The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-08-10 16:51:15 -0500 | received badge | ● Famous Question (source) |
| 2022-08-10 16:51:15 -0500 | received badge | ● Notable Question (source) |
| 2020-01-14 13:41:31 -0500 | received badge | ● Famous Question (source) |
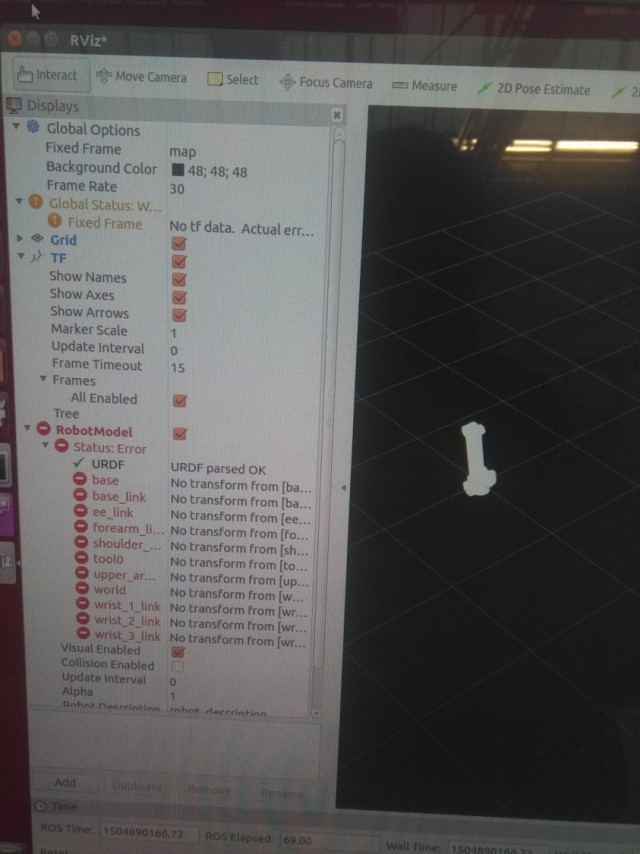
| 2019-05-20 02:13:25 -0500 | marked best answer | Second Rviz instance doesn't show robot model from ROS master Dear all, I am running a ROS master on a first PC with a Universal Robot in it. In a second PC I'd just like to see the visualization with Rviz. After exporting the IP address of the master using The second PC connects to the first one, but I am having trouble to see the robot in the second PC. After adding the robot model in second PC I just get errors in the robot model. It is just shown in a weird position and is coloured white.
Link to screenshot Sorry for the screenshot picture with my phone, but the PC is right now not connected to the internet anymore, so I couldn't post from there. Image upload native here in ROS answers is not yet available for me. Sorry again. Did I forget an important step before connectiong or what went wrong here? Edit/Update: |
| 2019-03-12 19:26:11 -0500 | received badge | ● Famous Question (source) |
| 2018-08-20 09:59:29 -0500 | received badge | ● Famous Question (source) |
| 2018-08-20 09:59:29 -0500 | received badge | ● Notable Question (source) |
| 2018-08-20 09:59:29 -0500 | received badge | ● Popular Question (source) |
| 2018-04-16 07:29:33 -0500 | received badge | ● Notable Question (source) |
| 2017-10-14 08:03:01 -0500 | commented answer | Second Rviz instance doesn't show robot model from ROS master Do you have any ideas, what else I could try or what I have to change? |
| 2017-10-04 03:15:26 -0500 | received badge | ● Popular Question (source) |
| 2017-09-14 11:07:31 -0500 | commented answer | Second Rviz instance doesn't show robot model from ROS master declare -x ROS_MASTER_URI="http://160.69.69.100:11311" declare -x ROS_PACKAGE_PATH="/opt/ros/indigo/share:/opt/ros |
| 2017-09-14 11:07:14 -0500 | commented answer | Second Rviz instance doesn't show robot model from ROS master Hey, I tried it again, but anyways I get the same error: declare -x ROSLISP_PACKAGE_DIRECTORIES="" declare -x ROS |
| 2017-09-14 11:06:54 -0500 | commented answer | Second Rviz instance doesn't show robot model from ROS master Hey, I tried it again, but anyways I get the same error: declare -x ROSLISP_PACKAGE_DIRECTORIES="" declare -x ROS_ |
| 2017-09-14 10:34:41 -0500 | received badge | ● Famous Question (source) |
| 2017-09-14 05:40:07 -0500 | commented question | Second Rviz instance doesn't show robot model from ROS master I updated the values above |
| 2017-09-14 05:38:43 -0500 | edited question | Second Rviz instance doesn't show robot model from ROS master Second Rviz instance doesn't show robot model from ROS master Dear all, I am running a ROS master on a first PC with a |
| 2017-09-14 05:38:27 -0500 | edited question | Second Rviz instance doesn't show robot model from ROS master Second Rviz instance doesn't show robot model from ROS master Dear all, I am running a ROS master on a first PC with a |
| 2017-09-14 05:37:48 -0500 | edited question | Second Rviz instance doesn't show robot model from ROS master Second Rviz instance doesn't show robot model from ROS master Dear all, I am running a ROS master on a first PC with a |
| 2017-09-14 05:37:21 -0500 | edited question | Second Rviz instance doesn't show robot model from ROS master Second Rviz instance doesn't show robot model from ROS master Dear all, I am running a ROS master on a first PC with a |
| 2017-09-09 09:12:08 -0500 | received badge | ● Notable Question (source) |
| 2017-09-09 07:48:16 -0500 | edited question | Second Rviz instance doesn't show robot model from ROS master Second Rviz instance doesn't show robot model from ROS master Dear all, I am running a ROS master on a first PC with a |
| 2017-09-09 07:46:28 -0500 | received badge | ● Popular Question (source) |
| 2017-09-08 17:05:54 -0500 | commented question | Start second Rviz instance sorry, the PC is right now not connected to the internet so it was the only chance to get some kind of screenshot |
| 2017-09-08 17:05:28 -0500 | marked best answer | Start second Rviz instance Dear all, can I start somehow two different Rviz instances which run on two different PC but connect to the same ROS master? I have one ROS master running ROS Indigo. There I am running different tools to control a robot. Now I would like to connect with a second Linux PC to the first ROS master and start another Rviz instance to see the current state of the robot. Is this possible and if yes, how do I have to specify the command on the second PC? Best matl |
| 2017-09-08 17:05:28 -0500 | received badge | ● Scholar (source) |
| 2017-09-08 17:04:37 -0500 | edited question | Second Rviz instance doesn't show robot model from ROS master Second Rviz instance doesn't show robot model from ROS master Dear all, I am running a ROS master on a first PC with a |
| 2017-09-08 17:03:54 -0500 | edited question | Second Rviz instance doesn't show robot model from ROS master Second Rviz instance doesn't show robot model from ROS master Dear all, I am running a ROS master on a first PC with a |
| 2017-09-08 17:02:28 -0500 | received badge | ● Editor (source) |
| 2017-09-08 17:02:28 -0500 | edited question | Second Rviz instance doesn't show robot model from ROS master Second Rviz instance doesn't show robot model from master Dear all, I am running a ROS master on a first PC with a Univ |
| 2017-09-08 17:01:17 -0500 | asked a question | Second Rviz instance doesn't show robot model from ROS master Second Rviz instance doesn't show robot model from master Dear all, I am running a ROS master on a first PC with a Univ |
| 2017-09-08 16:52:02 -0500 | commented question | Start second Rviz instance sorry, the PC is right now not connected to the internet so it was the only chance to get some kinde of screenshot |
| 2017-09-08 12:13:19 -0500 | received badge | ● Supporter (source) |
| 2017-09-08 12:13:18 -0500 | commented answer | Start second Rviz instance Like mentioned above, I found one small operator misstake ;-) but I still do not see the whole robot: https://ibb.co/fD1 |
| 2017-09-08 12:12:39 -0500 | commented question | Start second Rviz instance Thanks for the hint, I also had to do the export ROS_MASTER_URI=myipadress to conenct it to the master. But anyway I hav |
| 2017-09-06 07:43:58 -0500 | received badge | ● Notable Question (source) |
| 2017-09-05 19:22:49 -0500 | received badge | ● Popular Question (source) |
| 2017-09-05 12:48:49 -0500 | asked a question | Start second Rviz instance Start second Rviz instance Dear all, can I start somehow two different Rviz instances which run on two different PC but |
| 2017-09-05 12:43:31 -0500 | commented question | Set TCP speed Thanks for the information. Is it in general planned, that I can easily set an TPC speed of my robot in ROS. |
| 2017-09-05 12:42:14 -0500 | received badge | ● Popular Question (source) |
| 2017-08-24 03:13:13 -0500 | edited question | Set TCP speed Set TCP speed Dear all, we are working with ROS indigo right now using a Universal Robot UR10. I am wondering if there |
| 2017-08-24 03:12:10 -0500 | asked a question | Set TCP speed Set TCP speed Dear all, we are working with ROS indigo right now using a Universal Robot UR10. I am wondering if there |
| 2017-03-07 08:15:59 -0500 | received badge | ● Enthusiast |
| 2017-03-06 13:25:53 -0500 | asked a question | Listener integration in GUI Dear all, I'd like to integrate some kind of listener into the GUI of fermi/cartesian path planner to push the "Execute Cartesian Path" trough an external event. ( https://github.com/ros-industrial-con... ) Therefore I created a function which is called "chatterCallback". This function executes the same functions like pushing the button:
Before that I inserted the code for listening to an topic. Manually checking the terminal I can read the data of "rostopic echo /mytopic". This, I'd like to read out: ``` int argc; char** argv; ros::init(argc, argv, "listener"); ros::NodeHandle n; ros::Subscriber sub = n.subscribe("mytopic", 1000, chatterCallback()); ros::spin(); ``` I got most of the information from here: http://wiki.ros.org/ROS/Tutorials/Wri... but anyways, it is not working. Can you help me to solve this issue? Best regards |
| 2017-01-17 04:35:47 -0500 | answered a question | How do I set the start position for the group.asyncMove() command? I could really use a idea or hint on where the problem might be. If the question is to vague i can gladly try to explain myself in more detail. Any suggestion will do. Thank you! |
| 2017-01-11 14:30:06 -0500 | asked a question | How do I set the start position for the group.asyncMove() command? Hello all, I am writing a script in C++ to move a universal robot with linear or ptp movements depending on paramters set in a configuration file. For example I want to move between Points 1,2,3 linear and then switch to ptp for points 4,5,6 and then switch back to lin again for 7,8,9. The basic script is working but there is one big problem I could not solve yet. In order to move from 3 to 4 and 6 to 7 I have to tell the planner that the start state of the robot has been changed. That works for "group.computeCartesianPath" with "group.setStartStateToCurrentState();" but the same command does not work with "group.asyncMove()". Also group.setStartState(*group.getCurrentState()) as well as another command I found in a example script (but I can not remember it) don't work. I did not even receive a error message like "Motion Planning should always start at the current position of the robot. Ignoring new start State and planning from current state". My next try was to create a plan and use group.execute() after setting the new start state with something like plan.start_state_=group.getCurrentState() but I got some new error messages and before I spend some hours on solving these I wanted to know beforehand if the "plan" approach is going to work eventually and if there is a simpler solution. So my question: How do I set the start position for the group.asyncMove() command? Thank you. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.