The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-09-05 20:14:15 -0500 | received badge | ● Famous Question (source) |
| 2021-04-22 06:31:31 -0500 | received badge | ● Famous Question (source) |
| 2021-03-14 23:21:06 -0500 | received badge | ● Notable Question (source) |
| 2021-03-14 23:21:06 -0500 | received badge | ● Popular Question (source) |
| 2020-02-18 06:03:16 -0500 | received badge | ● Famous Question (source) |
| 2020-01-26 19:41:52 -0500 | received badge | ● Notable Question (source) |
| 2019-12-14 07:18:20 -0500 | received badge | ● Famous Question (source) |
| 2019-12-14 07:18:20 -0500 | received badge | ● Popular Question (source) |
| 2019-12-14 07:18:20 -0500 | received badge | ● Notable Question (source) |
| 2019-05-20 02:18:10 -0500 | marked best answer | Octomap in moveit I already can see octomap in rviz but the problem is the octomap is quite different from the real world kinect sees. I don't know why. Do I need to adjust any parameter for configuration file?
Besides, the refresh rate is quite low. Anybody know how to change refresh rate of octomap?
Thanks for any suggestion.
|
| 2019-05-20 01:38:57 -0500 | marked best answer | tf between pointcloud and world frame Dear all, Instead of using freenect_launch package, I published all depth_image_proc required images and infos by myself and successfully generated pointcloud since I can echo specified topic and it did have response. The problem right now is when I want to use pointcloud to generate actomap in moveit, I assume since I lose the tf between pointcloud and world, the message will always drop. But because I don't know what frame name of pointcloud, I don't know what I should write down when I launch tf publisher. Any idea for how to get the frame name of my pointcloud? Thanks in advance for any help. |
| 2019-05-13 21:53:00 -0500 | received badge | ● Notable Question (source) |
| 2019-03-05 14:56:58 -0500 | marked best answer | CvBridge: depth registration for depth and rgb opencv images and convert to ros image msg What I want to do basically is publishing depth_registred image on topic. I already have opencv depth and rgb images and the transformation between them. I wonder should I finish depth registration first and then use CvBridge to convert it to ros image msg or convert depth and rgb images to two ros image msgs and finish depth registration? I have tried the first way but I am stuck at the step of converting to ros image msg since I can't find specific encoding for RGBD image. Thanks in advance for any suggestion. |
| 2019-01-21 02:23:03 -0500 | received badge | ● Famous Question (source) |
| 2018-11-08 06:19:53 -0500 | received badge | ● Popular Question (source) |
| 2018-11-08 06:19:53 -0500 | received badge | ● Notable Question (source) |
| 2018-10-03 07:35:07 -0500 | received badge | ● Notable Question (source) |
| 2018-10-03 07:35:07 -0500 | received badge | ● Famous Question (source) |
| 2018-09-14 10:11:32 -0500 | received badge | ● Famous Question (source) |
| 2018-09-14 10:11:32 -0500 | received badge | ● Notable Question (source) |
| 2018-08-24 06:28:02 -0500 | received badge | ● Notable Question (source) |
| 2018-08-24 04:07:29 -0500 | received badge | ● Famous Question (source) |
| 2018-08-08 01:29:27 -0500 | marked best answer | try to build source moveit with source installed ompl I am trying to introduce one new planner to my ompl. This is the reason that I need to install source ompl. I successfully built source ompl but failed when I tried to build moveit. Here is my reuslt of catkin build. Anybody has the similar problem? |
| 2018-07-12 13:18:22 -0500 | received badge | ● Famous Question (source) |
| 2018-07-12 13:18:22 -0500 | received badge | ● Notable Question (source) |
| 2018-07-10 22:02:52 -0500 | received badge | ● Famous Question (source) |
| 2018-06-09 10:07:55 -0500 | received badge | ● Famous Question (source) |
| 2018-06-09 10:07:55 -0500 | received badge | ● Notable Question (source) |
| 2018-06-09 10:07:55 -0500 | received badge | ● Popular Question (source) |
| 2018-05-27 03:59:35 -0500 | received badge | ● Popular Question (source) |
| 2018-05-27 03:59:35 -0500 | received badge | ● Notable Question (source) |
| 2018-05-23 04:29:44 -0500 | received badge | ● Famous Question (source) |
| 2018-05-11 19:37:32 -0500 | received badge | ● Famous Question (source) |
| 2018-04-24 06:24:11 -0500 | received badge | ● Famous Question (source) |
| 2018-04-20 13:23:00 -0500 | commented answer | robot arm is broken link by link in gazebo I add friction in the link element and gripper moves as I want. |
| 2018-04-20 13:11:59 -0500 | commented answer | robot arm is broken link by link in gazebo I think I am close to success now. I implemented controller and it works fine. The only problem right now is the passive |
| 2018-04-18 04:16:19 -0500 | received badge | ● Famous Question (source) |
| 2018-04-17 09:02:44 -0500 | received badge | ● Notable Question (source) |
| 2018-04-13 13:17:27 -0500 | commented answer | robot arm is broken link by link in gazebo According to the pic I posted, nonconcentric problem still exists. Is that because the origin of the joint coordinate is |
| 2018-04-13 13:16:36 -0500 | commented answer | robot arm is broken link by link in gazebo I turned selfcollide into true and it works. What made me think that problem is not because of selfcollide is during fal |
| 2018-04-13 12:27:54 -0500 | edited question | robot arm is broken link by link in gazebo robot arm is broken link by link in gazebo Hi all, I have succeeded loading my designed robot arm in rviz and finished |
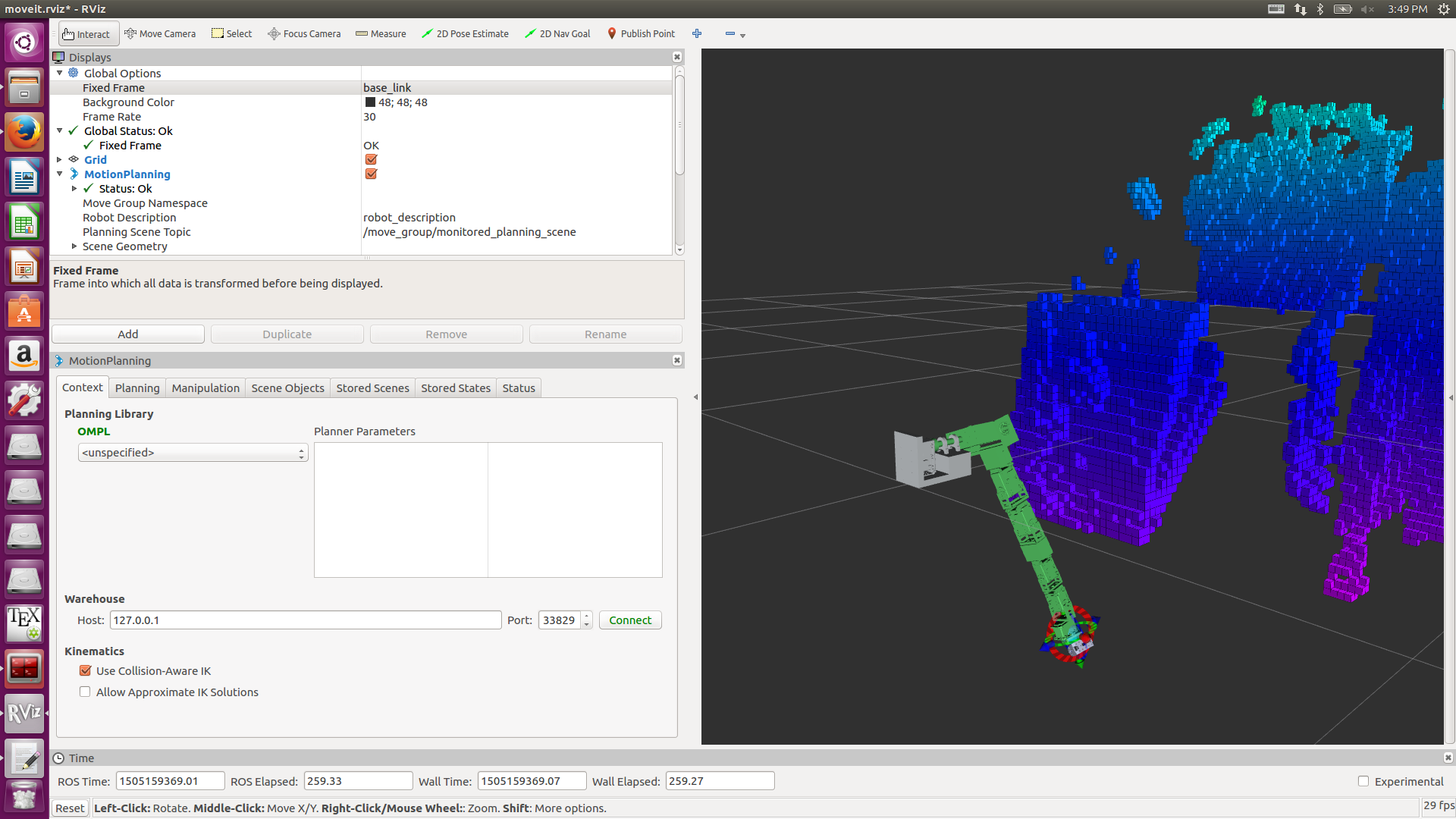
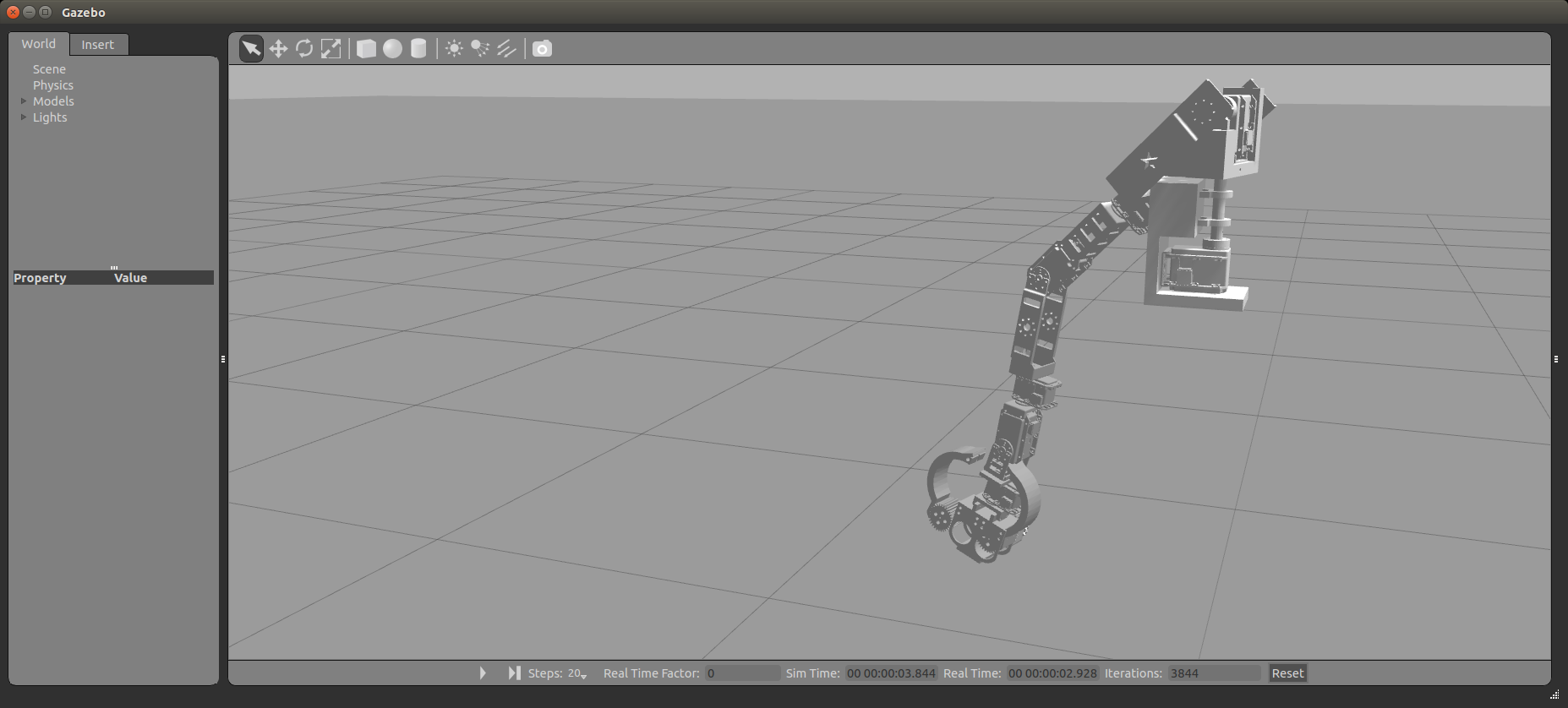
| 2018-04-13 12:26:42 -0500 | marked best answer | robot arm is broken link by link in gazebo Hi all, I have succeeded loading my designed robot arm in rviz and finished planning and executing. Right now I want to use load kinect to get some simulated data for robot arm. Hence I am trying to load urdf file in gazebo. The problem is my robot arm is broken link by link. It seems joint element in urdf doesn't work. I followed the tutorial of urdf in gazebo and added friction and damping in the urdf. I am not sure where I got wrong. Thanks in advance for any suggestions. Here is the pic that robot arm in the rviz
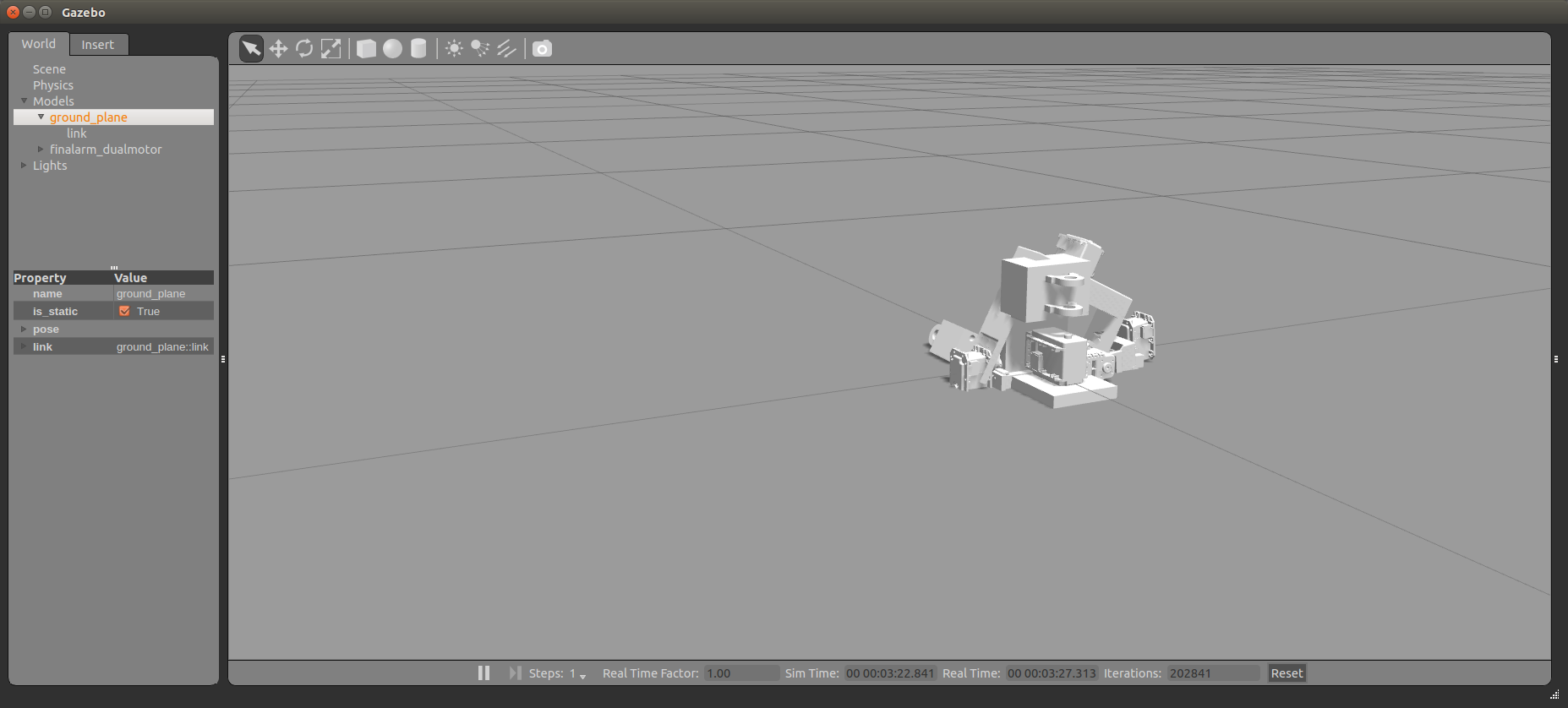
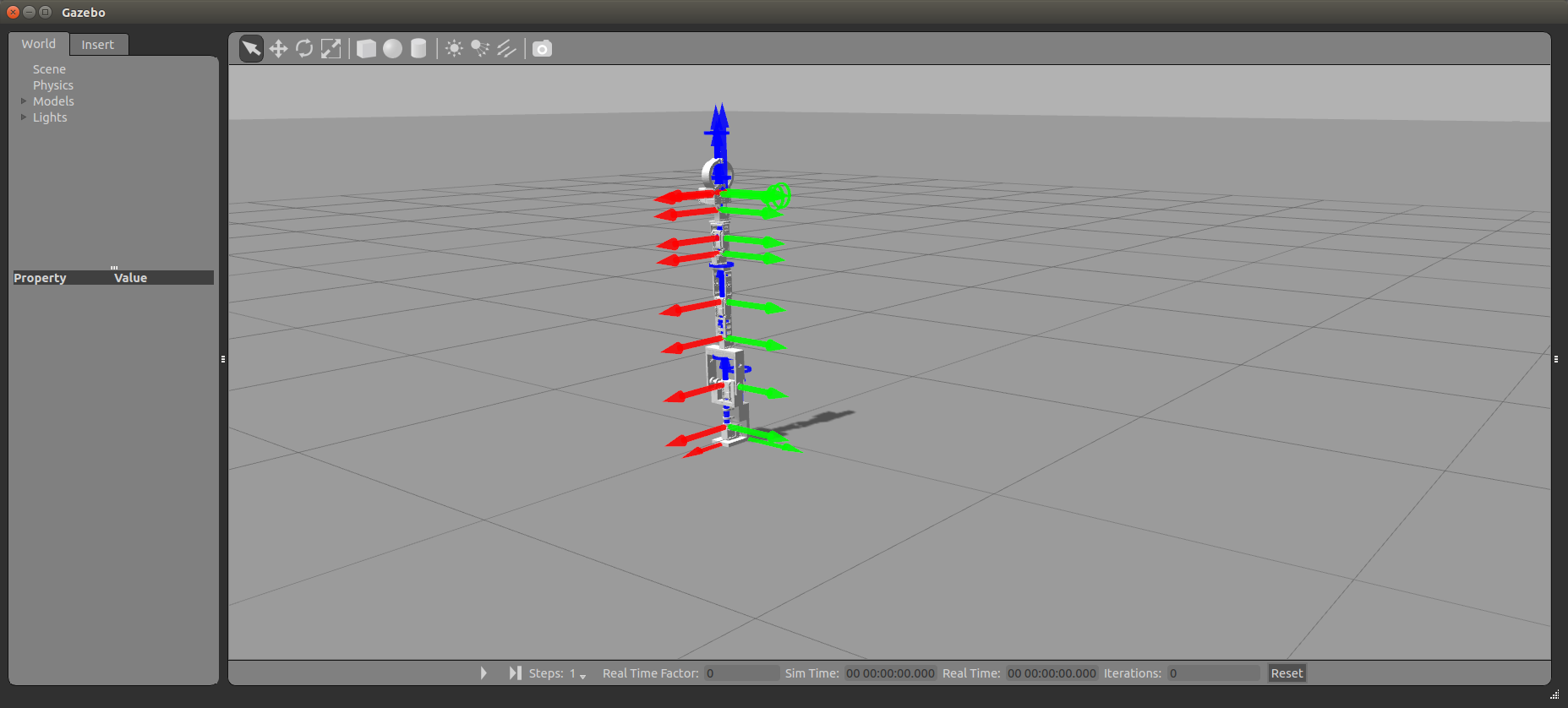
Here is the view that joint in gazebo:
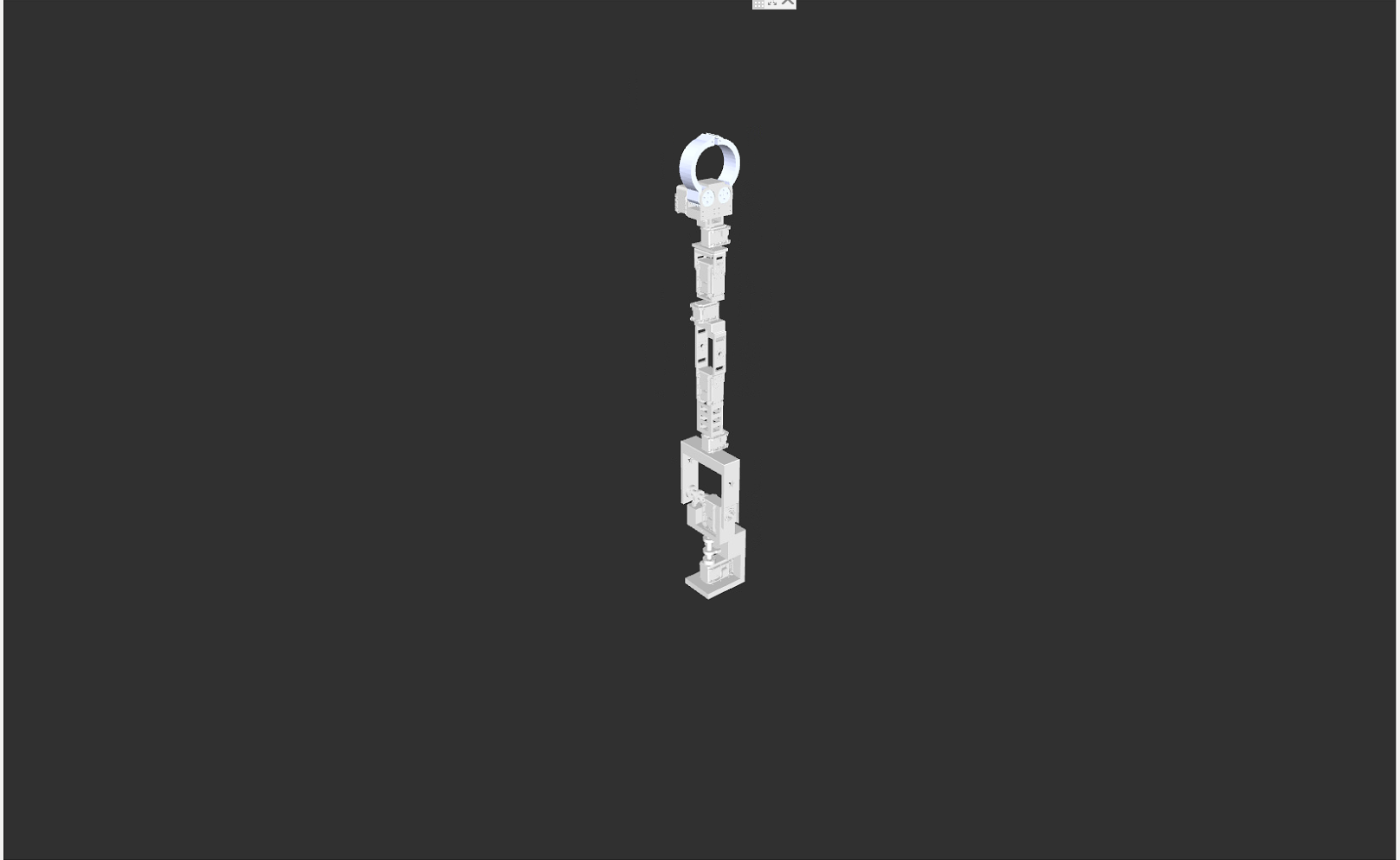
Here is the pic of using simulation pause:
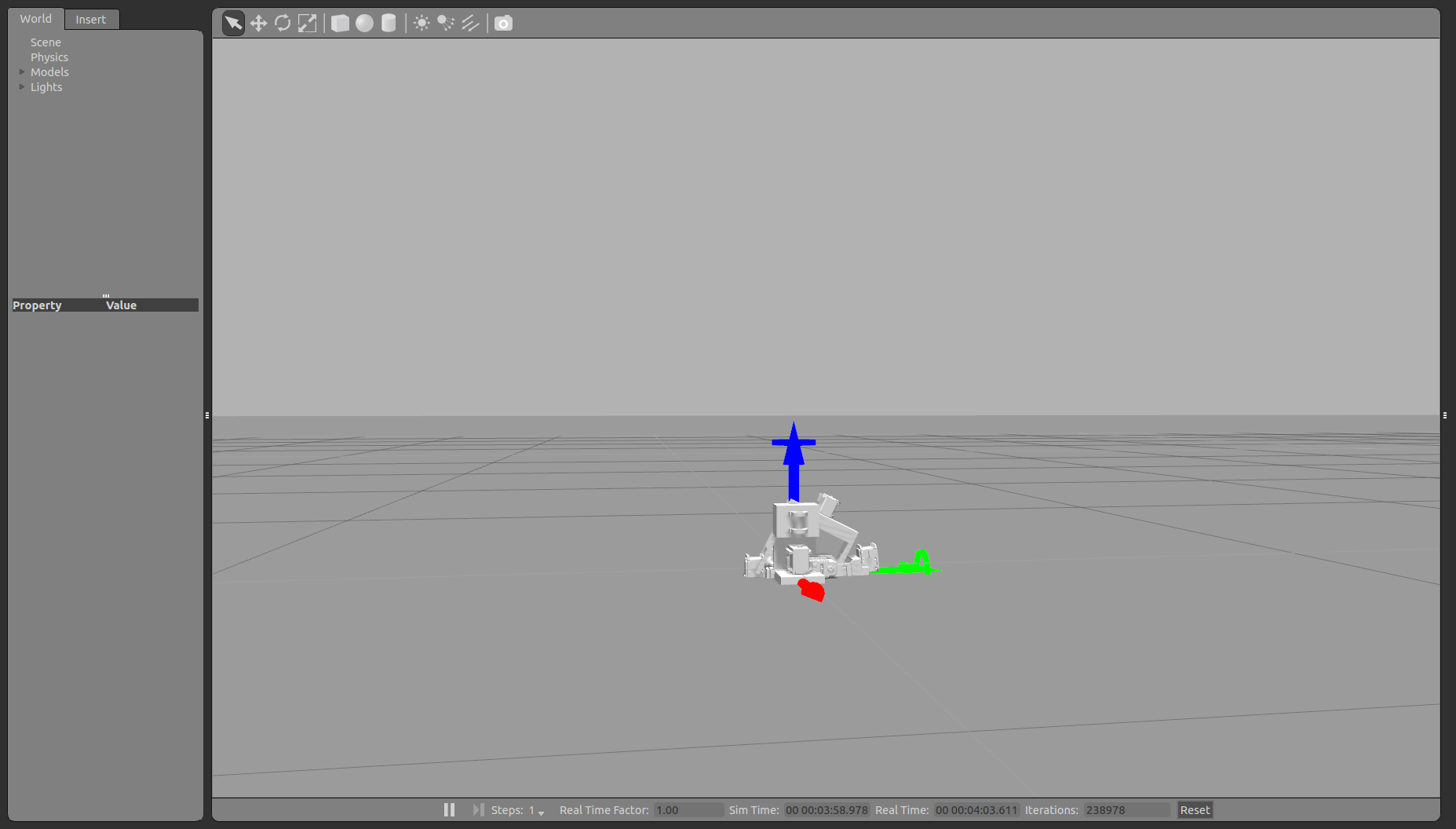
The pic of fixing exploding problem:
Here is the sample of urdf for the robot arm: |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.