The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-07-03 12:28:11 -0500 | received badge | ● Famous Question (source) |
| 2019-12-03 06:24:58 -0500 | received badge | ● Notable Question (source) |
| 2019-05-20 01:45:01 -0500 | marked best answer | YAML DUMP USING C++ How do i dumb my param values into a yaml file using C++? I tried system("rosparam dump example.yaml"); but no luck.. |
| 2019-04-22 22:57:48 -0500 | received badge | ● Notable Question (source) |
| 2019-04-22 22:57:48 -0500 | received badge | ● Famous Question (source) |
| 2019-04-07 22:45:20 -0500 | marked best answer | ROS Kinetic GUI Help Hi everyone, I need help creating a GUI for ROS Kinetic. I tried the ROS - QML - Plugin and no luck. Any guidance , tutorials , or advice on how to go about this will be appreciated. Essentially , I want the GUI to be a node and collect and receive information. Thank you |
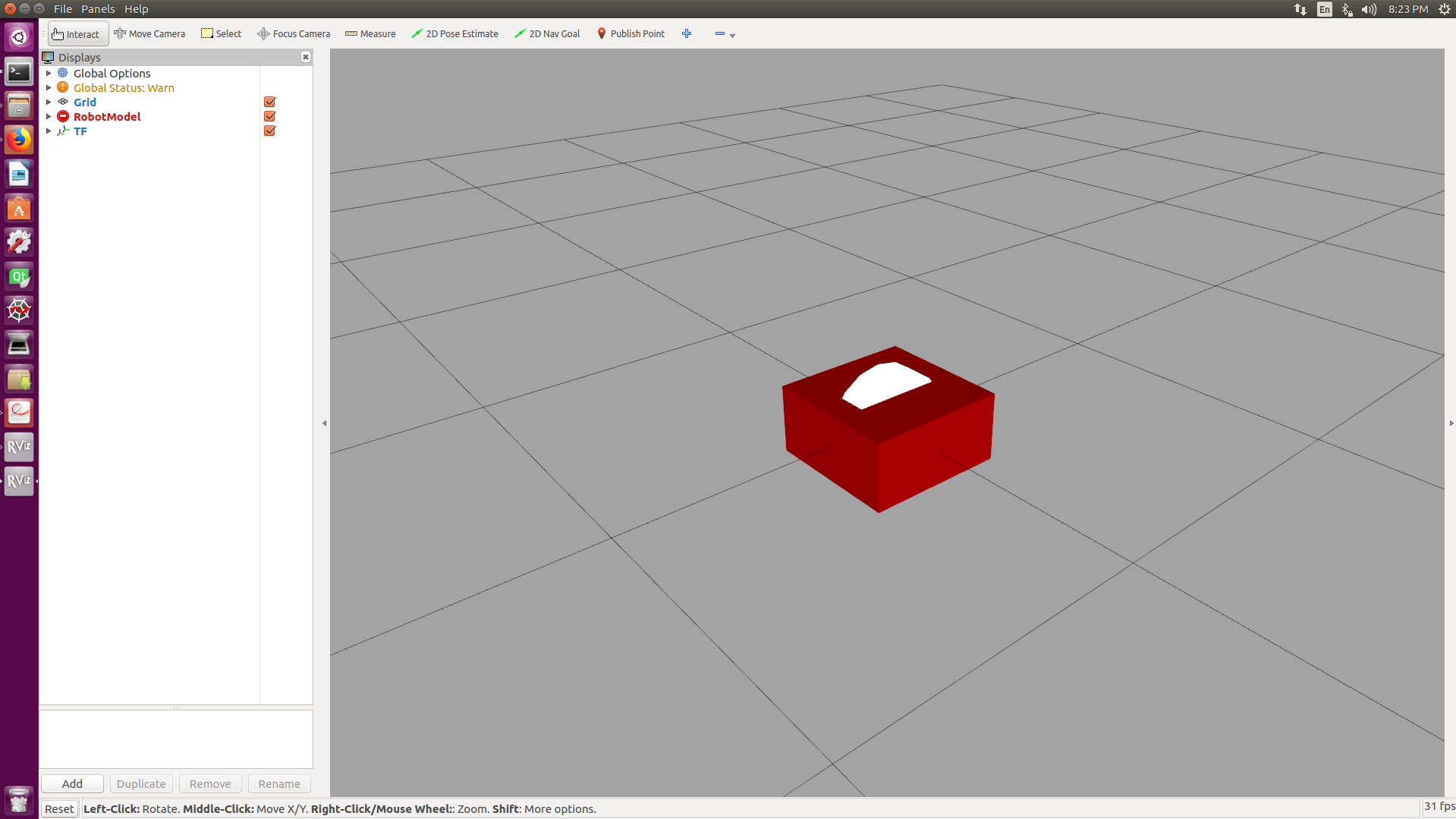
| 2019-03-05 14:49:41 -0500 | marked best answer | dd_robot2.urdf help Hi I am reading "ROS ROBOTICS BY EXAMPLE SECOND EDITION " and I am stuck in chapter 2 , when it introduces the dd_robot2.urdf. What I am getting is the image blow
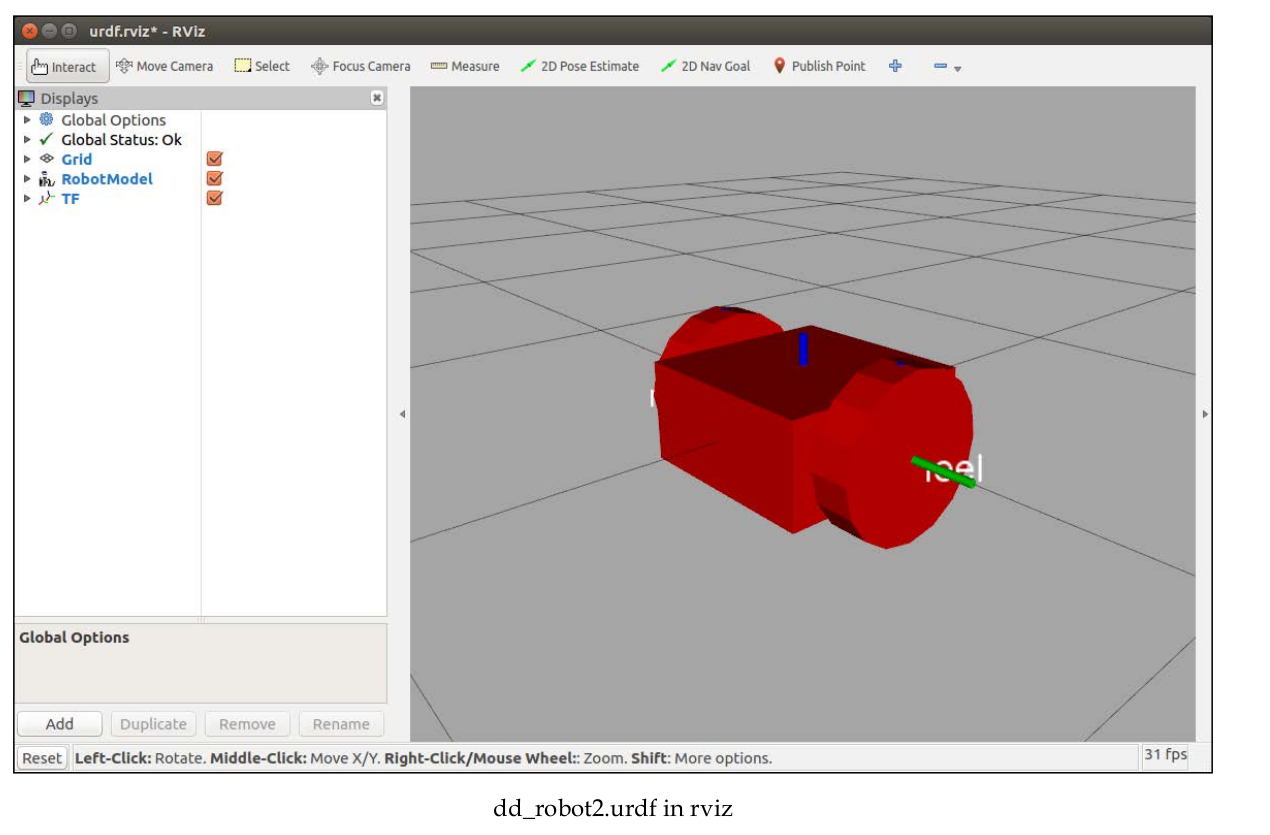
but the book has this instead:
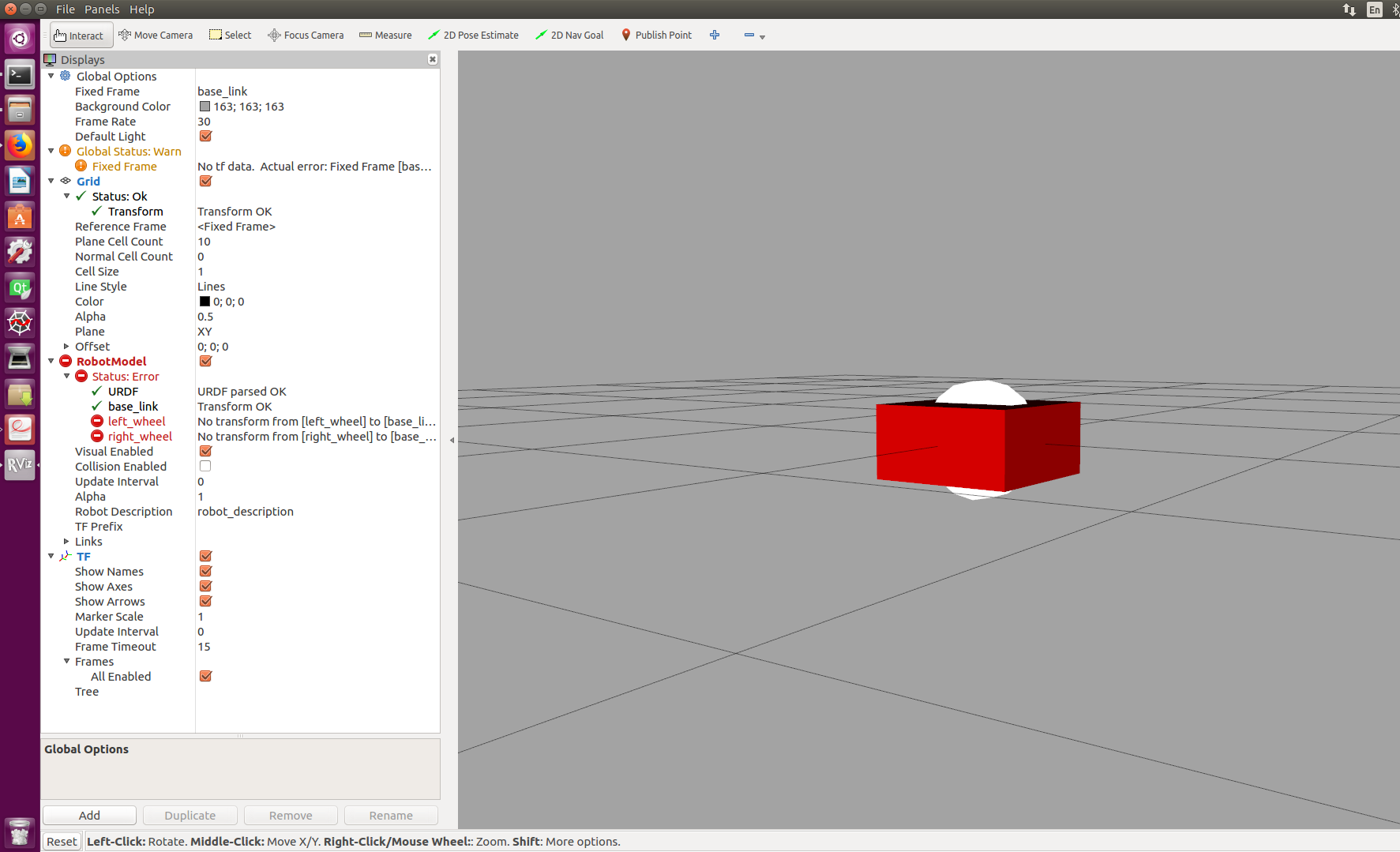
I followed the book step by step and I cant figure out where I went wrong. Any help? Thank you! EDIT1:
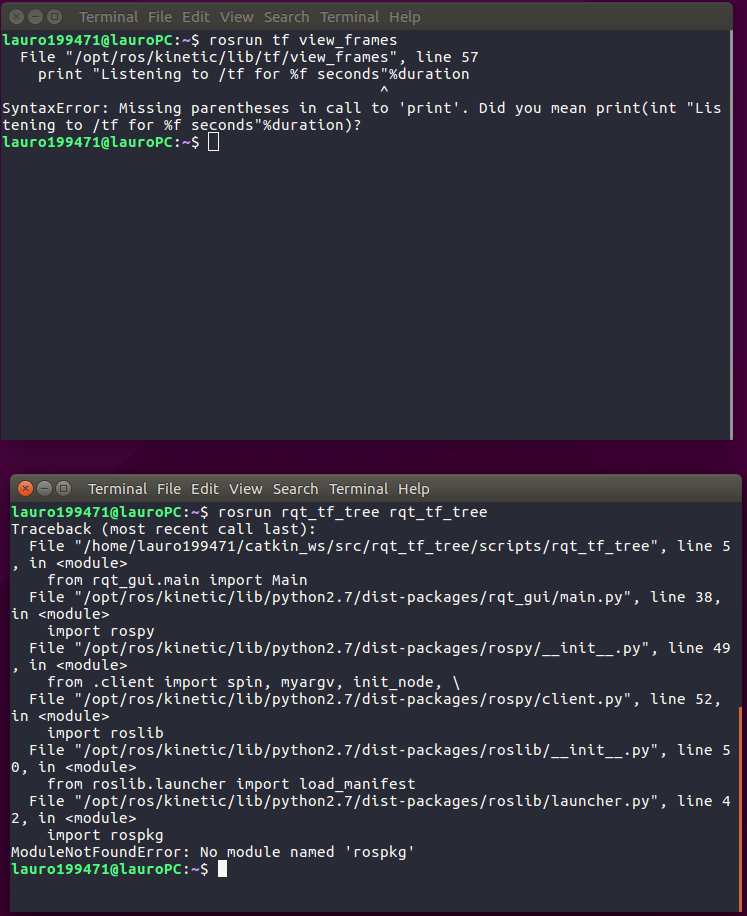
EDIT 2: Launch File: URDF File: Command on terminal: Edit3:
|
| 2018-09-06 03:25:29 -0500 | received badge | ● Famous Question (source) |
| 2018-09-06 03:25:29 -0500 | received badge | ● Notable Question (source) |
| 2018-08-31 00:54:11 -0500 | received badge | ● Popular Question (source) |
| 2018-08-10 07:35:07 -0500 | received badge | ● Famous Question (source) |
| 2018-07-24 11:34:38 -0500 | received badge | ● Famous Question (source) |
| 2018-06-27 10:12:08 -0500 | received badge | ● Famous Question (source) |
| 2018-06-18 03:06:16 -0500 | received badge | ● Notable Question (source) |
| 2018-06-15 11:05:19 -0500 | commented answer | Descartes package in ROS Kinetic Error let me try that |
| 2018-06-15 05:05:59 -0500 | received badge | ● Popular Question (source) |
| 2018-06-14 16:36:33 -0500 | edited question | Descartes package in ROS Kinetic Error Descartes package in ROS Kinetic Errror I am trying to build a workspace with the Descartes package and I keep getting |
| 2018-06-14 16:33:29 -0500 | asked a question | Descartes package in ROS Kinetic Error Descartes package in ROS Kinetic Errror I am trying to build a workspace with the Descartes package and I keep getting |
| 2018-06-05 05:28:47 -0500 | received badge | ● Notable Question (source) |
| 2018-06-01 05:33:06 -0500 | received badge | ● Taxonomist |
| 2018-05-03 11:24:46 -0500 | received badge | ● Notable Question (source) |
| 2018-04-24 06:08:57 -0500 | received badge | ● Popular Question (source) |
| 2018-04-15 00:32:22 -0500 | marked best answer | How to source ROS Kinetic in Ubuntu Core via ssh? Hi everyone, I am having a small issue sourcing ROS kinectic in my Raspberry PI 3(OS: Ubuntu Core). Every time I want to use ROS i have to use the command Thank you |
| 2018-04-15 00:32:17 -0500 | commented answer | How to source ROS Kinetic in Ubuntu Core via ssh? found it thanks! Doing sudo nano /etc/bash.bashrc also sudo because i figured we might be superuser |
| 2018-04-14 21:00:12 -0500 | edited question | How to source ROS Kinetic in Ubuntu Core via ssh? How to sourcing ROS Kinetic in Ubuntu Core via ssh? Hi everyone, I am having a small issue sourcing ROS kinectic in my |
| 2018-04-14 21:00:10 -0500 | edited question | How to source ROS Kinetic in Ubuntu Core via ssh? How to sourcing ROS Kinetic in Ubuntu Core via ssh? Hi everyone, I am having a small issue sourcing ROS kinectic in my |
| 2018-04-14 20:59:48 -0500 | asked a question | How to source ROS Kinetic in Ubuntu Core via ssh? How to sourcing ROS Kinetic in Ubuntu Core via ssh? Hi everyone, I am having a small issue sourcing ROS kinectic in my |
| 2018-04-05 13:29:32 -0500 | marked best answer | Workspace on USB or Package on USB Hello, I am wondering if I can upload my workspace to a USB? I am guessing you cant because of the file structure of ROS but if I can how does one go about that? If I cant , can I move my packages to a USB? |
| 2018-04-04 08:47:25 -0500 | received badge | ● Popular Question (source) |
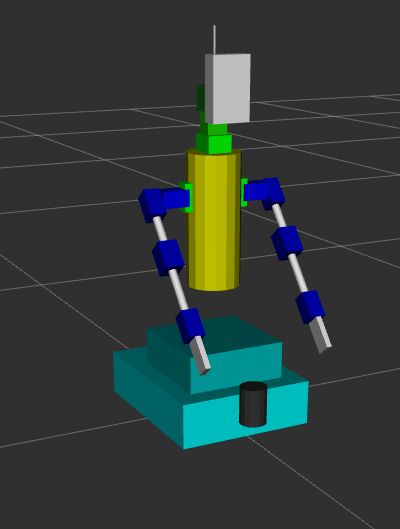
| 2018-04-03 09:22:37 -0500 | marked best answer | PI Robot upper_base_link not showing in Rviz Hello all!
I am having a minor issue in Rviz not displaying a link in Rviz. As you can see in the images the robot seems to be floating but in reality in my URDF files it is connected.
URDF: <robot name="pi_robot"> |
| 2018-04-03 09:22:30 -0500 | commented answer | PI Robot upper_base_link not showing in Rviz How did i not see that lol Thanks to much! |
| 2018-04-02 09:41:43 -0500 | commented question | PI Robot upper_base_link not showing in Rviz Should be upper_base_link |
| 2018-03-29 16:46:25 -0500 | received badge | ● Popular Question (source) |
| 2018-03-29 15:59:37 -0500 | asked a question | PI Robot upper_base_link not showing in Rviz PI Robot upper_base_link not showing in Rviz Hello all! I am having a minor issue in Rviz not displaying a link in Rviz. |
| 2018-03-28 11:17:22 -0500 | marked best answer | Does tf::StampedTransform create a parent and child frame if they both do not exist? Hi everyone! Quick question on tf::StampedTransform. By using that function in C++ does it create parent frame and child frame automatically? EX: In this case does the frame |
| 2018-03-27 15:20:56 -0500 | received badge | ● Popular Question (source) |
| 2018-03-27 15:11:58 -0500 | commented answer | Does tf::StampedTransform create a parent and child frame if they both do not exist? so what is the origin of banana(parent frame)? |
| 2018-03-27 15:11:37 -0500 | commented answer | Does tf::StampedTransform create a parent and child frame if they both do not exist? so what is the origin of banana(parent frame)? is it origin? |
| 2018-03-27 12:12:35 -0500 | commented question | Does tf::StampedTransform create a parent and child frame if they both do not exist? I guess my question is where is a frame defined? Within the broadcasters CPP file or somewhere else? |
| 2018-03-27 12:01:11 -0500 | asked a question | Does tf::StampedTransform create a parent and child frame if they both do not exist? Does tf::StampedTransform create a parent and child frame if they both do not exist? Hi everyone! Quick question on tf:: |
| 2018-03-27 11:39:06 -0500 | marked best answer | Is a Joint in URDF a frame in tf? Hi everyone! I know this might sound silly but I just want to ask simple question to reassure myself. Is a joint in a URDF considered a frame in the TF library? Thanks! |
| 2018-03-27 11:39:06 -0500 | received badge | ● Scholar (source) |
| 2018-03-27 11:37:55 -0500 | commented answer | Is a Joint in URDF a frame in tf? Oh! makes sense! Thank you so much! Edit: rosrun tf view_frames confirms it |
| 2018-03-27 11:37:42 -0500 | commented answer | Is a Joint in URDF a frame in tf? Oh! makes sense! Thank you so much! Edit: rosrun tf view_frames confirms it |
| 2018-03-27 11:37:33 -0500 | commented answer | Is a Joint in URDF a frame in tf? Oh! makes sense! Thank you so much! Edit: rosrun tf view_frames confirms it |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.