
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-05-27 05:50:12 -0500 | received badge | ● Self-Learner (source) |
| 2018-12-10 08:22:25 -0500 | received badge | ● Teacher (source) |
| 2018-12-10 08:22:25 -0500 | received badge | ● Self-Learner (source) |
| 2018-06-15 17:33:52 -0500 | marked best answer | Error Message:lookupTransform base_link to laser timed out. Could not transform laser scan into base_frame. When i run roslaunch hector_slam_launch tutorial.launch and rplidar_ros rplidar.launch , i get an error message lookupTransform base_link to laser timed out. Could not transform laser scan into base_frame. I am able to open up RVIZ, but displays Fixed Frame: No tf data. Actual error: Fixed Frame [map] does not exist. My tf tree says no tf data received. Here is all my rostopic list: /clicked_point /initialpose /map /map_metadata /map_updates /move_base_simple/goal /poseupdate /rosout /rosout_agg /scan /slam_cloud /slam_out_pose /syscommand /tf /tf_static /trajectory Here is my launch file: <launch> <arg name="tf_map_scanmatch_transform_frame_name" default="scanmatcher_frame"/> <arg name="base_frame" default="base_footprint"/> <arg name="odom_frame" default="nav"/> <arg name="pub_map_odom_transform" default="true"/> <arg name="scan_subscriber_queue_size" default="5"/> <arg name="scan_topic" default="scan"/> <arg name="map_size" default="2048"/> <node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
</launch> |
| 2018-04-27 14:14:21 -0500 | marked best answer | How do you know what packages/ nodes to be installed if you download from source This is a general question about what steps to take in order to compile code from source. So I have currently installed hector slam from https://github.com/tu-darmstadt-ros-p... and I am confused on catkin_make process in order to compile the code. There are a lot of make errors that I am encountering, so please provide some direction on how to go about this and the next steps. Thanks You! |
| 2018-04-27 14:09:21 -0500 | marked best answer | ERROR: cannot launch node of type [rplidar_ros/rplidarNode]: can't locate node [rplidarNode] in package [rplidar_ros] I keep on receiving this error every time i execute roslaunch rplidar_ros view_rplidar.launch I have executed source devel/setup.bash as well. In addition, rplidar_ros exists on my rospack list. When i execute, Rviz map/grid shows up, but with no laser scans. please help with this matter. I am not sure what is causing the error. |
| 2018-04-06 11:57:08 -0500 | received badge | ● Famous Question (source) |
| 2018-03-19 13:24:02 -0500 | received badge | ● Famous Question (source) |
| 2017-11-26 13:44:35 -0500 | received badge | ● Popular Question (source) |
| 2017-07-26 03:15:30 -0500 | received badge | ● Famous Question (source) |
| 2017-06-19 16:40:20 -0500 | received badge | ● Famous Question (source) |
| 2017-06-08 03:29:15 -0500 | received badge | ● Notable Question (source) |
| 2017-06-02 09:40:35 -0500 | received badge | ● Notable Question (source) |
| 2017-04-29 11:42:59 -0500 | received badge | ● Famous Question (source) |
| 2017-04-27 07:57:58 -0500 | received badge | ● Popular Question (source) |
| 2017-04-12 02:15:59 -0500 | received badge | ● Notable Question (source) |
| 2017-04-11 12:55:07 -0500 | received badge | ● Associate Editor (source) |
| 2017-04-11 12:49:53 -0500 | received badge | ● Popular Question (source) |
| 2017-03-28 07:29:59 -0500 | received badge | ● Famous Question (source) |
| 2017-03-24 12:49:31 -0500 | received badge | ● Notable Question (source) |
| 2017-03-24 12:13:02 -0500 | answered a question | Error Message:lookupTransform base_link to laser timed out. Could not transform laser scan into base_frame. Issue resolved with tf code messages in hector_slam launch files. |
| 2017-03-24 12:11:53 -0500 | answered a question | ERROR with Map_Server. Not able to open .yaml file. Using prebuilt Map with AMCL launch file- how to execute with RVIZ. rosrun map_server map_server <file_name>.yaml rosrun rviz rviz --> Add Map->topic /map Issue resolved. Added tf code messages in AMCL launch file to configure with my robot. Please see for follow up Q. link text |
| 2017-03-24 12:07:11 -0500 | asked a question | base_footprint not being updated on map I have added a prebuilt map on RVIZ( as .yaml file using Map_Server) and have executed AMCL. I am able to see Pose Array, Map, LaserScan, TF, Pose, odom, and RobotModel on the side menu bar of RVIZ. Problem:base_footprint is not being updated and laser scan is not being matched to the prebuilt map. I am able to find the shortest path (green line) to destination goal, and pose array is being updated as the robot moves to a new random location Any ideas on why this might be happening and how to fix it?? I am trying to accomplish autonomous navigation using a prebuilt map. Thanks! Here is my launch file: <launch> <node name="map_server1" pkg="map_server" type="map_server" args="$(find map_server)/office.yaml"/> <node pkg="tf" type="static_transform_publisher" name="base_link_to_laser" args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /laser 40"/> <node pkg="laser_scan_matcher" type="laser_scan_matcher_node" name="laser_scan_matcher_node" output="screen"> </node> </launch> |
| 2017-03-23 14:12:29 -0500 | answered a question | Beginner here: Need step-by-step help with amcl navigation through a pre-existing .pgm map Download navigation stack from github and run your existing map as .yaml file with map_server. Then, open RVIZ and add map to menu bar with topic /map. Hope this helps! |
| 2017-03-23 09:54:19 -0500 | received badge | ● Organizer (source) |
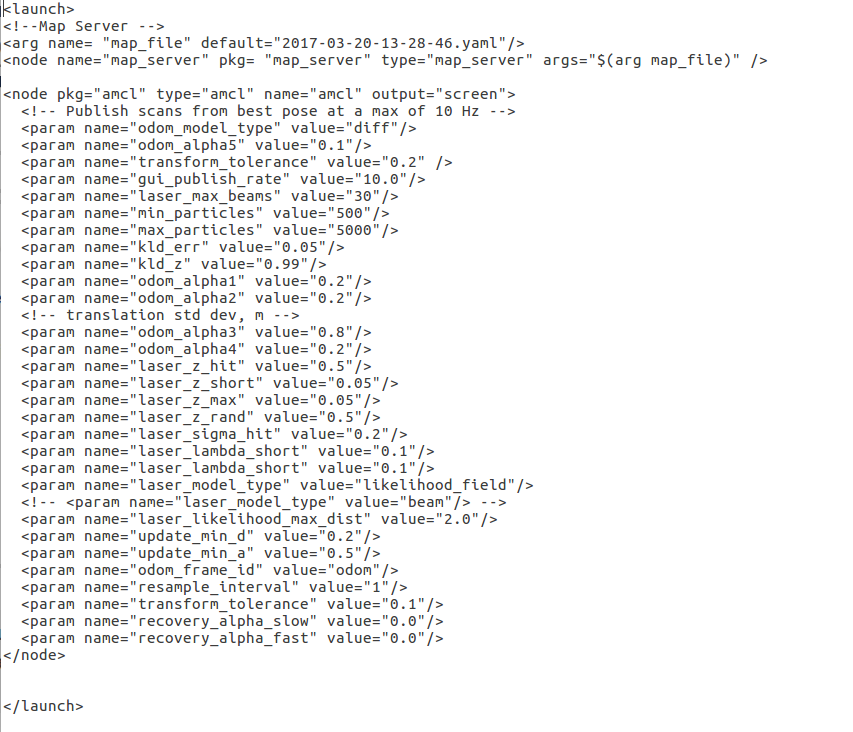
| 2017-03-23 09:47:08 -0500 | answered a question | How to use your custom map for turtlebot navigation in simulation? I am also doing a similar thing with my irobot create 2 robot. Were you able to successfully upload your map onto RVIZ( using a .yaml file) ? I am having a similar problem as well. Please see attached my amcl.launch file for info. See link text for info. Screenshot from 2017-03-23 10-48-08.png |
| 2017-03-22 13:12:52 -0500 | commented question | ERROR with Map_Server. Not able to open .yaml file. Using prebuilt Map with AMCL launch file- how to execute with RVIZ. I ran the following commands simultaneously.. roslaunch hector_slam_launch tutorial.launch rosrun map_server map_server <file>.yaml roslaunch amcl amcl_diff.launch but received message "No laser scan rece |
| 2017-03-22 11:37:07 -0500 | received badge | ● Popular Question (source) |
| 2017-03-22 08:05:57 -0500 | received badge | ● Supporter (source) |
| 2017-03-22 08:01:29 -0500 | received badge | ● Student (source) |
| 2017-03-22 07:55:16 -0500 | edited question | ERROR with Map_Server. Not able to open .yaml file. Using prebuilt Map with AMCL launch file- how to execute with RVIZ. I currently have made my map using Hector Slam and saved the map as .yaml file and .pgm . I have downloaded the Navigation stack as well using git source: https://github.com/ros-planning/navig... . Also ran catkin_make afterwards. Now, I am trying to implement AMCL by placing my robot( irobot create 2) onto the map and do autonomous mapping. I am getting an error when i run am amcl file... which says " MapServer could not open <.yaml> file." Please see attached for my code. Screenshot from 2017-03-23 10-48-08.png Update: I was able to upload map onto RVIZ, and executed amcl with proper tf/ messages. However, when I move the robot towards a location, the PoseArray points do not move. Please recommend a suggestion. Here is the screen pic. Screenshot from 2017-03-23 14-55-11.png |
| 2017-03-22 07:52:26 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}
{kind=link}