| 2020-09-08 14:22:06 -0500 | received badge | ● Nice Question
(source)
|
| 2019-09-20 02:15:24 -0500 | marked best answer | Removing MEGA 2560 and going straight from pc to stm robot. My school made a custom stm board and they gave me the codes for the stm imported it. But now, they also gave me the node file for ROS, how do I "install" the node? I'm very new at this any advice would help. thanks |
| 2019-09-20 02:13:31 -0500 | received badge | ● Famous Question
(source)
|
| 2018-01-10 13:04:38 -0500 | received badge | ● Famous Question
(source)
|
| 2017-07-13 14:41:30 -0500 | received badge | ● Famous Question
(source)
|
| 2017-03-24 02:53:47 -0500 | received badge | ● Famous Question
(source)
|
| 2017-03-22 23:45:11 -0500 | received badge | ● Famous Question
(source)
|
| 2017-02-26 02:36:04 -0500 | received badge | ● Famous Question
(source)
|
| 2017-02-23 02:37:44 -0500 | received badge | ● Notable Question
(source)
|
| 2017-02-23 02:37:25 -0500 | received badge | ● Notable Question
(source)
|
| 2017-02-12 22:59:45 -0500 | received badge | ● Famous Question
(source)
|
| 2017-02-10 10:04:35 -0500 | received badge | ● Popular Question
(source)
|
| 2017-02-10 00:43:47 -0500 | commented question | 2D nav goal doesn't work |
| 2017-02-09 23:42:24 -0500 | asked a question | 2D nav goal doesn't work I have been given the task to fix this custom robot to have the ability to use the 2D nav goal this has been a project handed down student to student There is an existing roslaunch that activates all the nodes however 2D nav goal does not work Here is the roslaunch code and keyboard teleop as well I was told that I need to launch both to achieve 2D nav goal yinht@yinht-desktop:~$ roslaunch hostbot hostbot.launch
... logging to /home/yinht/.ros/log/475151fc-ef50-11e6-a633-00215cbf656c/roslaunch-yinht-desktop-12680.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://yinht-desktop:42810/
SUMMARY
========
PARAMETERS
* /amcl/gui_publish_rate: 10.0
* /amcl/kld_err: 0.05
* /amcl/kld_z: 0.99
* /amcl/laser_lambda_short: 0.1
* /amcl/laser_likelihood_max_dist: 2.0
* /amcl/laser_max_beams: 30
* /amcl/laser_model_type: likelihood_field
* /amcl/laser_sigma_hit: 0.2
* /amcl/laser_z_hit: 0.5
* /amcl/laser_z_max: 0.05
* /amcl/laser_z_rand: 0.5
* /amcl/laser_z_short: 0.05
* /amcl/max_particles: 5000
* /amcl/min_particles: 500
* /amcl/odom_alpha1: 0.2
* /amcl/odom_alpha2: 0.2
* /amcl/odom_alpha3: 0.8
* /amcl/odom_alpha4: 0.2
* /amcl/odom_alpha5: 0.1
* /amcl/odom_frame_id: odom
* /amcl/odom_model_type: omni
* /amcl/recovery_alpha_fast: 0.0
* /amcl/recovery_alpha_slow: 0.0
* /amcl/resample_interval: 1
* /amcl/transform_tolerance: 0.1
* /amcl/update_min_a: 0.5
* /amcl/update_min_d: 0.2
* /arduino/baud: 115200
* /arduino/port: /dev/ttyUSB0
* /camera/camera_nodelet_manager/num_worker_threads: 4
* /camera/depth_rectify_depth/interpolation: 0
* /camera/driver/auto_exposure: True
* /camera/driver/auto_white_balance: True
* /camera/driver/color_depth_synchronization: False
* /camera/driver/depth_camera_info_url:
* /camera/driver/depth_frame_id: camera_depth_opti...
* /camera/driver/depth_registration: False
* /camera/driver/device_id: #1
* /camera/driver/rgb_camera_info_url:
* /camera/driver/rgb_frame_id: camera_rgb_optica...
* /diffusion_tf/angle_std_mean_deviation_deg: 10
* /diffusion_tf/angular_scale: 1.0
* /diffusion_tf/base_frame_id: base_link
* /diffusion_tf/base_width: 0.34
* /diffusion_tf/linear_scale: 1.0
* /diffusion_tf/odom_frame_id: odom
* /diffusion_tf/pos_std_mean_deviation: 0.1
* /diffusion_tf/publish_tf: True
* /diffusion_tf/rate: 40
* /diffusion_tf/vit_ang_std_mean_deviation_deg: 3
* /diffusion_tf/vit_std_mean_deviation_deg: 1
* /hokuyo_laser/calibrate_time: False
* /hokuyo_laser/frame_id: base_laser_link
* /hokuyo_laser/intensity: False
* /hokuyo_laser/max_ang: 1.4
* /hokuyo_laser/min_ang: -1.4
* /hokuyo_laser/port: /dev/ttyACM0
* /move_base/TrajectoryPlannerROS/acc_lim_theta: 3.0
* /move_base/TrajectoryPlannerROS/acc_lim_x: 2.0
* /move_base/TrajectoryPlannerROS/acc_lim_y: 0.0
* /move_base/TrajectoryPlannerROS/angular_sim_granularity: 0.025
* /move_base/TrajectoryPlannerROS/dwa: True
* /move_base/TrajectoryPlannerROS/escape_vel: -0.05
* /move_base/TrajectoryPlannerROS/gdist_scale: 0.6
* /move_base/TrajectoryPlannerROS/heading_lookahead: 0.325
* /move_base/TrajectoryPlannerROS/heading_scoring: False
* /move_base/TrajectoryPlannerROS/heading_scoring_timestep: 0.8
* /move_base/TrajectoryPlannerROS/holonomic_robot: False
* /move_base/TrajectoryPlannerROS/latch_xy_goal_tolerance: False
* /move_base/TrajectoryPlannerROS/max_rotational_vel: 0.15
* /move_base/TrajectoryPlannerROS/max_vel_theta: 0.15
* /move_base/TrajectoryPlannerROS/max_vel_x: 0.3
* /move_base/TrajectoryPlannerROS/max_vel_y: 0.0
* /move_base/TrajectoryPlannerROS/meter_scoring: True
* /move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.5
* /move_base/TrajectoryPlannerROS/min_vel_theta: -0.15
* /move_base/TrajectoryPlannerROS/min_vel_x: 0.1
* /move_base/TrajectoryPlannerROS/min_vel_y: 0.0
* /move_base/TrajectoryPlannerROS/occdist_scale: 0.1
* /move_base/TrajectoryPlannerROS/oscillation_reset_dist: 0.05
* /move_base/TrajectoryPlannerROS/pdist_scale: 0.8
* /move_base/TrajectoryPlannerROS/prune_plan: True
* /move_base/TrajectoryPlannerROS/publish_cost_grid_pc: False
* /move_base/TrajectoryPlannerROS/sim_granularity: 0.025
* /move_base/TrajectoryPlannerROS/sim_time: 1.0
* /move_base/TrajectoryPlannerROS/simple_attractor: False
* /move_base/TrajectoryPlannerROS/vtheta_samples: 20
* /move_base/TrajectoryPlannerROS/vx_samples: 8
* /move_base/TrajectoryPlannerROS/vy_samples: 0
* /move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.3
* /move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.15
* /move_base/clearing_rotation_allowed: False
* /move_base/controller_frequency: 5.0
* /move_base/global_costmap/footprint: [[0.2, 0.2], [0 ...
(more) |
| 2017-02-09 18:04:28 -0500 | received badge | ● Notable Question
(source)
|
| 2017-02-09 18:03:57 -0500 | received badge | ● Notable Question
(source)
|
| 2017-02-09 02:30:36 -0500 | commented question | Robot does not listen to 2d pose estimate |
| 2017-02-09 02:26:50 -0500 | received badge | ● Popular Question
(source)
|
| 2017-02-09 02:21:21 -0500 | commented question | Robot does not listen to 2d pose estimate I updated the question with the rosnode info /rviz_ sorry I tried using the preformatted text button but it didn't work |
| 2017-02-09 02:06:36 -0500 | commented question | Robot does not listen to 2d pose estimate Node [/rviz_5467461351]
Publications: None Subscriptions: None Services: None cannot contact [/rviz_5467461351]: unknown node |
| 2017-02-09 01:59:35 -0500 | received badge | ● Popular Question
(source)
|
| 2017-02-09 01:55:50 -0500 | commented question | Robot does not listen to 2d pose estimate |
| 2017-02-09 01:55:50 -0500 | received badge | ● Commentator
|
| 2017-02-09 01:47:20 -0500 | received badge | ● Editor
(source)
|
| 2017-02-09 01:46:56 -0500 | commented question | Robot does not listen to 2d pose estimate yes I am using amcl, initialpose has a connection to the /amcl. I am not using a remote machine it's on the same PC. I will post my rqt_graph if that helps |
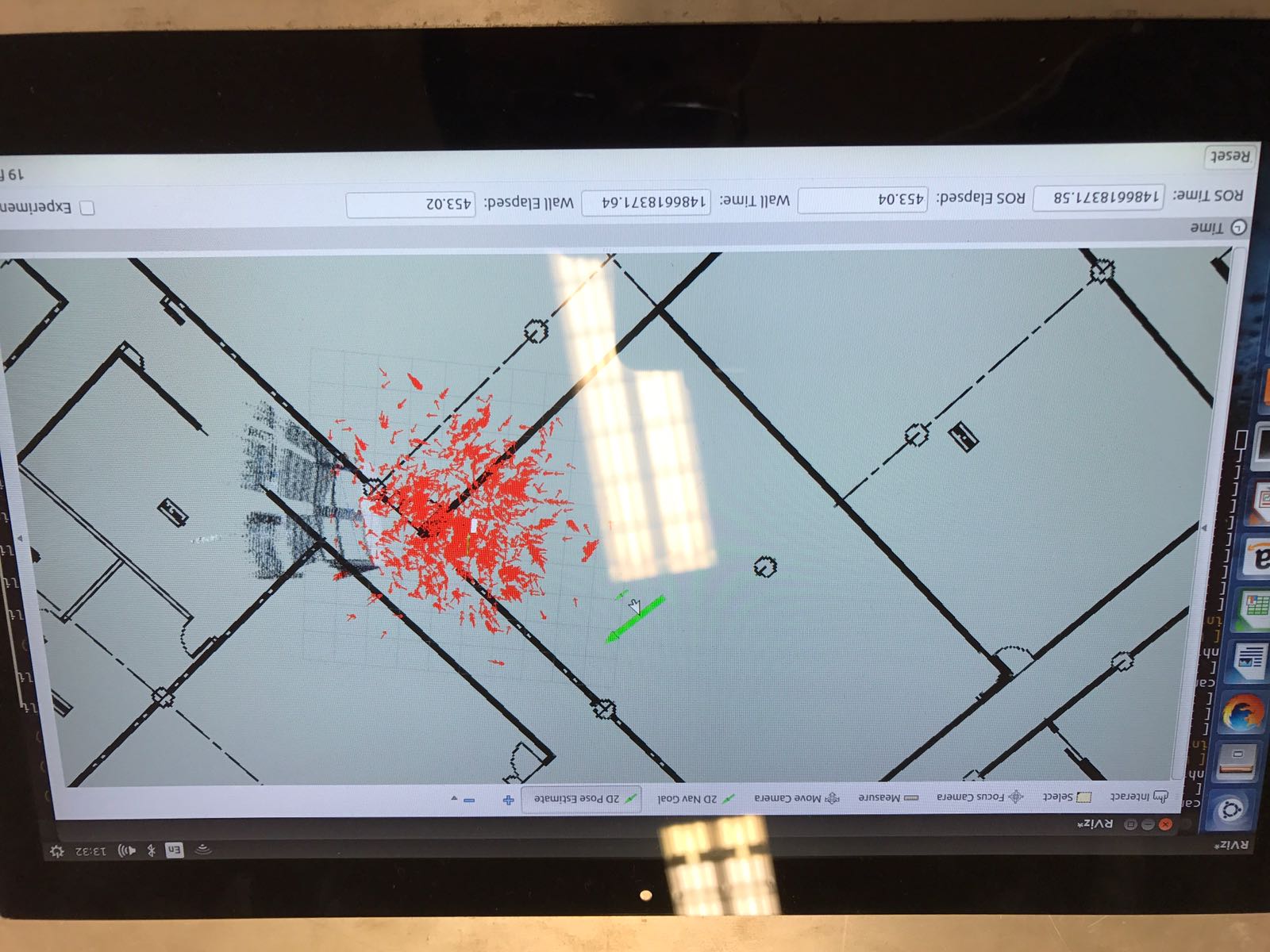
| 2017-02-08 23:40:25 -0500 | asked a question | Robot does not listen to 2d pose estimate when I try to tell it's 2d pose estimate it just stays where it is and show particle clouds around it's wrong location. that is shown in this image. I am very new to ros and i'm running out of time where learning step by step is more or less out of my options any help would be appreciated yinht@yinht-desktop:~$ rosnode info /rviz_1486627152348467684
--------------------------------------------------------------------------------
Node [/rviz_1486627152348467684]
Publications:
* /initialpose [geometry_msgs/PoseWithCovarianceStamped]
* /rosout [rosgraph_msgs/Log]
* /goal [geometry_msgs/PoseStamped]
Subscriptions:
* /camera/rgb/image_raw [sensor_msgs/Image]
* /scan2 [unknown type]
* /move_base/local_costmap/footprint [geometry_msgs/PolygonStamped]
* /tf [tf2_msgs/TFMessage]
* /scan [sensor_msgs/LaserScan]
* /tf_static [tf2_msgs/TFMessage]
* /particlecloud [geometry_msgs/PoseArray]
* /map_updates [unknown type]
* /map [nav_msgs/OccupancyGrid]
Services:
* /rviz_1486627152348467684/get_loggers
* /rviz_1486627152348467684/reload_shaders
* /rviz_1486627152348467684/set_logger_level
contacting node http://yinht-desktop:41402/ ...
Pid: 27477
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /tf
* to: /diffusion_tf (http://yinht-desktop:38259/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /camera_base_link2 (http://yinht-desktop:46817/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /amcl (http://yinht-desktop:42593/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /camera_base_link (http://yinht-desktop:37021/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /camera_base_link3 (http://yinht-desktop:43573/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /camera_base_link1 (http://yinht-desktop:35271/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /robot_state_publisher (http://yinht-desktop:38135/)
* direction: inbound
* transport: TCPROS
* topic: /tf_static
* to: /robot_state_publisher (http://yinht-desktop:38135/)
* direction: inbound
* transport: TCPROS
* topic: /particlecloud
* to: /amcl (http://yinht-desktop:42593/)
* direction: inbound
* transport: TCPROS
* topic: /camera/rgb/image_raw
* to: /camera/camera_nodelet_manager (http://yinht-desktop:41082/)
* direction: inbound
* transport: TCPROS
* topic: /move_base/local_costmap/footprint
* to: /move_base (http://yinht-desktop:34315/)
* direction: inbound
* transport: TCPROS
* topic: /map
* to: /map_server (http://yinht-desktop:41602/)
* direction: inbound
* transport: TCPROS
* topic: /scan
* to: /hokuyo_laser (http://yinht-desktop:44867/)
* direction: inbound
* transport: TCPROS
|
| 2017-02-08 21:55:25 -0500 | asked a question | How to make 2D nav goal work I'm a student working on my final year project all I have to do is make this custom robot to move using 2d nav goal however, the robot just doesn't move where I want it to i'm very close to the deadline and freaking out any help would be appreciated. This is the launch file that my seniors have been working on yinht@yinht-desktop:~$ roslaunch hostbot hostbot.launch
... logging to /home/yinht/.ros/log/79283f6a-ee79-11e6-bbfe-00215cbf656c/roslaunch-yinht-desktop-2930.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://yinht-desktop:39397/
SUMMARY
========
PARAMETERS
* /amcl/gui_publish_rate: 10.0
* /amcl/kld_err: 0.05
* /amcl/kld_z: 0.99
* /amcl/laser_lambda_short: 0.1
* /amcl/laser_likelihood_max_dist: 2.0
* /amcl/laser_max_beams: 30
* /amcl/laser_model_type: likelihood_field
* /amcl/laser_sigma_hit: 0.2
* /amcl/laser_z_hit: 0.5
* /amcl/laser_z_max: 0.05
* /amcl/laser_z_rand: 0.5
* /amcl/laser_z_short: 0.05
* /amcl/max_particles: 5000
* /amcl/min_particles: 500
* /amcl/odom_alpha1: 0.2
* /amcl/odom_alpha2: 0.2
* /amcl/odom_alpha3: 0.8
* /amcl/odom_alpha4: 0.2
* /amcl/odom_alpha5: 0.1
* /amcl/odom_frame_id: odom
* /amcl/odom_model_type: omni
* /amcl/recovery_alpha_fast: 0.0
* /amcl/recovery_alpha_slow: 0.0
* /amcl/resample_interval: 1
* /amcl/transform_tolerance: 0.1
* /amcl/update_min_a: 0.5
* /amcl/update_min_d: 0.2
* /arduino/baud: 115200
* /arduino/port: /dev/ttyUSB0
* /camera/camera_nodelet_manager/num_worker_threads: 4
* /camera/depth_rectify_depth/interpolation: 0
* /camera/driver/auto_exposure: True
* /camera/driver/auto_white_balance: True
* /camera/driver/color_depth_synchronization: False
* /camera/driver/depth_camera_info_url:
* /camera/driver/depth_frame_id: camera_depth_opti...
* /camera/driver/depth_registration: False
* /camera/driver/device_id: #1
* /camera/driver/rgb_camera_info_url:
* /camera/driver/rgb_frame_id: camera_rgb_optica...
* /diffusion_tf/angle_std_mean_deviation_deg: 10
* /diffusion_tf/angular_scale: 1.0
* /diffusion_tf/base_frame_id: base_link
* /diffusion_tf/base_width: 0.34
* /diffusion_tf/linear_scale: 1.0
* /diffusion_tf/odom_frame_id: odom
* /diffusion_tf/pos_std_mean_deviation: 0.1
* /diffusion_tf/publish_tf: True
* /diffusion_tf/rate: 40
* /diffusion_tf/vit_ang_std_mean_deviation_deg: 3
* /diffusion_tf/vit_std_mean_deviation_deg: 1
* /hokuyo_laser/calibrate_time: False
* /hokuyo_laser/frame_id: base_laser_link
* /hokuyo_laser/intensity: False
* /hokuyo_laser/max_ang: 1.4
* /hokuyo_laser/min_ang: -1.4
* /hokuyo_laser/port: /dev/ttyACM0
* /move_base/TrajectoryPlannerROS/acc_lim_theta: 3.0
* /move_base/TrajectoryPlannerROS/acc_lim_x: 2.0
* /move_base/TrajectoryPlannerROS/acc_lim_y: 0.0
* /move_base/TrajectoryPlannerROS/angular_sim_granularity: 0.025
* /move_base/TrajectoryPlannerROS/dwa: True
* /move_base/TrajectoryPlannerROS/escape_vel: -0.05
* /move_base/TrajectoryPlannerROS/gdist_scale: 0.6
* /move_base/TrajectoryPlannerROS/heading_lookahead: 0.325
* /move_base/TrajectoryPlannerROS/heading_scoring: False
* /move_base/TrajectoryPlannerROS/heading_scoring_timestep: 0.8
* /move_base/TrajectoryPlannerROS/holonomic_robot: False
* /move_base/TrajectoryPlannerROS/latch_xy_goal_tolerance: False
* /move_base/TrajectoryPlannerROS/max_rotational_vel: 0.15
* /move_base/TrajectoryPlannerROS/max_vel_theta: 0.15
* /move_base/TrajectoryPlannerROS/max_vel_x: 0.3
* /move_base/TrajectoryPlannerROS/max_vel_y: 0.0
* /move_base/TrajectoryPlannerROS/meter_scoring: True
* /move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.5
* /move_base/TrajectoryPlannerROS/min_vel_theta: -0.15
* /move_base/TrajectoryPlannerROS/min_vel_x: 0.1
* /move_base/TrajectoryPlannerROS/min_vel_y: 0.0
* /move_base/TrajectoryPlannerROS/occdist_scale: 0.1
* /move_base/TrajectoryPlannerROS/oscillation_reset_dist: 0.05
* /move_base/TrajectoryPlannerROS/pdist_scale: 0.8
* /move_base/TrajectoryPlannerROS/prune_plan: True
* /move_base/TrajectoryPlannerROS/publish_cost_grid_pc: False
* /move_base/TrajectoryPlannerROS/sim_granularity: 0.025
* /move_base/TrajectoryPlannerROS/sim_time: 1.0
* /move_base/TrajectoryPlannerROS/simple_attractor: False
* /move_base/TrajectoryPlannerROS/vtheta_samples: 20
* /move_base/TrajectoryPlannerROS/vx_samples: 8
* /move_base/TrajectoryPlannerROS/vy_samples: 0
* /move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.3
* /move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.15
* /move_base/clearing_rotation_allowed: False
* /move_base/controller_frequency: 5.0
* /move_base/global_costmap/footprint: [[0.2, 0.2], [0.2...
* /move_base/global_costmap/global_frame: /map
* /move_base/global_costmap ...
(more) |
| 2017-02-08 02:21:25 -0500 | commented question | RViz 2d Nav Goal sends robot backwards @ahendrix : I increased the speed of the x-vel to 0.30 now the robot appears to be moving but in the opposite direction I want it to. |
| 2017-02-08 02:18:40 -0500 | commented question | RViz 2d Nav Goal sends robot backwards @ahendrix : there is an increase in x-vel although it appears that the robot just shakes in place. any idea why? |
| 2017-02-07 22:03:58 -0500 | commented question | RViz 2d Nav Goal sends robot backwards @burf2000 that wouldn't make sense since the robot works fine using keyboard movement. |
| 2017-02-07 05:10:57 -0500 | received badge | ● Notable Question
(source)
|
| 2017-02-06 22:06:26 -0500 | received badge | ● Popular Question
(source)
|
| 2017-02-06 21:46:20 -0500 | commented question | RViz 2d Nav Goal sends robot backwards |
| 2017-02-06 21:32:12 -0500 | commented question | RViz 2d Nav Goal sends robot backwards it's a custom robot, it was a handed down project, where do I find cmd_vel topic? the custom robot is able to do "roslaunch rbx_1_nav keyboard_teleop.launch" where i'm able to move the robot around with a keyboard along with a custom launch file which activates the nodes as far as i'm aware |
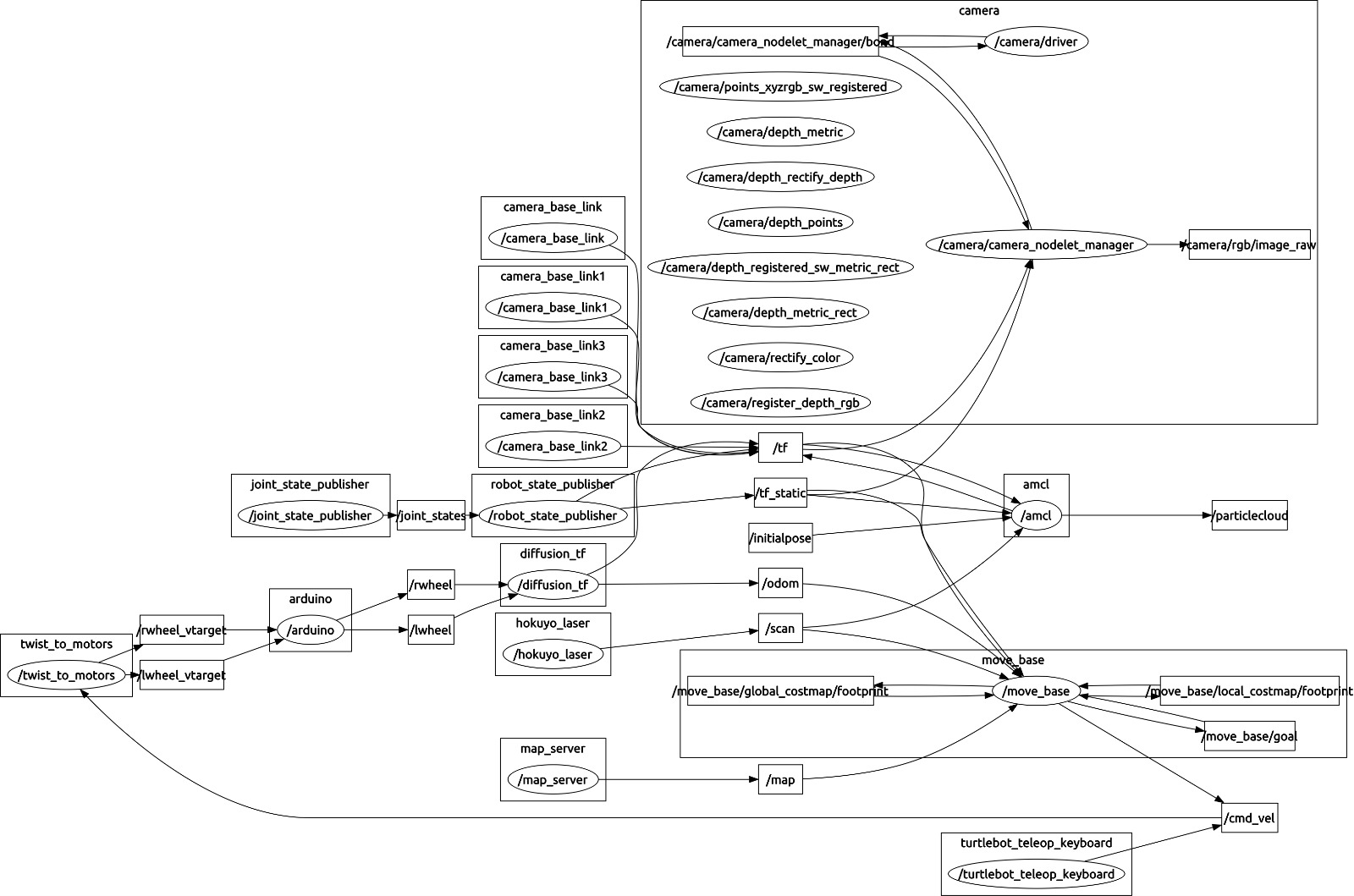
| 2017-02-06 20:51:12 -0500 | asked a question | RViz 2d Nav Goal sends robot backwards When I try to use the 2D Nav Goal the robot starts reversing at pretty high speeds. Any guides on where to start to solve the problem? Ask me for any launch files and such that you need to see as i'm new to ROS. Thank you in advance. this is a picture of the rqt_graph 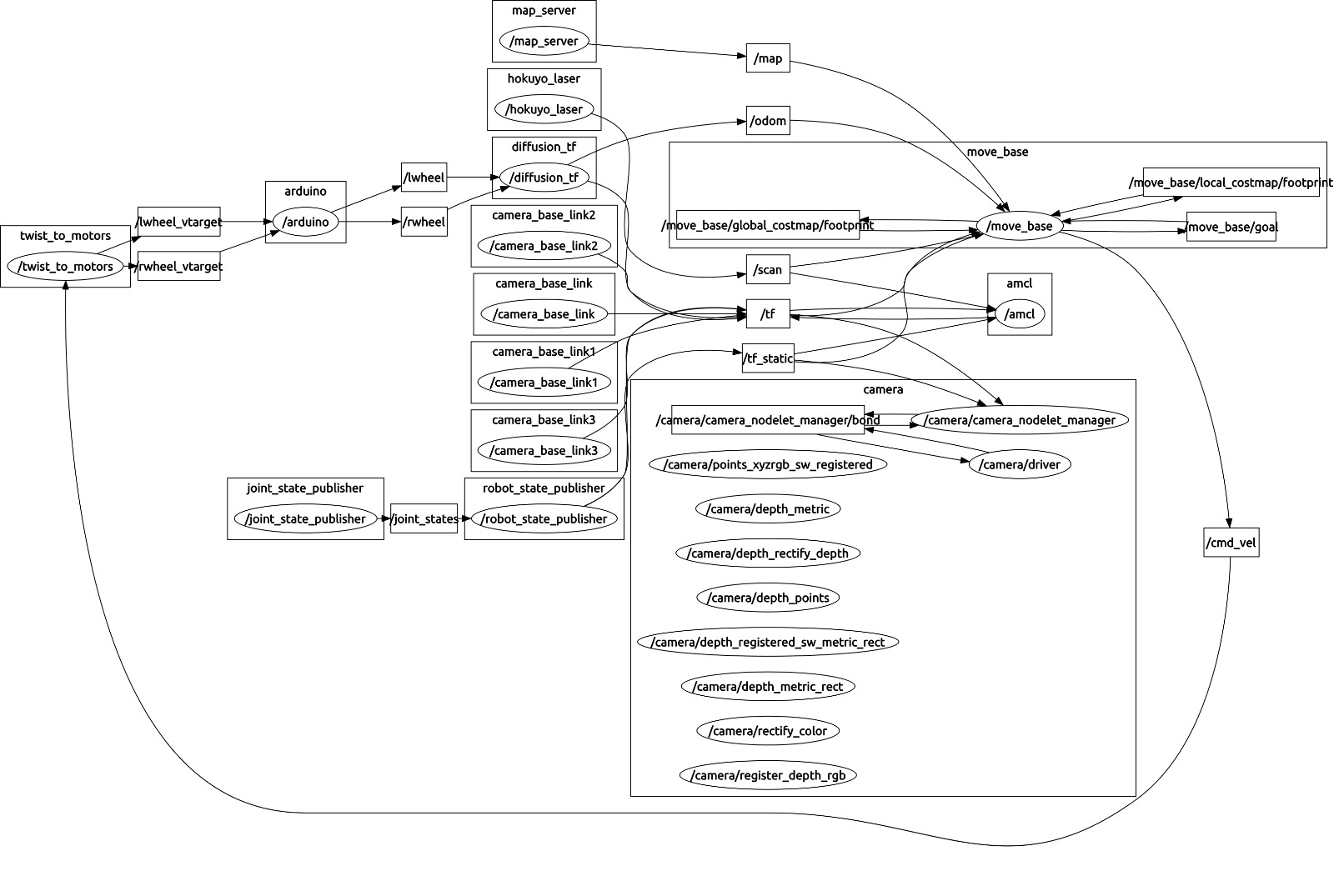
|
| 2017-02-06 05:35:16 -0500 | received badge | ● Student
(source)
|
| 2017-01-24 06:54:42 -0500 | received badge | ● Popular Question
(source)
|
| 2017-01-23 21:21:53 -0500 | asked a question | *.cfg: permission denied while building workspace I am making a custom robot for my final year project, for the robot to work, I was given a custom catkin_ws file.
I followed the steps mention here http://answers.ros.org/question/19390... and after following the steps, this occurred. ros@ros-desktop:~/catkin_ws$ catkin_make
Base path: /home/ros/catkin_ws
Source space: /home/ros/catkin_ws/src
Build space: /home/ros/catkin_ws/build
Devel space: /home/ros/catkin_ws/devel
Install space: /home/ros/catkin_ws/install
####
#### Running command: "make cmake_check_build_system" in "/home/ros/catkin_ws/build"
####
####
#### Running command: "make -j4 -l4" in "/home/ros/catkin_ws/build"
####
[ 0%] [ 0%] Built target _rosserial_arduino_generate_messages_check_deps_Test
Built target _rosserial_arduino_generate_messages_check_deps_Adc
[ 0%] Built target _rosserial_msgs_generate_messages_check_deps_Log
[ 0%] Built target _rosserial_msgs_generate_messages_check_deps_RequestParam
[ 6%] Built target serial
[ 11%] Built target merlin_hostbot
[ 11%] [ 11%] Built target _rosserial_msgs_generate_messages_check_deps_RequestMessageInfo
Built target _rosserial_msgs_generate_messages_check_deps_TopicInfo
[ 11%] Built target _rosserial_msgs_generate_messages_check_deps_RequestServiceInfo
[ 13%] Built target quaternion2yaw_node
[ 16%] [ 20%] Built target stm_hostbot
Generating dynamic reconfigure files from cfg/CalibrateAngular.cfg: /home/ros/catkin_ws/devel/include/rbx1_nav/CalibrateAngularConfig.h /home/ros/catkin_ws/devel/lib/python2.7/dist-packages/rbx1_nav/cfg/CalibrateAngularConfig.py
/home/ros/catkin_ws/build/rbx1/rbx1_nav/setup_custom_pythonpath.sh: 4: exec: /home/ros/catkin_ws/src/rbx1/rbx1_nav/cfg/CalibrateAngular.cfg: Permission denied
make[2]: * [/home/ros/catkin_ws/devel/include/rbx1_nav/CalibrateAngularConfig.h] Error 126
make[1]: * [rbx1/rbx1_nav/CMakeFiles/rbx1_nav_gencfg.dir/all] Error 2
make[1]: * Waiting for unfinished jobs....
[ 23%] [ 25%] Built target urg_c_wrapper
Generating dynamic reconfigure files from cfg/URG.cfg: /home/ros/catkin_ws/devel/include/urg_node/URGConfig.h /home/ros/catkin_ws/devel/lib/python2.7/dist-packages/urg_node/cfg/URGConfig.py
/home/ros/catkin_ws/build/urg_node/setup_custom_pythonpath.sh: 4: exec: /home/ros/catkin_ws/src/urg_node/cfg/URG.cfg: Permission denied
make[2]: * [/home/ros/catkin_ws/devel/include/urg_node/URGConfig.h] Error 126
make[1]: * [urg_node/CMakeFiles/urg_node_gencfg.dir/all] Error 2
[ 27%] Built target user_publisher
make: * [all] Error 2
Invoking "make -j4 -l4" failed
Any help would be greatly appreciated, thanks |

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.