | received badge | ● Nice Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.