
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-12-01 12:54:41 -0500 | received badge | ● Famous Question (source) |
| 2021-01-05 17:05:11 -0500 | received badge | ● Famous Question (source) |
| 2019-12-03 00:33:47 -0500 | commented question | Timestamps of static transforms Maybe there's time difference between the computers? You should try running chrony server on one of them and use the oth |
| 2019-08-07 13:35:20 -0500 | received badge | ● Notable Question (source) |
| 2019-08-04 04:12:51 -0500 | received badge | ● Famous Question (source) |
| 2019-07-13 05:48:01 -0500 | commented answer | kuka kr10r1100 sixx "floats" above ground_plane in Gazebo for example, look at the following command: rosrun gazebo_ros spawn_model -file rospack find MYROBOT_description/urdf/MY |
| 2019-07-13 05:47:12 -0500 | commented answer | kuka kr10r1100 sixx "floats" above ground_plane in Gazebo for example, look at the following command: rosrun gazebo_ros spawn_model -file rospack find MYROBOT_description/urdf/MY |
| 2019-04-16 12:39:52 -0500 | received badge | ● Notable Question (source) |
| 2018-12-26 21:14:11 -0500 | received badge | ● Famous Question (source) |
| 2018-12-11 09:37:06 -0500 | received badge | ● Famous Question (source) |
| 2018-10-10 18:28:02 -0500 | received badge | ● Notable Question (source) |
| 2018-10-10 10:43:26 -0500 | commented question | tf works only in one way I increased the publish rate to 1000Hz and this error is gone, but now I get the original error again. |
| 2018-10-10 10:38:27 -0500 | commented question | tf works only in one way I just tried using tf static_transform_publisher. Now I get this error when base_link is the fixed frame Message remove |
| 2018-10-10 02:58:10 -0500 | received badge | ● Popular Question (source) |
| 2018-10-10 02:54:19 -0500 | commented question | tf works only in one way I added the rqt_tf_tree image. I did not use tf static_transform_publisher, I will try it, thanks. |
| 2018-10-10 02:53:48 -0500 | edited question | tf works only in one way tf works only in one way Using ROS kinetic on Ubuntu 16.04. I have a urdf description of an industrial robot which work |
| 2018-10-09 02:17:34 -0500 | asked a question | tf works only in one way tf works only in one way Using ROS kinetic on Ubuntu 16.04. I have a urdf description of an industrial robot which work |
| 2018-09-14 17:28:16 -0500 | marked best answer | ROS-I trajectory downloading using TYPE 11 instead of 12? I want to use the trajectory downloading method in order to send trajectory commands to my robot controller. As written below, the trajectory downloading method should use the Joint trajectory message (JOINT_TRAJ): However, the JointTrajectoryDownloader class used in the generic_joint_downloader_node.cpp, has a method send_to_robot which converts each Joint trajectory point from the Joint trajectory array into a simple message and sends it (with type JOINT_TRAJ_PT = 11) A piece of code from the send_to_robot method: So I don't understand how should I create a message handler for the JOINT_TRAJ type if what the server gets is only JOINT_TRAJ_PT messages. An othere matter, this send_to_robot method adds a sequence to the first and last JOINT_TRAJ_PT messages so it would be possible to know where the path starts and where it ends: But I don't understand how could my massage handler know how to read this sequence from the sent ByteArray. this sequence is not included in one of the typical simple message types, so how could I know if the integer I'm bytes I'm reading are sequence or joint data? I desperately need help here, thank you! |
| 2018-08-27 04:38:46 -0500 | received badge | ● Popular Question (source) |
| 2018-08-27 03:56:01 -0500 | commented question | clarification of PositionJointInterface mechanism Anyway, the IK won't solve the issue I'm dealing with, which is how to alter the trajectory created by the controller - |
| 2018-08-27 03:55:43 -0500 | commented question | clarification of PositionJointInterface mechanism Anyway, the IK won't solve the issue I'm dealing with, which is how to alter the trajectory created by the controller - |
| 2018-08-27 03:55:22 -0500 | commented question | clarification of PositionJointInterface mechanism Anyway, the IK won't solve the issue I'm dealing which is how to alter the trajectory created by the controller - be car |
| 2018-08-27 03:55:22 -0500 | received badge | ● Commentator |
| 2018-08-27 03:51:59 -0500 | edited question | clarification of PositionJointInterface mechanism clarification of PositionJointInterface mechanism Hi, I've tried using the kuka_experimental rsi hw interface and it wo |
| 2018-08-27 03:51:10 -0500 | commented question | clarification of PositionJointInterface mechanism I'm trying to achieve Cartesian position control (KUKA knows how to handle it). I don't want IK because I have other cal |
| 2018-08-26 11:00:29 -0500 | edited question | clarification of PositionJointInterface mechanism clarification of PositionJointInterface mechanism Hi, I've tried using the kuka_experimental rsi hw interface and it wo |
| 2018-08-26 08:37:20 -0500 | asked a question | clarification of PositionJointInterface mechanism clarification of PositionJointInterface mechanism Hi, I've tried using the kuka_experimental rsi hw interface and it wo |
| 2018-08-08 00:55:31 -0500 | received badge | ● Notable Question (source) |
| 2018-06-24 03:22:51 -0500 | commented answer | Descartes package in ROS Kinetic Error https://github.com/ros-industrial-consortium/descartes/issues/226 |
| 2018-06-24 03:17:06 -0500 | commented answer | Descartes package in ROS Kinetic Error I also get the error: error: ‘logError’ was not declared in this scope. I switched logError with ROS_ERROR, and logInfor |
| 2018-06-24 03:16:45 -0500 | commented answer | Descartes package in ROS Kinetic Error I also get the error error: ‘logError’ was not declared in this scope I switched logError with ROS_ERROR, and logInform |
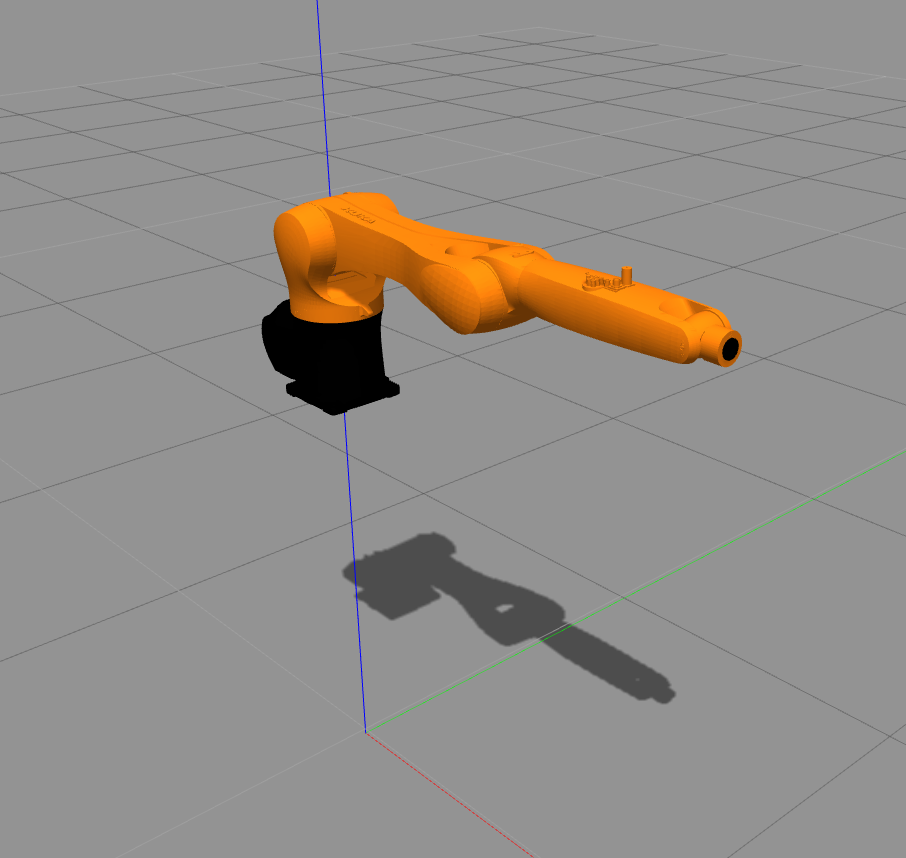
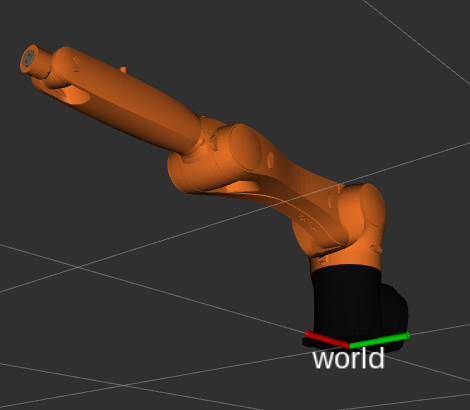
| 2018-03-22 03:52:52 -0500 | marked best answer | kuka kr10r1100 sixx "floats" above ground_plane in Gazebo I'm trying to simulate kuka kr10r1100 sixx in Gazebo - so far everything works great except that the robot spawns above the ground plane - i.e. it has an offset from the origin but only in the z axis (see the image below). Originally it would spawn and then slowly fall until hitting the ground. Then I set the base_link as fixed to the world frame (and also set it as static), so now it stays like that in the "air". I'm using ROS kinetic on Ubuntu 16.04.4. I took the kuka urdf file from the kuka_experimental repository I've checked that the STL files origin is where it supposed to be (by the way, the robot is located well in rviz (see below)). One more thing regarding rviz, it gives the following error for all the STL files: I followed these two tutorials: tutorial1 tutorial2 to update the urdf file to work with Gazebo. I added the transmissions (I don't see how this can affect my problem), I added this: and I added the gazebo colors (but the problem existed before the colors). I also added inertial properties to each link because without it Gazebo wouldn't accept the urdf file. Except these changes, I did not change anything. Did someone encountered something similar and have some suggestions how to solve it? Thanks! Gazebo
rviz
|
| 2018-03-21 14:38:37 -0500 | commented question | kuka kr10r1100 sixx "floats" above ground_plane in Gazebo Yeah, the reason for the slow falling is the same bug. Thanks! Although it doesn't answer the spawning in high z -> w |
| 2018-03-18 16:46:37 -0500 | received badge | ● Popular Question (source) |
| 2018-03-18 12:04:04 -0500 | received badge | ● Popular Question (source) |
| 2018-03-13 15:14:20 -0500 | asked a question | kuka kr10r1100 sixx "floats" above ground_plane in Gazebo kuka kr10r1100 sixx "floats" above ground_plane in Gazebo I'm trying to simulate kuka kr10r1100 sixx in Gazebo - so far |
| 2018-01-15 08:37:24 -0500 | received badge | ● Favorite Question (source) |
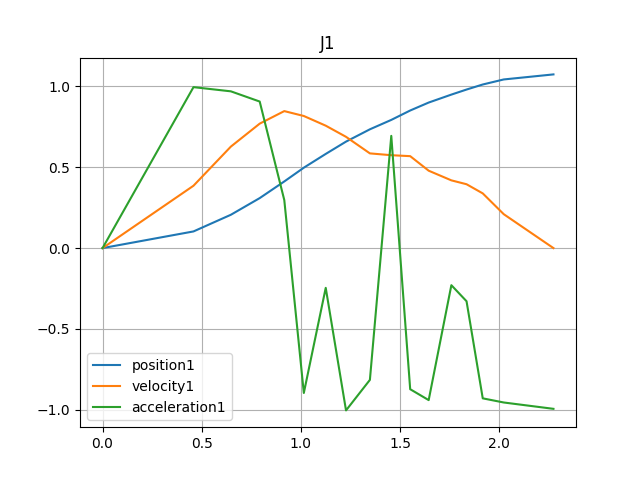
| 2018-01-15 06:00:24 -0500 | marked best answer | Motion planning for industrial robots EDIT Perhaps I should make the question even broader: I have a simple motion controller which needs to receive positions and velocities every 4ms (it's firmware is written in c++). I want to use ROS (currently using kinetic) to plan some trajectory (complicated or simple), and feed it to the motion controller. The problem I'm facing now is that the generated trajectory is not smooth and is not ready to be fed as is to the motion controller. Should I use other motion planning tools? or should I use tools to smoothen the trajectory? More deatails: I think I understand all of the tool-chain of ROS-I, but I'm missing the part of motion planning. I saw some questions about it, but most of them are pretty old. The ROS-I tutorials show two ways (in general) for motion planning. One is using MoveIt! and the other is using descartes (which is still experimental?). I've tried using MoveIt!, however, I need to interpolate the generated trajectories in constant time gaps and feed that to my controller (I do it in the robot driver - not with ROS). The trajectory that MoveIt! generates is pretty awful. The acceleration profile is really bad, and it affects the velocity and position. for example: image. Anyway, as I understand, MoveIt! is good for complicated motion planning tasks, for example obstacle avoidance, but the paths that it generates are not smooth. This question talks about interpolating, does the given answer is still valid? Someone wrote there that using ROS Industrial Trajectory Filter is the solution, but after reading about it and looking at the code, I don't think it solves the problem. What I'm looking for, is a motion planning tool that is more suitable for basic industrial robotics motion planning that generates smooth reliable paths. Is descartes the tool I'm looking for? Last question: I saw there are Inverse-Kinematics solvers (such as KDL, trac_IK) . Are they just used by the motion planners? Or do these packages also allow to make motion planning? |
| 2018-01-15 05:56:24 -0500 | commented question | Motion planning for industrial robots Thanks you |
| 2018-01-06 02:35:35 -0500 | received badge | ● Famous Question (source) |
| 2017-12-25 03:45:59 -0500 | commented question | Motion planning for industrial robots I saw this issue, and this issue I'm not sure if I fall to the same category and if this is fixed already |
| 2017-12-25 03:41:10 -0500 | edited question | Motion planning for industrial robots Motion planning for industrial robots EDIT Perhaps I should make the question even broader: I have a simple motion cont |
| 2017-12-25 03:40:18 -0500 | received badge | ● Notable Question (source) |
| 2017-12-24 11:54:58 -0500 | received badge | ● Popular Question (source) |
| 2017-12-24 07:04:58 -0500 | edited question | Motion planning for industrial robots Motion planning for industrial robots EDIT Perhaps I should make the question even broader: I have a simple motion cont |
| 2017-12-24 07:02:23 -0500 | edited question | Motion planning for industrial robots Motion planning for industrial robots The bottom line: What I'm looking for, is a motion planning tool that is more sui |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}