The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-03-19 08:08:20 -0500 | received badge | ● Taxonomist |
| 2020-02-05 10:51:09 -0500 | received badge | ● Self-Learner (source) |
| 2020-02-01 09:46:32 -0500 | received badge | ● Famous Question (source) |
| 2019-04-15 12:09:38 -0500 | received badge | ● Good Question (source) |
| 2018-08-23 14:52:46 -0500 | received badge | ● Notable Question (source) |
| 2018-08-23 14:52:46 -0500 | received badge | ● Popular Question (source) |
| 2018-05-28 11:02:18 -0500 | received badge | ● Nice Question (source) |
| 2017-10-30 11:57:34 -0500 | received badge | ● Famous Question (source) |
| 2017-10-30 11:57:34 -0500 | received badge | ● Notable Question (source) |
| 2017-10-16 10:29:17 -0500 | received badge | ● Notable Question (source) |
| 2017-07-09 04:07:14 -0500 | received badge | ● Popular Question (source) |
| 2017-03-24 11:07:03 -0500 | received badge | ● Nice Answer (source) |
| 2017-03-24 10:36:07 -0500 | received badge | ● Student (source) |
| 2017-03-20 04:20:54 -0500 | received badge | ● Teacher (source) |
| 2017-03-19 04:25:20 -0500 | asked a question | Weird compile error using ROS and Gazebo libraries Hi guys, Came across the weirdest compile error:
What the hell is going on ? Im linking Thanks |
| 2017-03-16 09:51:23 -0500 | asked a question | Deserialize ros messages in RosJava Hi guys, Im implementing a neat stuff in my android for my robotic soccer team. I receive (by multicast) packets that contain serialized ros messages. I've already "compiled" the messages in java, using genjava and i have a rosjava_messages/ fully loaded with all the ROS messages in my system. I'm a C++ guy, so, how can i compile an android project (android studio) against the jar's containing the messages ? i followed the tutorials but i get a lot of errors. I've already compiled against other libraries on the same project, so i know how to do it, but compiling against ROS stuff is a lot more complicated. Any help here ?? Thanks |
| 2017-03-12 08:35:27 -0500 | commented answer | Problems with communication between multiple machines @gvdhoorn it can be somehow useful to have the NAT on the Robot's PC because it will allow me to SSH into the Raspberry to, perhaps, update its software with the online connection provided by the masquerade ! |
| 2017-03-12 08:32:49 -0500 | answered a question | Connect two networks with one roscore I had the same problem. Fixed it really easily ! Just check out my question : #q256070 |
| 2017-03-12 08:31:11 -0500 | answered a question | Problems with communication between multiple machines @gvdhoorn i managed to do it. I kept those Ip tables commands i did and i just added to My PC : sudo route add -net 172.17.1.0 netmask 255.255.0.0 gw 172.16.49.1 I'm grateful for your help, this case is closed ! [Summing up for future visitors of this question] On ROS_MASTER PC, set IP forwarding between eth0 and wlan0, being wlan0 the output interface (like if we wanted to share internet over ethernet connected devices). This step is enough for Raspberry to reach any IP in the WLAN. On host PC (My PC in this case) just add a route to the Raspberry, having the Robot's PC as the gateway. |
| 2017-03-12 07:38:45 -0500 | commented answer | Problems with communication between multiple machines |
| 2017-03-12 06:59:52 -0500 | commented answer | Problems with communication between multiple machines @gvdhoorn i've read that before ! I will try some options to setup the routing process and hope for the best ! Do you have any experience in doing that ? |
| 2017-03-12 06:58:51 -0500 | received badge | ● Scholar (source) |
| 2017-03-12 06:58:47 -0500 | received badge | ● Supporter (source) |
| 2017-03-12 06:35:36 -0500 | received badge | ● Famous Question (source) |
| 2017-03-12 06:33:32 -0500 | received badge | ● Famous Question (source) |
| 2017-03-12 06:06:19 -0500 | commented question | Problems with communication between multiple machines |
| 2017-03-11 19:06:01 -0500 | received badge | ● Notable Question (source) |
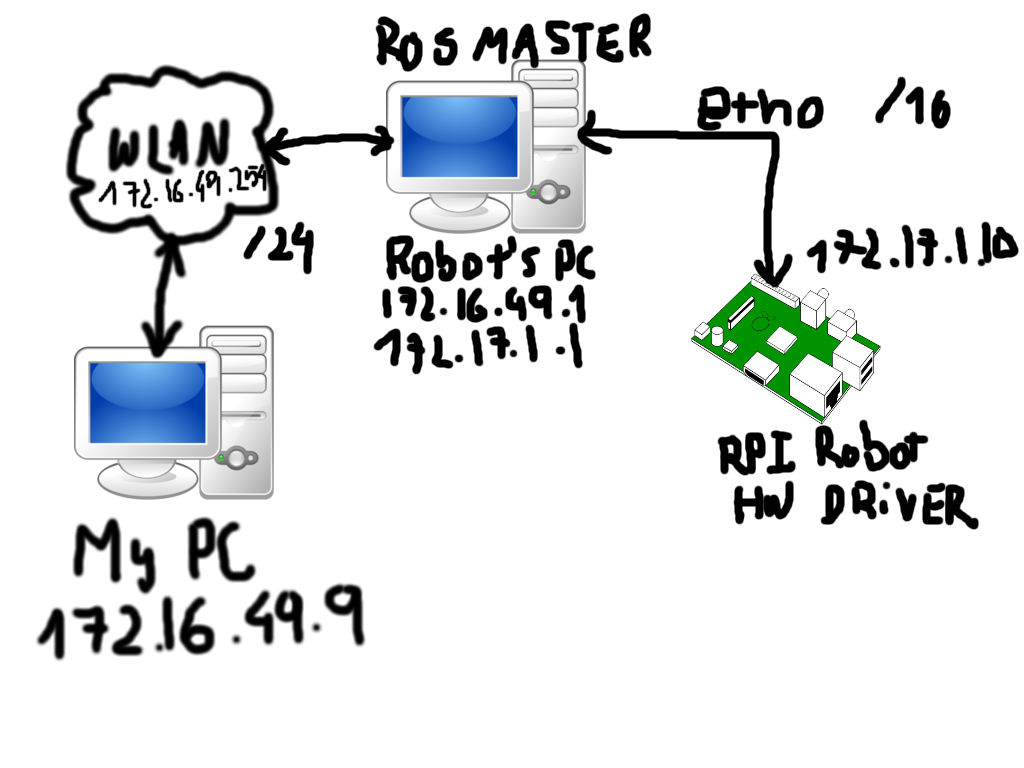
| 2017-03-11 18:26:03 -0500 | edited question | Problems with communication between multiple machines So, i have this setup in my ros network: My PC (172.16.49.9) as a publisher of the topic /controlInfo Pi is connected to Robot's PC through ethernet on the 172.17.x.x network. In both Pi and Robot's PC i can list all the nodes, see that /controlInfo is subscribed by 172.17.1.10 and published by 172.16.49.9, and whenever i publish data, i can echo-it in Robot's PC (so, the data reaches the master), but i can't echo-it in Pi. What's the problem here ? Since i can successfuly communicate between the Robot's PC and the Pi, i can list and everything seems to be correctly setup, why u no work ??? --- EDIT I made a new test on the machines, as my PC is providing the WLAN for the robot's PC. So, my pc has now ip 172.16.49.254, Robot's PC and Raspberry remains the same. My PC communicates with Robot's PC through WLAN and the raspberry is connected to Robot's PC by ethernet. I made a call to rosnode info (node in raspberry) from the Robot's PC and everything is ok. I made the same command from my PC and, although i can get a lot of info (which stuff it subscribes/publishes) it gives me an error : (pi_hw node is inside raspberry pi, and Robot's PC is the ROS_MASTER, all ROS_IP's are correctly set). It seems i can fetch information about the node (because it may be stored somewhere in Robot's PC) but i cant communicate with Raspberry because my PC can't reach her. I can successfully communicate from my PC to Robot's PC and from Robot's PC to Raspberry. --- EDIT Network scheme. It seems My PC and Raspberry need to communicate directly in order for this to work, so i will probably need ip routing.
WLAN : 172.16.49.0/24 Robot's PC Ethernet : 172.17.0.0/16 I truly believe that the only problem here is that Rasp cannot reach directly My PC, so they dont communicate, and it is a normal thing (that they cant reach each other) but i thought ... (more) |
| 2017-03-11 18:26:03 -0500 | received badge | ● Editor (source) |
| 2017-03-04 10:44:24 -0500 | commented question | Problems with communication between multiple machines Yep, it is .10 sorry |
| 2017-03-04 03:46:54 -0500 | commented question | Problems with communication between multiple machines Hi, in my pc ROS_IP is set to 172.16.49.9, in Pis is set to 172.17.1.0 and in Robot's PC to 172.16.49.1 (ethernet ip is 172.17.1.1). Will check on that data on monday and get back gere |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.