The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-10-12 04:38:01 -0500 | marked best answer | Getting a warning upon launch on different PCs Hi all, I have recently migrated from Kinetic and/or Indigo to Melodic, using Ubuntu 18. My codes work fine but I keep getting the same message about a dozen times when launching a launch file: It repeats for about a dozen times after launching, but does not seem to effect the runtime. I just find it strange that this happens on 3 different computers with different launch files / nodes, and I can't find a thing on the internet. Not sure which node causes this, I can check, but maybe someone here knows about a setting I might be able to change to get rid of this. Blessings, Steve |
| 2021-12-01 03:41:56 -0500 | marked best answer | Changing Rviz item properties on-the-fly Hi all, Lets say I have a project involving Rviz and some display types, say, a PointCloud2 I'm listening to. If I wanted to change the cloud coloring, shpere size, or topic, for example, but through a command from within a node and/or an rqt gui incorporating Rviz, what would I be looking for? Is it dynamic reconfigure or are there more / other ways of doing so? I'm just looking for a short pointing in the right direction, I would greatly appreciate it because I can't seem to find the correct keyword for this. Many thanks, Steve |
| 2021-06-22 02:29:46 -0500 | received badge | ● Nice Answer (source) |
| 2021-04-25 04:40:34 -0500 | received badge | ● Famous Question (source) |
| 2021-04-20 01:33:00 -0500 | edited question | Recording only a single message instance Recording only a single message instance Hi all, I need to save some metadata about my recording session (e.g. camera i |
| 2021-04-20 01:32:22 -0500 | asked a question | Recording only a single message instance Recording only a single message instance Hi all, I need to save some metadata about my recording session (e.g. camera i |
| 2019-12-17 16:01:07 -0500 | received badge | ● Famous Question (source) |
| 2019-12-17 16:01:07 -0500 | received badge | ● Notable Question (source) |
| 2019-12-05 18:32:17 -0500 | received badge | ● Notable Question (source) |
| 2019-12-05 18:32:17 -0500 | received badge | ● Famous Question (source) |
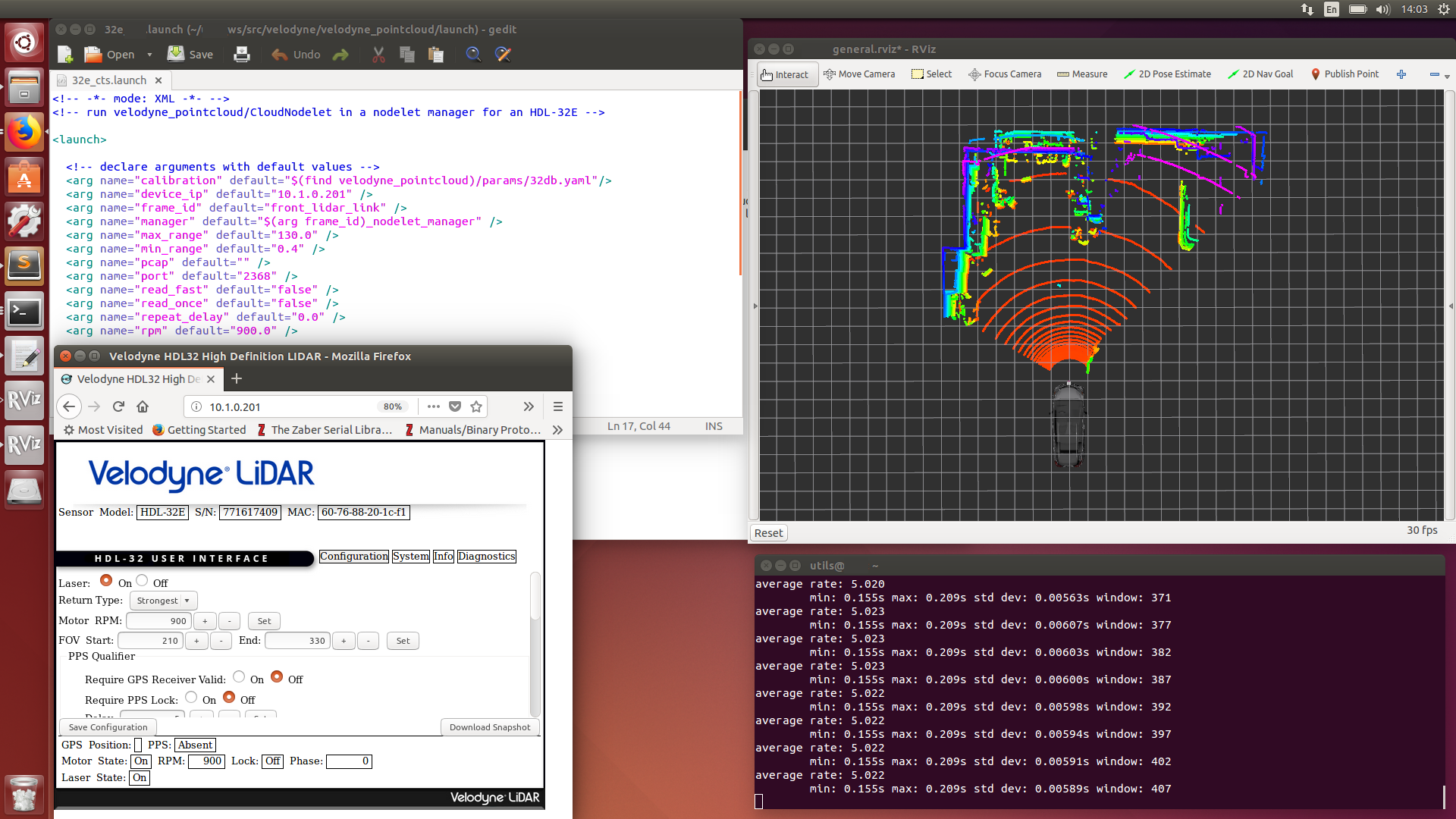
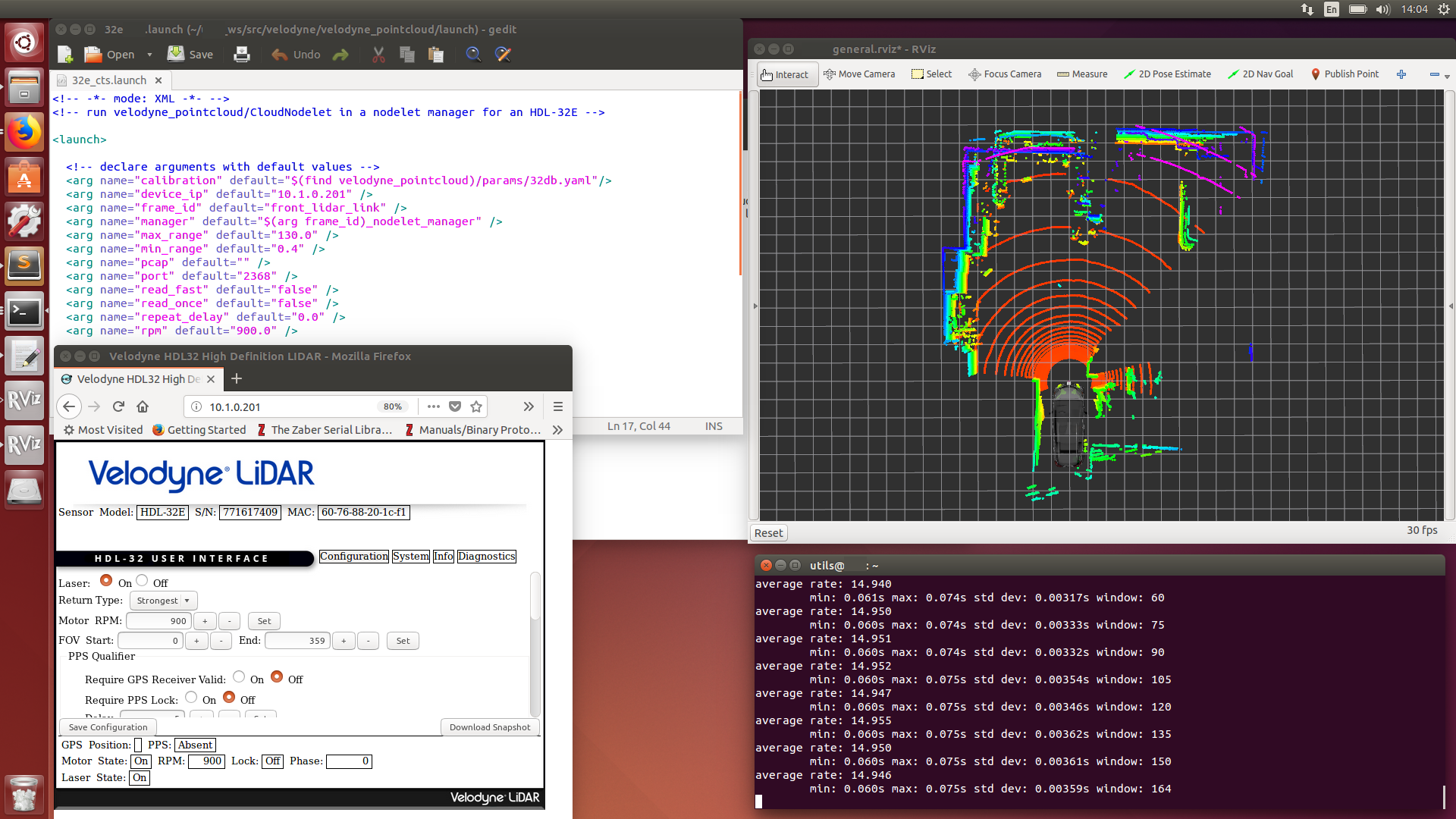
| 2019-11-26 09:52:57 -0500 | marked best answer | Velodyne HDL32 FPS issue Hi Pals, I've been using the latest velodyne package in order to receive data from the HDL-32E. I am using ubuntu 14.04.5 with a ROS indigo installation. The driver mostly works fine, getting the desired 15Hz on a 900 RPM lidar rotation (and respectfully other Hz corresponding to other RPMs). This was checked via "rostopiz hz". Using the Lidar on it's regular configuration generates ~50k points per frame, which is too much for me, especially considering I only need the front +-60 degrees (120 deg in total, which is a third of the whole 360 deg sweep). So I put that information into the corresponding slots inside the lidar's web GUI (you can choose the desired sweep angle), and I do get the desired sweep when I look in Rviz. Now for the problem: I get the same amount of points per message, with the messages coming in at 1/3rd of the rate. The lidar is accumulating points for 3 revolutions and then publishing 1 message. Tests I've made show that this is probably a driver issue and not hardware. I found no parameter to change that might affect this behavior. Here are some screenshots, with the Rviz, launch file, and velodyne web gui open. Note that for full 360deg you get 15 fps, on a 120deg fan you get 5 fps (360/3->15/3), and on a 72deg fan you get 3 fps. https://drive.google.com/open?id=1m0C.. . https://drive.google.com/open?id=12B6.. . https://drive.google.com/open?id=1qy8.. . If anyone ever tried to limit the sweep before and get it to work, I'de love to hear. Thanks in advance, Steve EDIT: adding pics directly. Firefox gave me trouble for some reason
|
| 2019-08-06 11:06:09 -0500 | received badge | ● Famous Question (source) |
| 2019-07-02 16:50:04 -0500 | received badge | ● Famous Question (source) |
| 2019-05-24 11:18:15 -0500 | received badge | ● Famous Question (source) |
| 2019-05-24 02:50:24 -0500 | received badge | ● Notable Question (source) |
| 2019-04-10 12:28:42 -0500 | received badge | ● Famous Question (source) |
| 2019-04-05 16:18:06 -0500 | received badge | ● Famous Question (source) |
| 2019-04-01 12:59:56 -0500 | received badge | ● Famous Question (source) |
| 2019-04-01 12:59:56 -0500 | received badge | ● Notable Question (source) |
| 2019-04-01 09:48:08 -0500 | commented question | Getting a warning upon launch on different PCs I have run into this myself but having the solutions not working I deemed it coincidental. I eventually found out the re |
| 2019-04-01 03:13:40 -0500 | received badge | ● Popular Question (source) |
| 2019-04-01 02:27:12 -0500 | received badge | ● Popular Question (source) |
| 2019-03-31 09:23:01 -0500 | edited question | Getting a warning upon launch on different PCs Getting the same warning on launch Hi all, I have recently migrated from Kinetic and/or Indigo to Melodic, using Ubuntu |
| 2019-03-31 09:17:30 -0500 | asked a question | Getting a warning upon launch on different PCs Getting the same warning on launch Hi all, I have recently migrated from Kinetic and/or Indigo to Melodic, using Ubuntu |
| 2019-03-06 03:50:45 -0500 | asked a question | Rviz crashes on "ROS time moved backwards" Rviz crashes on "ROS time moved backwards" Hi all, I am using ubuntu 14.04 with ros indigo. I am running rosbag play wit |
| 2019-03-01 12:21:00 -0500 | received badge | ● Famous Question (source) |
| 2019-01-17 01:56:07 -0500 | received badge | ● Notable Question (source) |
| 2019-01-17 01:48:13 -0500 | commented question | Rviz panel won't open gvdhoorn, I mean the my_configuraion.cfg file, which is placed inside my package folder instead of ~/.rviz Dyson spher |
| 2019-01-16 09:00:23 -0500 | received badge | ● Popular Question (source) |
| 2019-01-16 05:52:25 -0500 | received badge | ● Associate Editor (source) |
| 2019-01-16 05:52:25 -0500 | edited question | Rviz panel won't open Rviz panel won't open Hi all, This might seem like a silly question but similar issues are probably shadowing my keywor |
| 2019-01-16 05:50:40 -0500 | asked a question | Rviz panel won't open Rviz panel won't open Hi all, This might seem like a silly question but similar issues are probably shadowing my keywor |
| 2018-12-16 21:05:36 -0500 | received badge | ● Self-Learner (source) |
| 2018-12-16 20:56:29 -0500 | received badge | ● Popular Question (source) |
| 2018-12-08 12:32:18 -0500 | commented answer | Astra Pro registered point cloud One time I did that and someone stated that I should write a comment instead... not really enough space for that. Thanks |
| 2018-12-08 12:31:00 -0500 | edited answer | Astra Pro registered point cloud Sorry to be answering my own question but I found the solution, and in the absence of other instructions I want to make |
| 2018-12-08 09:30:21 -0500 | edited answer | Astra Pro registered point cloud Sorry to be answering my own question but I found the solution, and in the absence of other instructions I want to make |
| 2018-12-08 09:20:50 -0500 | edited answer | Astra Pro registered point cloud Sorry to be answering my own question but I found the solution, and in the absence of other instructions I want to make |
| 2018-12-08 08:59:34 -0500 | edited answer | Astra Pro registered point cloud Sorry to be answering my own question but I found the solution (at least partially), and in the absence of other instruc |
| 2018-12-08 08:59:02 -0500 | answered a question | Astra Pro registered point cloud Sorry to be answering my own question but I found the solution (at least partially), and in the absence of other instruc |
| 2018-12-07 06:49:28 -0500 | asked a question | Astra Pro registered point cloud Astra Pro registered point cloud Hi all. I am using Ubuntu 16.04 with ROS kinetic. Fresh install with upgrades for both. |
| 2018-11-27 23:28:50 -0500 | marked best answer | Importing custom messages from other packages in Python Hi all, I've been on this for hours now and I can't figure it out. It seems as if not this forum or the tutorials have a solution for this simple question.
I have downloaded the Vesc stack here, without the I have a standard python node code, but it starts with: I have tried every conceivable way of doing this. i have tried to rename the message files, adding them as native messages to my package, including all the I actually do not want to make these messages native anyway. what I do want is to get my Why can I use every single message offered by ROS ( Thanks in advance, Steve |
| 2018-11-13 02:40:04 -0500 | commented question | Velodyne VLP32-C scaling issue Sorry for the (very) late response. I will try to fcilitate the solution in your link. Thanks! |
| 2018-11-13 02:39:16 -0500 | received badge | ● Popular Question (source) |
| 2018-11-13 02:39:16 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.