The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-10-19 13:55:43 -0500 | marked best answer | How to remap topic in a ROS2 launch file? Hi everyone, I am setting up a navigation2 launch file. I have used this one as a reference, and everything seems to work. However, I need to remap the Thanks for the help |
| 2022-02-23 15:32:03 -0500 | received badge | ● Famous Question (source) |
| 2022-01-31 13:15:58 -0500 | received badge | ● Great Question (source) |
| 2021-10-18 11:35:36 -0500 | received badge | ● Good Question (source) |
| 2021-06-18 05:08:28 -0500 | received badge | ● Famous Question (source) |
| 2021-06-17 01:10:04 -0500 | received badge | ● Notable Question (source) |
| 2021-06-17 01:10:04 -0500 | received badge | ● Popular Question (source) |
| 2021-06-11 08:25:35 -0500 | asked a question | ros1_bridge extremely slow when passing images ros1_bridge extremely slow when passing images Hello everyone, I am using ros1_bridge to convert image messages coming |
| 2021-05-07 13:27:51 -0500 | received badge | ● Notable Question (source) |
| 2021-04-27 07:54:22 -0500 | received badge | ● Famous Question (source) |
| 2021-04-24 18:35:28 -0500 | received badge | ● Popular Question (source) |
| 2021-04-22 12:55:03 -0500 | received badge | ● Favorite Question (source) |
| 2021-04-22 11:09:15 -0500 | received badge | ● Nice Question (source) |
| 2021-04-22 10:49:02 -0500 | received badge | ● Student (source) |
| 2021-04-22 05:23:05 -0500 | asked a question | How to remap topic in a ROS2 launch file? How to remap topic in a ROS2 launch file? Hi everyone, I am setting up a navigation2 launch file. I have used this one |
| 2021-04-03 09:54:26 -0500 | received badge | ● Self-Learner (source) |
| 2021-04-03 09:35:36 -0500 | received badge | ● Notable Question (source) |
| 2021-04-03 09:35:36 -0500 | received badge | ● Famous Question (source) |
| 2021-02-25 05:15:38 -0500 | received badge | ● Notable Question (source) |
| 2021-02-25 05:15:38 -0500 | received badge | ● Popular Question (source) |
| 2021-02-03 11:32:37 -0500 | edited answer | How to echo messages published on a particular topic by a node? It is not clear from your description, but I assume you are talking about a situation where multiple nodes are publishin |
| 2021-02-03 11:21:06 -0500 | answered a question | How to echo messages published on a particular topic by a node? It is not clear from your description, but I assume you are talking about a situation where multiple nodes are publishin |
| 2021-02-03 11:21:06 -0500 | received badge | ● Rapid Responder (source) |
| 2021-02-02 10:52:06 -0500 | commented answer | message_filters in C++ not subscribing to topics when implemented in a class Of course! Thanks a lot! |
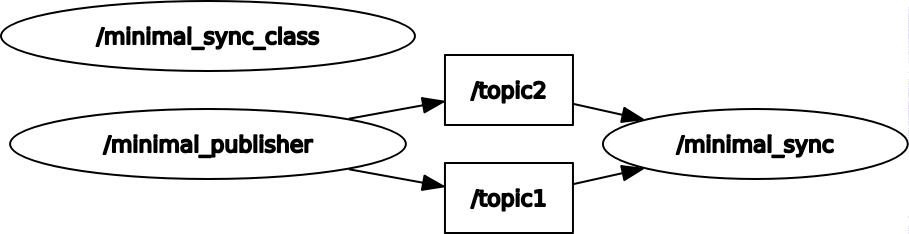
| 2021-02-02 10:49:42 -0500 | marked best answer | message_filters in C++ not subscribing to topics when implemented in a class Hi all, I am having some issues with message filters, but I am not sure if I am doing something wrong or if there is a bug somewhere. After some difficulties, I decided to implement a couple of minimal examples to describe the problem. So, the toy example is very simple, I have a publisher node that publishes on two topics ( Then, I have implemented two C++ nodes using Here are the nodes. Whit the classes: And this one without the class: If I run all the three nodes together, this is the result in rqt_graph:
As you can see, the one without the class is connected to the topics and it is working properly, while the other with the class it's completely disconnected. I am honestly lost, and can't figure out where the problem is. |
| 2021-02-02 10:13:08 -0500 | asked a question | message_filters in C++ not subscribing to topics when implemented in a class message_filters in C++ not subscribing to topics when implemented in a class Hi all, I am having some issues with messag |
| 2021-01-27 09:41:08 -0500 | received badge | ● Popular Question (source) |
| 2021-01-27 08:30:55 -0500 | marked best answer | PointCloud2 visualisation in rviz2 EDIT: Apparently the problem is not about visualisation or rviz. I tried to implement a minimal subscriber that receives point cloud messages and just print a notification and it doesn't work. The callback is never called. However, if I use
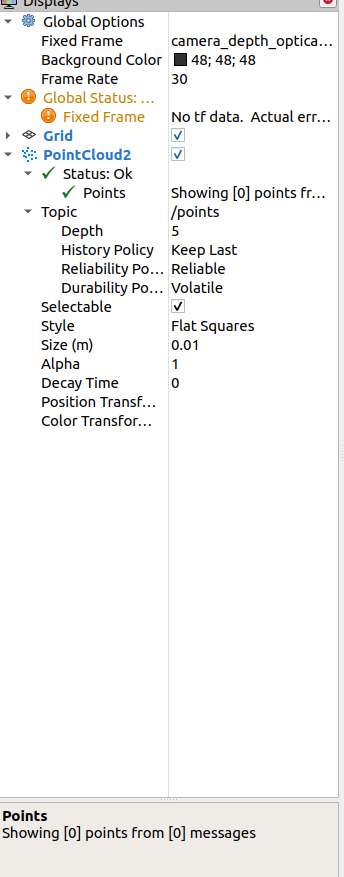
Am I missing something? END EDIT Hi all, I am finally migrating from ROS1 to ROS2 and, currently, I am trying to implement nodes to process depth images and point clouds. I have a node that reads depth images from a folder and publishes them as messages paired with the corresponding camera calibration message. These depth messages are feed to This is the output I get from echoing the topic: From here the message seems fine and well-formed. However, when I try to see in rviz2 I get nothing. At first I thought it was a problem with tf, so I tried to publish a dummy transformation between This is what I get in rviz2:
No matter what it keeps saying: "Showing [0] points from [0] messages" Any idea of what could be the problem? |
| 2021-01-27 08:30:45 -0500 | answered a question | PointCloud2 visualisation in rviz2 To expand on the solution provided in the previous answer. depth_image_proc::PointCloudXyzNode publisher has a "sensor |
| 2021-01-27 08:30:45 -0500 | received badge | ● Rapid Responder (source) |
| 2021-01-27 08:10:51 -0500 | commented answer | PointCloud2 visualisation in rviz2 Sorry, I answered your comment saying that this change did nothing, but this is actually the solution. I was in a rush a |
| 2021-01-27 06:29:47 -0500 | received badge | ● Enthusiast |
| 2021-01-26 11:55:23 -0500 | edited question | PointCloud2 visualisation in rviz2 PointCloud2 visualisation in rviz2 EDIT: Apparently the problem is not about visualisation or rviz. I tried to implemen |
| 2021-01-26 09:58:57 -0500 | edited question | PointCloud2 visualisation in rviz2 PointCloud2 visualisation in rviz2 Hi all, I am finally migrating from ROS1 to ROS2 and, currently, I am trying to impl |
| 2021-01-26 09:58:57 -0500 | received badge | ● Editor (source) |
| 2021-01-26 09:56:39 -0500 | edited question | PointCloud2 visualisation in rviz2 PointCloud2 visualisation in rviz2 Hi all, I am finally migrating from ROS1 to ROS2 and, currently, I am trying to impl |
| 2021-01-26 09:54:28 -0500 | asked a question | PointCloud2 visualisation in rviz2 PointCloud2 visualisation in rviz2 Hi all, I am finally migrating from ROS1 to ROS2 and, currently, I am trying to impl |
| 2019-11-20 09:31:11 -0500 | received badge | ● Notable Question (source) |
| 2019-11-18 04:44:33 -0500 | received badge | ● Popular Question (source) |
| 2019-11-14 11:12:33 -0500 | asked a question | tf2 problem with move_base plugin tf2 problem with move_base plugin Hi all, I implemented a local planner for move_base using pluginlib. It was working f |
| 2019-03-01 16:36:29 -0500 | received badge | ● Nice Answer (source) |
| 2019-03-01 16:36:22 -0500 | marked best answer | How to check for free cells in a line in the costmap? Hello, What I want to do is something similar to a raycast. From a specific position draw a line and get the list of all the free cells in that line. The line has a maximum length, but it has to stop if it reach an obstacle. Is there an existing API for that? Or I need to implement it myself? Thanks! |
| 2018-08-12 19:31:57 -0500 | received badge | ● Famous Question (source) |
| 2018-08-10 22:47:19 -0500 | received badge | ● Self-Learner (source) |
| 2018-08-10 22:47:19 -0500 | received badge | ● Teacher (source) |
| 2018-08-10 12:30:06 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.