
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-09-14 07:34:43 -0500 | received badge | ● Notable Question (source) |
| 2022-09-14 07:34:43 -0500 | received badge | ● Famous Question (source) |
| 2022-06-10 13:56:02 -0500 | received badge | ● Famous Question (source) |
| 2022-05-06 18:39:50 -0500 | received badge | ● Popular Question (source) |
| 2022-02-25 03:56:25 -0500 | marked best answer | return a message type from callback Is there a way to return anything other than void from a callback? since i can change the callback in general is a function. But where can I return the value to? Since the callback is called from the subscribe. |
| 2022-02-06 09:15:42 -0500 | asked a question | nodelet name appended to topic nodelet name appended to topic Hi, I created a nodelet to read a point cloud. It is a small example taken from the node |
| 2022-02-06 09:10:36 -0500 | commented answer | Automatic node shutdown if topic is no longer receiving messages This was sufficient for what I wanted to achieve. Thanks! |
| 2022-02-06 09:10:22 -0500 | marked best answer | Automatic node shutdown if topic is no longer receiving messages Hi, I have a node that receives camera messages. I want the node to shutdown when the rosbag is done playing. I know I can do this with roslaunch. But I wanted to know if I could do this with code. I noticed that my code works for some recordings and fails for others. Is there a way to shutdown the node outside the callback? My subscriber is part of a class and the subscriber is initialized with the constructor. My node is defined as follows |
| 2022-02-06 09:10:00 -0500 | received badge | ● Notable Question (source) |
| 2022-01-04 10:50:30 -0500 | received badge | ● Popular Question (source) |
| 2022-01-03 15:17:45 -0500 | asked a question | Automatic node shutdown if topic is no longer receiving messages Automatic node shutdown if topic is no longer receiving messages Hi, I have a node that receives camera messages. I wa |
| 2021-09-23 07:30:02 -0500 | asked a question | Fusing multiple IMU inputs with ROS Fusing multiple IMU inputs with ROS Hi, I wanted to know if there is a package that already exists that can fuse multi |
| 2020-01-25 05:29:39 -0500 | received badge | ● Famous Question (source) |
| 2019-12-12 02:26:12 -0500 | received badge | ● Famous Question (source) |
| 2019-09-20 02:15:39 -0500 | marked best answer | Multiple publishers and subscribers in a class I am trying to build single c++ file which contains a class that handles both subscribers and publishers. I want to publish multiple instance of a msg (representing different sensors) using the same class. |
| 2018-09-12 02:15:10 -0500 | answered a question | Google Cartographer TF Cartographer uses TF2. The idea is that now the frame name should follow the new naming convention. i.e frame_id = "odo |
| 2018-08-22 03:18:25 -0500 | commented question | How can I extract the coordinates of a point cloud Rviz displays the pointcloud data if you subscribe to the topic and in the correct frame. To extract the coordinates of |
| 2018-08-22 03:11:21 -0500 | received badge | ● Notable Question (source) |
| 2018-08-20 02:31:11 -0500 | commented question | How can I extract the coordinates of a point cloud If you iterate over the pointcloud, you can get all the coordinates. The question needs more clarity. |
| 2018-08-20 02:29:39 -0500 | commented question | roscd can't find packages Have you tried rospack find turtlebot_teleop ? If rospack can't find it, then it must've been deleted if you did a apt-g |
| 2018-08-08 01:26:37 -0500 | marked best answer | create a nodelet launch file I have managed to build a nodelet (tegra_stereo) and it is detected when I run "rospack plugins --attrib=plugin nodelet" I want to run the nodelet. I couldn't find any helpful tutorial to do that. How do I start the nodelet? Or how to call the nodelet on another ros program? Update 2 I could launch the nodelet using the following launch file. This is what I get on rqt_graph
This is on my rostopic list /stereo/cam1/image_rect/compressed/parameter_updates /stereo/cam1/image_rect/compressedDepth /stereo/cam1/image_rect/compressedDepth/parameter_descriptions /stereo/cam1/image_rect/compressedDepth/parameter_updates /stereo/cam1/image_rect/theora /stereo/cam1/image_rect/theora/parameter_descriptions /stereo/cam1/image_rect/theora/parameter_updates /stereo/disparity /stereo/disparity_raw /stereo/disparity_raw/compressed /stereo/disparity_raw/compressed/parameter_descriptions /stereo/disparity_raw/compressed/parameter_updates /stereo/disparity_raw/compressedDepth /stereo/disparity_raw/compressedDepth/parameter_descriptions /stereo/disparity_raw/compressedDepth/parameter_updates /stereo/disparity_raw/theora /stereo/disparity_raw/theora/parameter_descriptions /stereo/disparity_raw/theora/parameter_updates /tf The nodelet subscribes to the following topics but it does not work for me. There are no messages on the /stereo topics. Any insights on doing this? Thanks! |
| 2018-07-11 10:55:23 -0500 | received badge | ● Teacher (source) |
| 2018-07-11 05:28:49 -0500 | commented question | Subscribing to a topic whenever it publishes without affecting the execution of program If the second node doesn't have any data from the first node, what work can it do? In any case, you can place the task |
| 2018-07-11 01:49:50 -0500 | answered a question | Can 3D Lidar localize when placed vertically ? In general, for ICP to work well you will need to have planar regions that can be detected. If you have irregular surfac |
| 2018-07-11 01:36:30 -0500 | answered a question | How can I remove lidar ring? You have to do a ground plane detection. There are several approaches using PCL like planar segmentation. Just filteri |
| 2018-07-09 09:15:45 -0500 | answered a question | The axis of VLP 16 PUCK changes each time. Have you tried the velodyne driver? It works perfectly with the VLP 16 series. A screenshot of the problem can be more |
| 2018-07-09 09:08:23 -0500 | answered a question | Learn ros doing exercices The tutorials on the ROS website are a great way to start. Once you complete that, you can do the husky demo as suggeste |
| 2018-07-09 08:24:15 -0500 | answered a question | what is the differences between ego-motion and odometry Both words can be used interchangeably in general. Ego-motion is defined as the 3D motion of a system (ex camera) with |
| 2018-07-09 08:17:43 -0500 | answered a question | Is it more "rossy" to publish to one topic and later distinguish msgs? ROS logging uses approach 1. All log messages are passed to /rosout. The first approach is simple to implement as well |
| 2018-06-26 03:35:18 -0500 | received badge | ● Student (source) |
| 2018-05-31 01:27:46 -0500 | received badge | ● Notable Question (source) |
| 2018-05-28 07:58:47 -0500 | received badge | ● Popular Question (source) |
| 2018-05-28 06:57:16 -0500 | commented answer | shutdown alll nodes Thanks a lot! I didn't know of this parameter. |
| 2018-05-28 06:56:48 -0500 | marked best answer | shutdown alll nodes Hi, I want to shutdown all nodes from within a ros node. ros::shutdown() kills the current node but does not kill the other nodes. I know that all nodes can be killed using the terminal and through the launch file. But I test if a certain condition is met and only in such a circumstance I want all the nodes to shutdown. Thanks! |
| 2018-05-28 06:32:07 -0500 | commented answer | shutdown alll nodes Hi, the rosnode.kill_nodes and the API is for the python variant. I am not able to find the C++ equivalent. |
| 2018-05-28 06:21:00 -0500 | asked a question | shutdown alll nodes shutdown alll nodes Hi, I want to shutdown all nodes from within a ros node. ros::shutdown() kills the current node but |
| 2018-01-14 20:29:35 -0500 | marked best answer | Start a nodelet roscpp (Tegra SGM nodelet) I have a ros package which builds a image_proc like node for cuda SGM. The nodelet is exported as follows After this, how do call this nodelet? Since I do not have a cpp file like the image_proc or stereo_image_proc to directly call the method. Is there a way to launch the nodelet or how do I launch it? Thanks! |
| 2018-01-14 20:28:45 -0500 | received badge | ● Notable Question (source) |
| 2018-01-14 20:28:45 -0500 | received badge | ● Famous Question (source) |
| 2018-01-04 04:14:10 -0500 | received badge | ● Famous Question (source) |
| 2018-01-04 04:14:10 -0500 | received badge | ● Notable Question (source) |
| 2017-12-08 05:07:12 -0500 | commented answer | Using CallbackQueue Where do I call the callAvailable() if I have the nodehandle in a class? |
| 2017-11-08 07:57:24 -0500 | received badge | ● Famous Question (source) |
| 2017-10-23 23:53:53 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
 I have a separate callback for each of those topics, even though they carry the same message (left side carries one type and right the other). Is there a way to use a single callback function to handle both types of messages and handle all the requests at the same time?
I have a separate callback for each of those topics, even though they carry the same message (left side carries one type and right the other). Is there a way to use a single callback function to handle both types of messages and handle all the requests at the same time?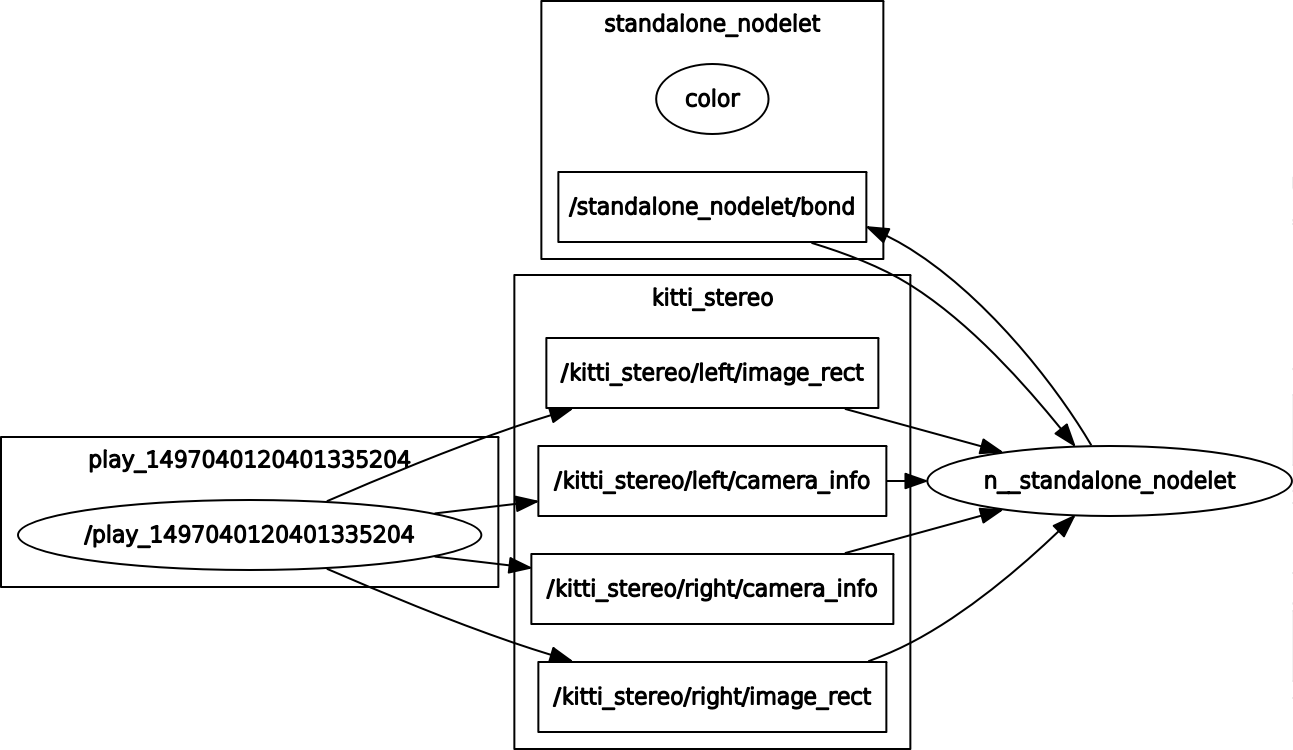 standalone_nodelet doesn't connect to tegra_stereo
standalone_nodelet doesn't connect to tegra_stereo