
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-10-17 07:54:18 -0500 | received badge | ● Famous Question (source) |
| 2020-04-21 17:16:48 -0500 | received badge | ● Notable Question (source) |
| 2020-04-21 17:16:48 -0500 | received badge | ● Famous Question (source) |
| 2020-04-21 17:16:48 -0500 | received badge | ● Popular Question (source) |
| 2020-03-17 08:34:33 -0500 | received badge | ● Famous Question (source) |
| 2019-09-06 18:29:01 -0500 | received badge | ● Famous Question (source) |
| 2019-09-03 21:05:38 -0500 | received badge | ● Notable Question (source) |
| 2019-08-11 12:43:08 -0500 | received badge | ● Famous Question (source) |
| 2019-07-22 03:35:30 -0500 | received badge | ● Famous Question (source) |
| 2019-07-22 02:11:06 -0500 | received badge | ● Popular Question (source) |
| 2019-05-27 08:40:29 -0500 | received badge | ● Famous Question (source) |
| 2019-04-10 08:48:22 -0500 | received badge | ● Notable Question (source) |
| 2019-03-26 11:31:25 -0500 | commented answer | How to create a costmap layer to avoid downward stairs @Jean_jierrre, have you figured out the solutions? I am having same problem as you for using depth_nav_tools |
| 2019-03-26 11:26:33 -0500 | commented answer | Stairs' detection and avoidance using nav2d @gerson_n were you able to apply it? |
| 2019-03-26 11:23:05 -0500 | edited question | cliff_detector not working cliff_detector not working Hello, I am trying to detect down the stairs as an obstacle. I am using depth_nav_tools for |
| 2019-03-26 11:20:22 -0500 | edited question | cliff_detector not working cliff_detector not working Hello, I am trying to detect downstair as an obstacle. I am using depth_nav_tools for doing |
| 2019-03-26 11:17:54 -0500 | edited answer | cliff_detector not working The issue gets temporarily fixed, just have to open the cliff_detector and depth_pose in the rviz. I am able to connect |
| 2019-03-26 11:16:16 -0500 | answered a question | cliff_detector not working The issue gets fixed, just have to open the cliff_detector and depth_pose in the rviz. |
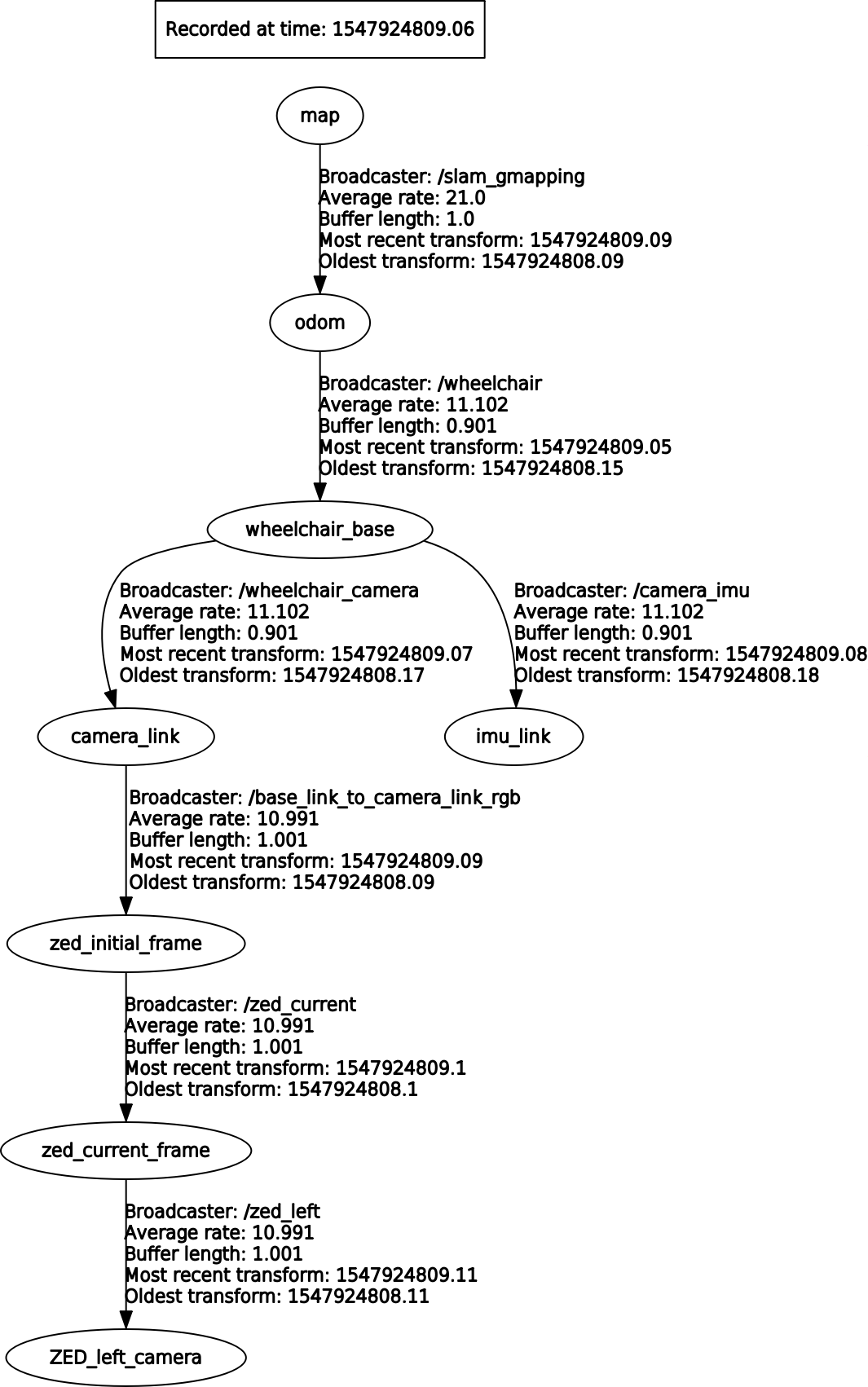
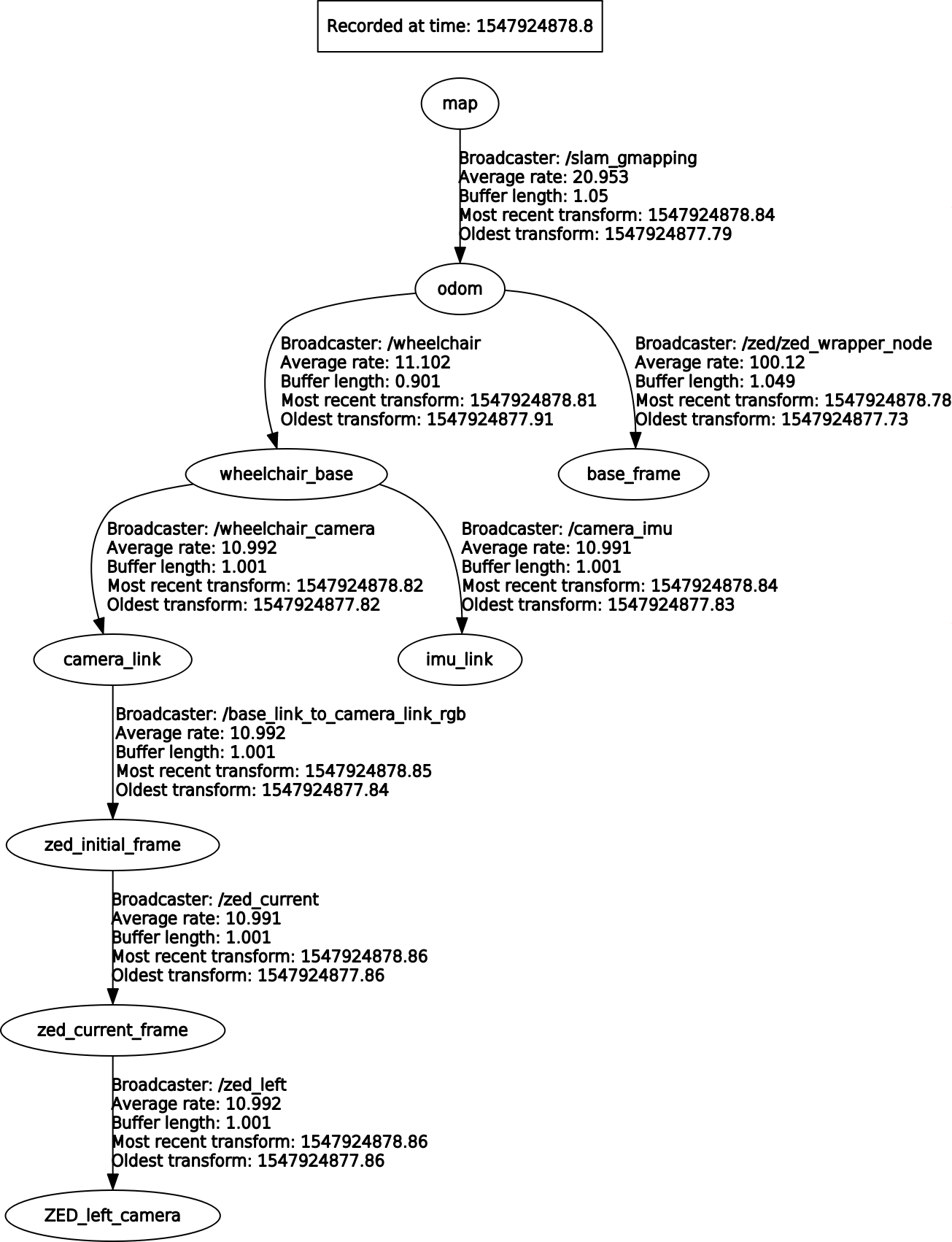
| 2019-03-26 11:13:58 -0500 | marked best answer | SLAM Gmapping map to odom remapping error Hello, I am trying to perform slam_gmapping for my project, and using filtered odometry obtained using ekf. However, the tf_tree shows that map->odom (this is for slam_gmapping), and second side of the tree has map->/odometry/filtered (this is ekf odometry). I am attaching my file which classifies tfs, and the tf diagram I got while running the system. I have remapped odom->/odometry/filtered in the slam_gmapping section of the code, but seems like it is not being activated. Currently, no map is being received. Can anyone tell me how to fix it so I can map the environment using the filtered odometry from ekf for gmapping? This is the tf when the code runs first time: C:\fakepath\tf.png This is the tf I get after waiting few minutes and finding the tf: C:\fakepath\frames.png Code: |
| 2019-03-26 11:12:16 -0500 | received badge | ● Popular Question (source) |
| 2019-03-26 08:07:09 -0500 | marked best answer | scaning error for Laser Scan Matcher Hello, I am using ZED camera and the wheel odometry, fused together with robot_localization. My code uses laser_scan_matcher with gmapping to build the map of the environment. I am using deptimage_to_laserscan to convert 3D point cloud to 2D laser scan. This is my launch file. When I launch it I get error: Any idea how I can fix this? Any suggestions are appreciated. Thanks, Hdbot |
| 2019-03-26 08:07:01 -0500 | received badge | ● Notable Question (source) |
| 2019-03-24 16:29:25 -0500 | edited question | cliff_detector not working cliff_detector not working Hello, I am trying to detect downstair as an obstacle. I am using depth_nav_tools for doing |
| 2019-03-24 16:28:56 -0500 | asked a question | cliff_detector not working cliff_detector not working Hello, I am trying to detect downstair as an obstacle. I am using depth_nav_tools for doing |
| 2019-03-24 16:06:38 -0500 | commented answer | How to create a costmap layer to avoid downward stairs @Jean_jierre, have you figured out the solutions? I am having same problem as you for using depth_nav_tools |
| 2019-03-19 08:56:21 -0500 | commented answer | error installing depth_nav_tools @gvdhoorn, Yes I had tried deleting old build and devel. I got the package installed. It needed #include <tf/transfor |
| 2019-03-19 08:54:50 -0500 | marked best answer | error installing depth_nav_tools Hi All, I am trying to install I am not sure how to fix this, can anyone suggest a way to fix this? Regards, hdbot |
| 2019-03-19 08:54:48 -0500 | commented answer | error installing depth_nav_tools @gvdhoorn, I got the package installed. It needed #include <tf transform_listener.h=""> in the costmap_layer.h fil |
| 2019-03-19 08:37:50 -0500 | commented answer | error installing depth_nav_tools @gvdhoorn I tried this, and it didn't work. Still getting same error when building the package. |
| 2019-03-19 08:37:28 -0500 | commented answer | error installing depth_nav_tools I tried this, and it didn't work. Still getting same error when building the package. |
| 2019-03-19 08:17:10 -0500 | commented answer | scaning error for Laser Scan Matcher this is correct way. If you notice in my original code I had it as base_frame. So the system was confused as to while i |
| 2019-03-19 01:13:43 -0500 | received badge | ● Popular Question (source) |
| 2019-03-18 17:25:42 -0500 | answered a question | scaning error for Laser Scan Matcher I figured out the issues, the base_frame was wrongly written. |
| 2019-03-18 17:24:24 -0500 | asked a question | error installing depth_nav_tools error installing depth_nav_tools Hi All, I am trying to install depth_nav_tools, however, the catkin_make fails with e |
| 2019-03-16 19:48:58 -0500 | asked a question | scaning error for Laser Scan Matcher scaning error for Laser Scan Matcher Hello, I am using ZED camera and the wheel odometry, fused together with robot_loc |
| 2019-03-03 23:46:54 -0500 | received badge | ● Famous Question (source) |
| 2019-02-17 16:58:05 -0500 | edited question | Octomap: No Map Recieved Octomap: No Map Recieved Hello, I tried to follow various solutions and examples to launch my octomap in RVIZ. However, |
| 2019-02-17 16:57:20 -0500 | asked a question | Octomap: No Map Recieved Octomap: No Map Recieved Hello, I tried to follow various solutions and examples to launch my octomap in RVIZ. However, |
| 2019-02-16 19:08:43 -0500 | received badge | ● Famous Question (source) |
| 2019-01-19 13:11:54 -0500 | commented answer | SLAM Gmapping map to odom remapping error I did the modifications, but I am still getting no map received. The tf looks like it flows properly when i run it the f |
| 2019-01-19 13:11:24 -0500 | commented answer | SLAM Gmapping map to odom remapping error I did the modifications, but I am still getting no map received. The tf looks like it flows properly when i run it the f |
| 2019-01-19 13:09:42 -0500 | edited question | SLAM Gmapping map to odom remapping error SLAM Gmapping map to odom remapping error Hello, I am trying to perform slam_gmapping for my project, and using filtere |
| 2019-01-19 13:03:04 -0500 | commented answer | SLAM Gmapping map to odom remapping error I did the modifications, but I am still getting no map received. The tf looks like it flows properly this time, but I am |
| 2019-01-19 11:25:37 -0500 | received badge | ● Notable Question (source) |
| 2019-01-16 10:22:46 -0500 | commented question | SLAM Gmapping map to odom remapping error @kazi ataul goni, you may want to post this question in the forum. This way lot more people will be able to help. |
| 2019-01-16 06:15:16 -0500 | received badge | ● Popular Question (source) |
| 2019-01-15 14:07:55 -0500 | edited question | SLAM Gmapping map to odom remapping error SLAM Gmapping map to odom remapping error Hello, I am trying to perform slam_gmapping for my project, and using filtere |
| 2019-01-15 14:06:50 -0500 | asked a question | SLAM Gmapping map to odom remapping error SLAM Gmapping map to odom remapping error Hello, I am trying to perform slam_gmapping for my project, and using filtere |
| 2018-11-23 00:28:07 -0500 | received badge | ● Notable Question (source) |
| 2018-10-30 01:21:15 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}