| 2021-12-22 13:37:07 -0500 | received badge | ● Necromancer
(source)
|
| 2021-05-28 08:00:01 -0500 | received badge | ● Nice Answer
(source)
|
| 2020-08-16 04:15:40 -0500 | received badge | ● Nice Answer
(source)
|
| 2019-10-02 14:52:59 -0500 | received badge | ● Necromancer
(source)
|
| 2019-09-20 02:41:11 -0500 | marked best answer | Rotate rtabmap's local_costmap? We're using rtabmap and only our local costmap is incorrectly rotated 90 degrees :(. We've tried using TF to rotate a few things with the static_transform_publisher but haven't been successful. Do you have any suggestions? See screenshots: Incorrect: (the local cost map)
 Correct: (the global cost map)
 Thank you! |
| 2019-07-09 12:02:45 -0500 | received badge | ● Self-Learner
(source)
|
| 2019-02-24 07:47:51 -0500 | received badge | ● Enlightened
(source)
|
| 2019-02-24 07:47:51 -0500 | received badge | ● Good Answer
(source)
|
| 2019-01-13 07:40:46 -0500 | marked best answer | How to log float64 on arduino? I'm having trouble logging a float64 value. Here's my arduino code (I'm using rosserial): void jt_callback(const trajectory_msgs::JointTrajectory &msg) {
// http://docs.ros.org/kinetic/api/trajectory_msgs/html/msg/JointTrajectoryPoint.html
trajectory_msgs::JointTrajectoryPoint *points = msg.points; <-- is this correct?
sprintf(log_msg,"points[0].positions[0] = %f",points[0].positions[0]); <-- correct?
nh.loginfo(log_msg);
}
Output: [INFO] [1487350593.639400, 5453.955000]: points[0].positions[0] = ?
The correct value should be 0.1 not ?. Also, when I try %d or %i the output value is -13108. Any help is much appreciated! |
| 2019-01-13 07:40:46 -0500 | received badge | ● Nice Answer
(source)
|
| 2018-12-03 00:09:23 -0500 | received badge | ● Famous Question
(source)
|
| 2018-11-13 07:40:28 -0500 | received badge | ● Student
(source)
|
| 2018-09-12 10:26:29 -0500 | received badge | ● Nice Answer
(source)
|
| 2018-09-12 09:21:48 -0500 | commented answer | mapviz - missing multi-res-image and tile-map plugins What is the error message that you see?
|
| 2018-09-12 09:21:44 -0500 | commented answer | mapviz - missing multi-res-image and tile-map plugins What is the error message that you se?
|
| 2018-07-16 01:32:59 -0500 | received badge | ● Necromancer
(source)
|
| 2017-11-17 12:25:16 -0500 | received badge | ● Famous Question
(source)
|
| 2017-10-02 20:25:59 -0500 | marked best answer | problem with MoveIt + joystick_control.launch I've created a simple arm and I want to control it using a joystick. Here's my launch file: <launch>
<include file="$(find cougarbot)/cougarbot.launch"/>
<include file="$(find cougarbot_moveit_config)/launch/joystick_control.launch"/>
<include file="$(find cougarbot_moveit_config)/launch/move_group.launch"/>
<include file="$(find cougarbot_moveit_config)/launch/moveit_rviz.launch">
<arg name="config" value="True"/>
</include>
</launch>
The error I'm getting is from joystick_control.launch is "[FATAL] Check if you started movegroups. Exiting." Here's the full stack trace: $ roslaunch cougarbot_moveit_config joystick_control.launch
[ INFO] [1486692499.658150322]: Loading robot model 'cougarbot'...
[ INFO] [1486692499.659144317]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ WARN] [1486692499.660517007]: Could not identify parent group for end-effector 'hand'
[ INFO] [1486692500.876474349, 182.851000000]: Loading robot model 'cougarbot'...
[ INFO] [1486692500.877637693, 182.851000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ WARN] [1486692500.878770531, 182.851000000]: Could not identify parent group for end-effector 'hand'
[FATAL] [WallTime: 1486692501.117867] [0.000000] Check if you started movegroups. Exiting.
Traceback (most recent call last):
File "/opt/ros/indigo/lib/moveit_ros_visualization/moveit_joy.py", line 42, in <module>
app = MoveitJoy()
File "/opt/ros/indigo/lib/python2.7/dist-packages/moveit_ros_visualization/moveitjoy_module.py", line 381, in __init__
self.updatePlanningGroup(0)
File "/opt/ros/indigo/lib/python2.7/dist-packages/moveit_ros_visualization/moveitjoy_module.py", line 405, in updatePlanningGroup
raise rospy.ROSInitException(msg)
rospy.exceptions.ROSInitException: Check if you started movegroups. Exiting.
|
| 2017-09-27 12:16:04 -0500 | received badge | ● Famous Question
(source)
|
| 2017-09-04 22:03:23 -0500 | edited answer | How to Detect Subscriber Drops a Message For the subscriber's drop count, you'll have to check within your own subscriber that the header.seq number is always in |
| 2017-09-04 22:02:41 -0500 | edited answer | How to Detect Subscriber Drops a Message You can see the number of dropped messages from the publisher's queue by enabling topic statistics. Read more about it h |
| 2017-09-04 22:02:09 -0500 | edited answer | How to Detect Subscriber Drops a Message You can see the number of dropped messages from the __publisher's__ queue by enabling topic statistics. Read more about |
| 2017-09-04 22:00:39 -0500 | edited answer | How to Detect Subscriber Drops a Message You can see the number of dropped messages by enabling topic statistics. Read more about it here:
http://wiki.ros.org/To |
| 2017-09-04 21:52:22 -0500 | answered a question | How to Detect Subscriber Drops a Message You can see the number of dropped messages by enabling topic statistics. Read more about it here:
http://wiki.ros.org/To |
| 2017-09-04 21:50:10 -0500 | commented answer | How to Detect Subscriber Drops a Message In ROS1 this works. You can even see it yourself on this line of code in rospy's implementation:
if self.last_seq_ + 1 |
| 2017-09-04 21:49:57 -0500 | commented answer | How to Detect Subscriber Drops a Message In ROS1 this works. You can even see it yourself on this line of code in rospy's implementation:
if self.last_seq_ + 1 |
| 2017-08-28 08:03:07 -0500 | received badge | ● Famous Question
(source)
|
| 2017-08-27 02:18:53 -0500 | received badge | ● Necromancer
(source)
|
| 2017-06-26 12:44:42 -0500 | received badge | ● Popular Question
(source)
|
| 2017-06-26 12:44:42 -0500 | received badge | ● Notable Question
(source)
|
| 2017-05-22 18:21:42 -0500 | received badge | ● Famous Question
(source)
|
| 2017-05-22 14:29:00 -0500 | received badge | ● Notable Question
(source)
|
| 2017-05-20 13:24:44 -0500 | received badge | ● Citizen Patrol
(source)
|
| 2017-05-13 11:19:59 -0500 | marked best answer | how do I to make /wgs84 frame available? Bit of background: I want to use point_click_publisher to publish lat/lon coordinates of tile map. Answer: The easiest way would be to type /wgs84 in the Frame dropdown for the point click plugin. That will make the published point have the /wgs84 frame and contain longitude for the x coordinate and latitude for the y coordinate. Source: https://github.com/swri-robotics/mapv... But how do I to make the /wgs84 frame available? I'm following the steps that were given, but still no wgs84 frame... The /wgs84 frame is not a true tf frame (since it can't be defined with a simple translation and rotation), so it won't be available through the standard tf interfaces. For the point_click_publisher you would just type /wgs84 into the frame dropdown box. This will work as long as the /local_xy_origin has been published and the tf frame it is associated with is connected to the frame mapviz is displaying. I see in your launch file that the initialize origin node is set to 'auto' and will only publish the origin once it receives a GPS message. Can you confirm that the /local_xy_origin topic has been populated? If not, you can set it to one of the manually defined origins instead of 'auto'. To use the /wgs84 frame in code as if it were a tf frame you would use swri_transform_util::TransformManager in place of a tf::TransformListener and use swri_transform_util::Transform instead of tf::Transform. The transform manger wraps the standard tf listener and also listens for the local xy orign so it can perform the conversion to and from lat / lon and
frames in the tf tree. Source: https://github.com/swri-robotics/mapv... My roslaunch file mapviz.launch. Launch log output: process[swri_transform-1]: started with pid [125343]
process[mapviz_ubuntu_125328_4724633399611045863-2]: started with pid [125344]
process[initialize_origin-3]: started with pid [125345]
process[rosapi-4]: started with pid [125346]
[139911776519936] [/initialize_origin/initialize_origin:101]: Local XY origin is "auto"
[139911776519936] [/initialize_origin/initialize_origin:104]: Local XY frame ID is "/world"
[139911776519936] [/initialize_origin/initialize_origin:121]: Subscribed to NavSat on /gps/fix
Warning: TF_OLD_DATA ignoring data from the past for frame robot_base at time 1.49455e+09 according to authority unknown_publisher
Possible reasons are listed at http://wiki.ros.org/tf/Errors%20explained
at line 273 in /tmp/binarydeb/ros-kinetic-tf2-0.5.15/src/buffer_core.cpp
[139911042692864] [/initialize_origin/gps_callback:54]: Got NavSat message. Setting origin and unsubscribing from NavSat.
[7ff0bf201880] [/mapviz_ubuntu_125328_4724633399611045863/TileMapPlugin::PrintError:245]: Error: No transform between /wgs84 and map
[7ff0bf201880] [/mapviz_ubuntu_125328_4724633399611045863/PointClickPublisherPlugin::PrintError:169]: Error: Unable to find transform from map to wgs84.
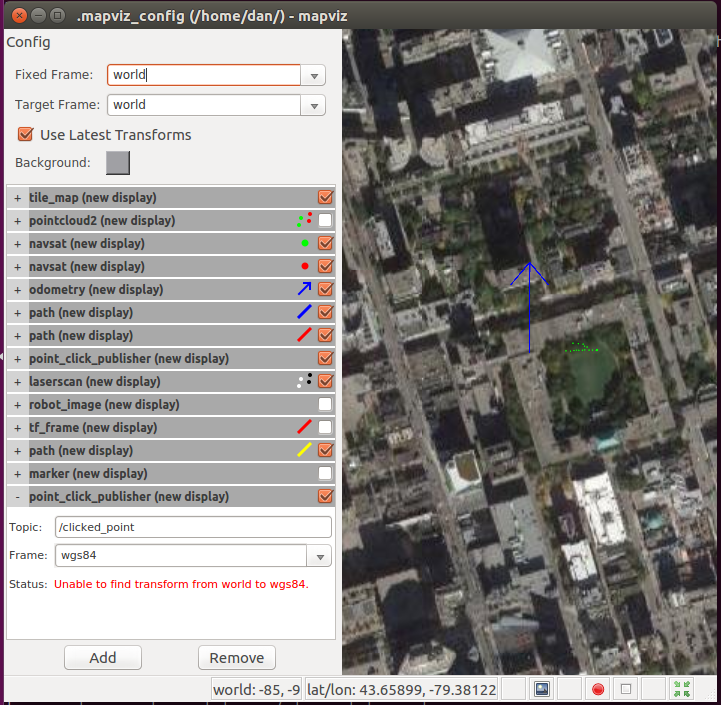
My tf tree: 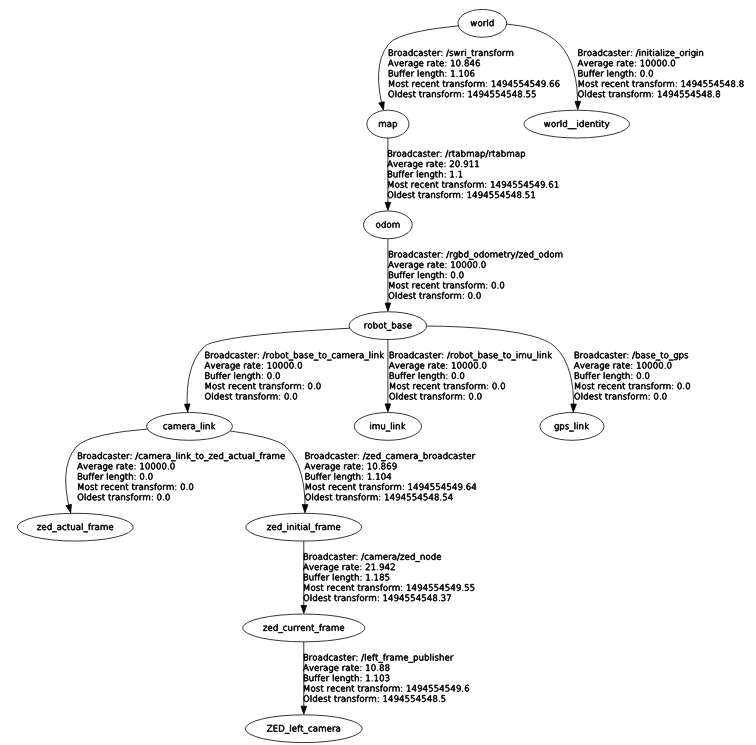
I am using the latest mapviz packages available for ubuntu 16.04. Any thoughts? THANK YOU, this feature would be awesome! |
| 2017-05-13 11:19:57 -0500 | commented answer | how do I to make /wgs84 frame available? Yes! Thank you! Putting a forward slash is important -- so "/wgs84" rather than "wgs84".
We opened an issue for this: h |
| 2017-05-11 22:02:47 -0500 | asked a question | how do I to make /wgs84 frame available? how do I to make /wgs84 frame available?
Bit of background:
I want to use point_click_publisher to publish lat/lon coor |
| 2017-05-10 20:50:00 -0500 | answered a question | Error with RViz I figured out how to fix this problem for me:
Follow install steps for the ros warehouse http://moveit.ros.org/install |
| 2017-05-06 18:12:29 -0500 | commented question | Error with RViz |
| 2017-04-23 07:12:29 -0500 | answered a question | How to configure environment parameter TURTLEBOT_GAZEBO_WORLD_FILE Worked for me in kinetic:
export TURTLEBOT_GAZEBO_WORLD_FILE=/opt/ros/kinetic/share/turtlebot_gazebo/worlds/playground. |
| 2017-04-21 04:45:36 -0500 | received badge | ● Popular Question
(source)
|
| 2017-04-21 04:45:36 -0500 | received badge | ● Notable Question
(source)
|
| 2017-04-20 15:55:09 -0500 | received badge | ● Popular Question
(source)
|
| 2017-04-20 14:48:44 -0500 | marked best answer | robot_localization producing 180° rotation jumps only when static publishing map->odom I have configured world_frame=odom. When I statically publish TF map->odom my output of ekf_localization_node is jumping a lot. I've looked all over for the problem but I am stuck! Here's an 8 second streamable video of the problem seen in rviz:
https://drive.google.com/file/d/0B6qI... When I comment out... <node pkg="tf2_ros" type="static_transform_publisher" name="map_to_odom" args="0 0 0 0 0 0 1 map odom" />
...the problem goes away and I see good, stable, filtered odom. My data bag of the problem https://drive.google.com/file/d/0B6qI... My ekf_localization_node.launch <launch>
<!-- Problem is introduced when this is uncommented
<node pkg="tf2_ros" type="static_transform_publisher" name="map_to_odom" args="0 0 0 0 0 0 1 map odom" />
-->
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization_local" clear_params="true">
<remap from="/odometry/filtered" to="/odometry/filtered_local"/>
<param name="frequency" value="10"/>
<param name="world_frame" value="odom"/>
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/>
<param name="base_link_frame" value="robot_base"/>
<!-- IMU -->
<param name="imu0" value="/imu/data_fixed"/>
<rosparam param="imu0_config">[false, false, false,
true, true, true,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<!-- VISUAL ODOMETRY -->
<param name="odom0" value="/rgbd_odometry/odom"/>
<rosparam param="odom0_config">[true, true, false,
false, false, false,
false, false, false,
false, false, true,
false, false, false]</rosparam>
</node>
</launch>
My rtabmap rgbd_odometry.launch <launch>
<node pkg="tf2_ros" type="static_transform_publisher" name="robot_base_to_camera_link" args="0.7 0 0.6 0 0 0 robot_base camera_link"/>
<node pkg="tf2_ros" type="static_transform_publisher" name="camera_link_to_zed_actual_frame" args="0 0 0 0 0 0 camera_link zed_actual_frame"/>
<!-- RGBD_ODOMETRY -->
<group ns="rgbd_odometry">
<node output="screen" type="rgbd_odometry" name="zed_odom" pkg="rtabmap_ros">
<param name="frame_id" value="robot_base"/>
<param name="publish_tf" value="false"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="depth/image" to="/camera/depth/depth_registered"/>
<param name="Odom/ResetCountdown" value="1"/>
</node>
</group>
</launch>
My roswtf dan@ubuntu:~/URC$ roswtf
Loaded plugin tf.tfwtf
No package or stack in context
================================================================================
Static checks summary:
No errors or warnings
================================================================================
Beginning tests of your ROS graph. These may take awhile...
analyzing graph...
... done analyzing graph
running graph rules...
... done running graph rules
running tf checks, this will take a second...
... tf checks complete
Online checks summary:
Found 2 warning(s).
Warnings are things that may be just fine, but are sometimes at fault
WARNING The following node subscriptions are unconnected:
* /ekf_localization_local:
* /set_pose
* /rqt_gui_py_node_8452:
* /statistics
WARNING The following nodes are unexpectedly connected:
* /rgbd_odometry/zed_odom->/rviz_1492655609198267406 (/tf)
* /rgbd_odometry/zed_odom->/roswtf_9931_1492660614427 (/tf)
* /robot_base_to_camera_link->/rviz_1492655609198267406 (/tf_static)
* /map_to_odom->/rviz_1492655609198267406 (/tf_static)
* /camera_link_to_zed_actual_frame->/rviz_1492655609198267406 (/tf_static)
My bad TF (when publishing static map->odom transform) $ rosrun tf tf_echo robot_base odom
At time 1492662864.848
- Translation: [0.001, -0.017, -0.038]
- Rotation: in Quaternion [0.639, -0.283, -0.638, 0.324]
in RPY (radian) [1.541, 0.684, -1.535]
in RPY (degree) [88.289, 39.178, -87.969]
My good TF (when NOT publishing static map->odom transform) $ rosrun tf tf_echo robot_base odom
At time 1492661532.036 ...
(more) |

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.