The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-01-23 07:09:31 -0500 | received badge | ● Famous Question (source) |
| 2023-01-13 11:38:56 -0500 | received badge | ● Notable Question (source) |
| 2022-10-16 10:01:10 -0500 | commented answer | Configuring ROS2 for OpenCV and C++ Thank you very much for such a detailed answer, Sander ! Was very helpful. Regards |
| 2022-10-16 08:47:52 -0500 | marked best answer | Configuring ROS2 for OpenCV and C++ How to properly setup the ROS2 workspace (i.e., cmakelists and package.xml, etc.) for using OpenCV and C++ ? I could not find proper examples for that. Thanks in advance. |
| 2022-10-16 08:47:43 -0500 | received badge | ● Popular Question (source) |
| 2022-10-08 09:24:28 -0500 | edited question | Configuring ROS2 for OpenCV and C++ Configuring ROS2 for OpenCV with C++ How to properly setup the ROS2 workspace (i.e., cmakelists and package.xml, etc.) f |
| 2022-10-08 09:11:14 -0500 | asked a question | Configuring ROS2 for OpenCV and C++ Configuring ROS2 for OpenCV with C++ How to properly setup the ROS2 workspace (i.e., cmakelists and package.xml, etc.) f |
| 2022-10-07 13:24:45 -0500 | received badge | ● Famous Question (source) |
| 2021-09-13 11:51:19 -0500 | received badge | ● Notable Question (source) |
| 2021-08-12 16:21:11 -0500 | received badge | ● Famous Question (source) |
| 2021-08-01 22:10:18 -0500 | received badge | ● Popular Question (source) |
| 2021-07-30 22:31:07 -0500 | edited answer | Global Planning and Stop Replanning Actually, i wanted to do the reverse :) My robot just stops when a dynamic obstacle is detected along the way. Was wonde |
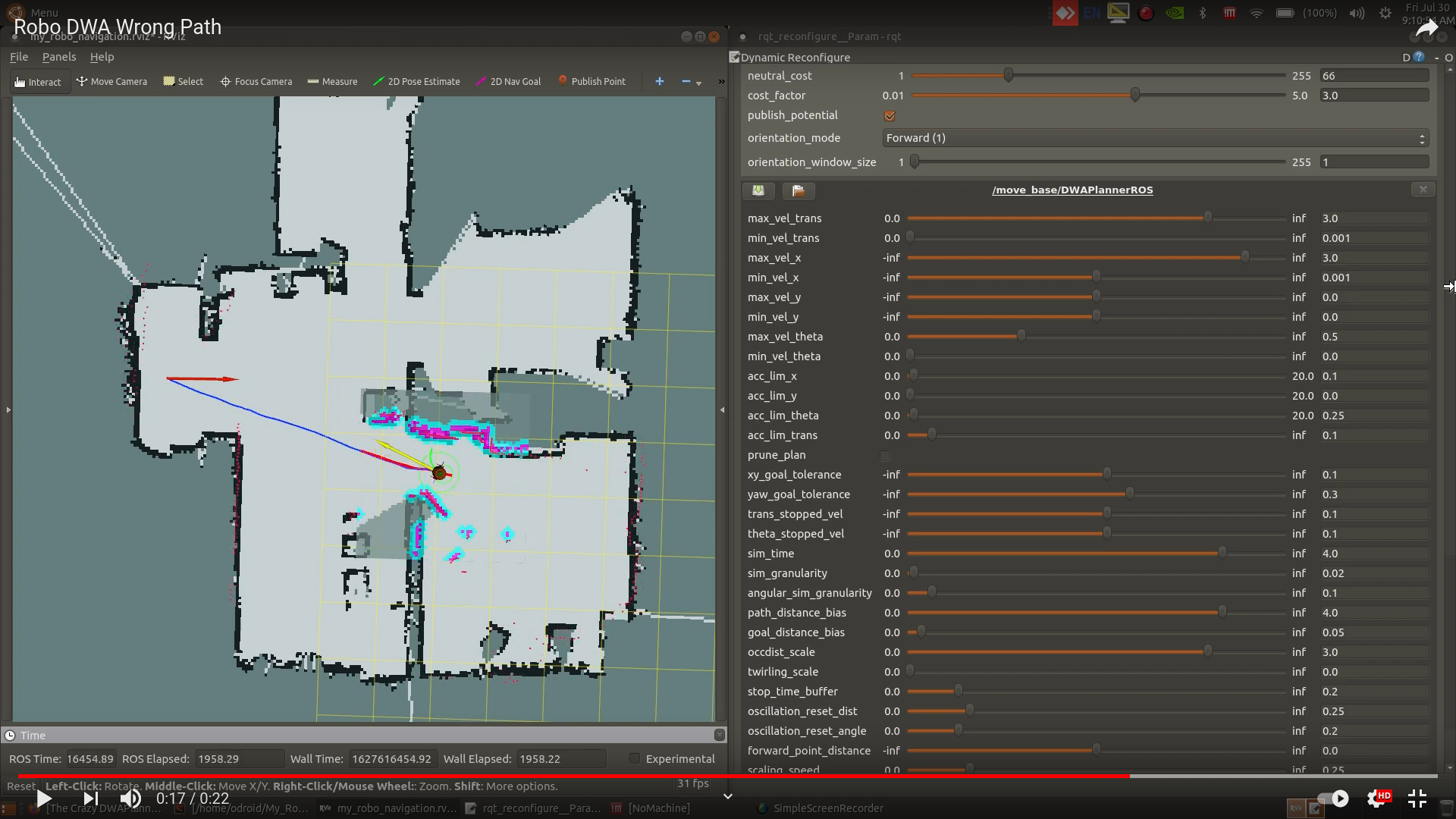
| 2021-07-30 21:35:52 -0500 | edited answer | DWA Planner path deflects and prevents smooth movement Ok, i guess i found the answer. By updating to the following values solved the issue: acc_lim_theta: 1.0 max_vel_theta: |
| 2021-07-30 15:55:02 -0500 | received badge | ● Self-Learner (source) |
| 2021-07-30 09:37:53 -0500 | answered a question | Global Planning and Stop Replanning Actually, i wanted to do the reverse :) My robot just stops when a dynamic obstacle is detected along the way. Was wonde |
| 2021-07-30 09:37:53 -0500 | received badge | ● Rapid Responder (source) |
| 2021-07-30 09:26:22 -0500 | marked best answer | DWA Planner path deflects and prevents smooth movement Hi, here's the video. Problem occurs at 0:09 and 0:17. When i give goal to the robot, DWA planner produces local path but, after the robot gains good velocity, it produces a local path which greatly deflects from the global path and causes the robot to slow down and halt for a few moments before continuing.
This reduces the performance of the robot. Any suggestions on how to make the movement smooth ? |
| 2021-07-30 09:25:37 -0500 | answered a question | DWA Planner path deflects and prevents smooth movement Ok, i guess i found the answer. By updating to the following values solved the issue: acc_lim_theta: 1.0 max_vel_theta: |
| 2021-07-30 09:25:37 -0500 | received badge | ● Rapid Responder (source) |
| 2021-07-30 01:38:07 -0500 | commented question | dwa_planner strange behavior (video) I think, the problem is with the "min_vel_trans: 0.3" parameter in DWA configuration. Set it to very low value, say 0.0 |
| 2021-07-29 23:13:07 -0500 | edited question | DWA Planner path deflects and prevents smooth movement DWA Planner path deflects and prevents smooth movement Hi, here's the video. Problem occurs at 0:09 and 0:17. When i giv |
| 2021-07-29 23:09:44 -0500 | asked a question | DWA Planner path deflects and prevents smooth movement DWA Planner path deflects and prevents smooth movement Hi, here's the video. Problem occurs at 0:09 and 0:17. When i giv |
| 2021-07-26 06:38:53 -0500 | commented question | Actual wheels RPM velocities from ticks, target velocity and robot velocity I think you found the solution after all this time. This package named "differential_drive" (link below) does the calcul |
| 2021-07-26 06:38:15 -0500 | commented question | Actual wheels RPM velocities from ticks, target velocity and robot velocity I think you found the solution after all this time. This package does the calculation of individual motor velocities as |
| 2021-05-08 09:17:26 -0500 | received badge | ● Notable Question (source) |
| 2021-05-05 10:28:11 -0500 | received badge | ● Popular Question (source) |
| 2021-05-05 03:00:18 -0500 | asked a question | ROS Navigation: Robot doesn't move, rotates and fails to get a plan ROS Navigation: Robot doesn't move, rotates and fails to get a plan Made a simple custom robot in simulation, tuned navi |
| 2020-04-15 08:58:43 -0500 | received badge | ● Enlightened (source) |
| 2020-04-15 08:58:43 -0500 | received badge | ● Good Answer (source) |
| 2020-04-01 03:54:30 -0500 | received badge | ● Famous Question (source) |
| 2019-09-20 02:40:37 -0500 | marked best answer | Placing interactive markers on joints of a robot model using Ros3djs I was trying to tele-operate a robot arm via interactive markers placed on each joint of the model displayed in a web page. I am planning to use ros3djs to address this task. I went through the tutorials mentioned in the package website. But, i cannot understand how to place markers on each joint of the robot arm. How can i do this ? |
| 2019-09-20 02:40:17 -0500 | received badge | ● Famous Question (source) |
| 2019-09-20 02:12:18 -0500 | marked best answer | Control turtlesim via webpage Hi all, I was trying to control turtlesim from a webpage in my android phone. I followed this tutorial: http://iguanatronics.com/simple-tutor... I ran "roslaunch rosbridge_server rosbridge_websocket.launch" and "rosrun turtlesim turtlesim_node" in my laptop. Also i opened the web page to control the turtlesim in my android mobile. But, the web page displays: "Error connecting to websocket server. Connection to websocket server closed." Please help ! |
| 2019-08-19 12:41:57 -0500 | received badge | ● Popular Question (source) |
| 2019-08-19 12:41:57 -0500 | received badge | ● Notable Question (source) |
| 2019-04-01 10:13:37 -0500 | received badge | ● Famous Question (source) |
| 2018-10-18 13:53:22 -0500 | received badge | ● Nice Answer (source) |
| 2018-10-03 09:07:57 -0500 | marked best answer | Connecting different computers via Rosbridge Hi, I was trying to control turtlesim running on my ros computer via another non ros computer. I used the following html file in my non ros computer: |
| 2018-10-03 09:07:57 -0500 | received badge | ● Teacher (source) |
| 2018-10-03 09:07:57 -0500 | received badge | ● Self-Learner (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.