
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-11-09 18:50:45 -0500 | received badge | ● Teacher (source) |
| 2021-11-08 05:49:31 -0500 | marked best answer | Delay in JointStates Hi My yaml files and launch files are attached : I tried changing the rate of jpint values publisher, but no use. Any idea what I am missing ?? |
| 2021-08-29 08:02:34 -0500 | received badge | ● Good Question (source) |
| 2021-03-05 01:51:49 -0500 | received badge | ● Famous Question (source) |
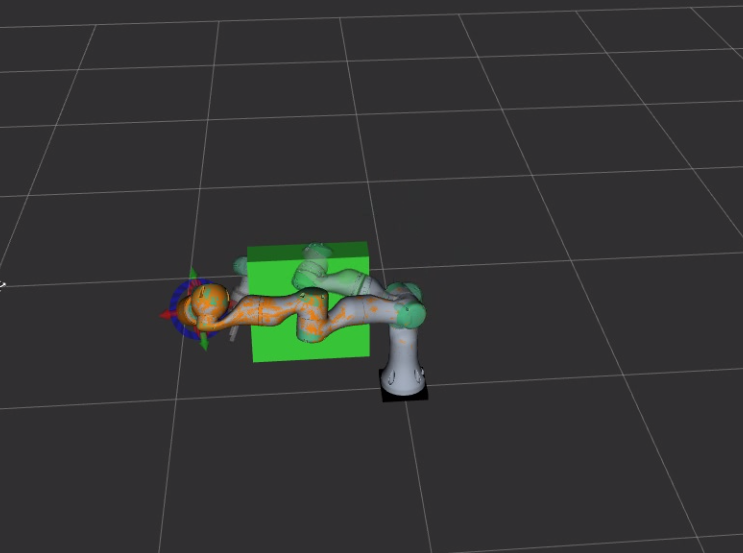
| 2020-12-18 13:21:40 -0500 | marked best answer | Collision checking failed Hi I am using ROS Kinetic with Ubuntu 16.04. I tried the moveit tutorials given here with my own 7 dof manipulator. After getting the collision object in the environment, I tried some random pose planning through Rviz gui and in one of the plans the robot is shown colliding with the collision object. I am posting the pic hereCan someone tell me why it is happening ?? |
| 2020-12-10 00:26:27 -0500 | received badge | ● Notable Question (source) |
| 2020-01-12 05:45:12 -0500 | received badge | ● Famous Question (source) |
| 2020-01-12 05:45:06 -0500 | received badge | ● Famous Question (source) |
| 2019-08-12 05:10:23 -0500 | commented question | Merge trajectories in real time Hi, is there any kind of update regarding this?? I am also trying to implement the same thing |
| 2019-08-06 11:00:09 -0500 | received badge | ● Famous Question (source) |
| 2019-07-11 02:01:48 -0500 | received badge | ● Notable Question (source) |
| 2019-07-10 01:16:40 -0500 | commented answer | Collision checking failed you can check here |
| 2019-07-10 00:23:04 -0500 | received badge | ● Famous Question (source) |
| 2019-07-09 06:31:22 -0500 | commented answer | Collision checking failed I tried it, but still robot does collide with the object and this time I deliberately made it to collide with the collis |
| 2019-07-08 23:54:56 -0500 | received badge | ● Popular Question (source) |
| 2019-07-08 23:54:28 -0500 | answered a question | ROS Kinetic 'catkin_make' fails because PROJECT_NAME is set to Project Try changing 'Project' to some another name and can you please show the CMakeLists.txt file for your project |
| 2019-07-08 23:54:28 -0500 | received badge | ● Rapid Responder (source) |
| 2019-07-01 23:48:36 -0500 | edited question | Collision checking failed Collision checking failed Hi I am using ROS Kinetic with Ubuntu 16.04. I tried the moveit tutorials given here with my |
| 2019-07-01 00:07:25 -0500 | asked a question | Collision checking failed Collision checking failed Hi I am using ROS Kinetic with Ubuntu 16.04. I tried the moveit tutorials given here with my |
| 2019-06-14 13:23:55 -0500 | received badge | ● Famous Question (source) |
| 2019-05-20 01:16:37 -0500 | marked best answer | Problem fetching the ros_controller state from controller/state topic I am using ROS-Indigo on Ubunu 14.04. While using MoveIt! with ros-controllers I wanted to capture the data published on coro/coro_arm_controller/state topic. However while the acceleration and effort fields, segmentation fault error is coming. Below is my code. Can anyone suggest me on what to do next ?? After many iterations I found that there is some problem while capturing the acceleration and effort value of the joints. |
| 2019-05-15 00:27:38 -0500 | received badge | ● Popular Question (source) |
| 2019-05-14 03:18:17 -0500 | received badge | ● Famous Question (source) |
| 2019-05-06 04:14:42 -0500 | asked a question | Significance of jerk limits Significance of jerk limits Hi I am working with Ubuntu 16.04 and ROS Kinetic. I am doing motion planning for my 7 dof |
| 2019-03-02 06:01:22 -0500 | received badge | ● Notable Question (source) |
| 2019-02-06 03:07:59 -0500 | received badge | ● Famous Question (source) |
| 2019-02-03 03:55:03 -0500 | received badge | ● Famous Question (source) |
| 2019-01-28 01:02:16 -0500 | commented question | RViz Crashing (Ogre or MoveIt!) Any updates on this one please ?? |
| 2019-01-16 22:20:23 -0500 | received badge | ● Notable Question (source) |
| 2019-01-16 03:40:08 -0500 | commented question | Different urdf models in rviz You can show two different robots in the same RViz map. However you have to create a single URDF file and define two rob |
| 2019-01-14 04:47:42 -0500 | received badge | ● Popular Question (source) |
| 2019-01-14 02:44:17 -0500 | commented question | RViz Crashing (Ogre or MoveIt!) Yes I can run it stand alone |
| 2019-01-14 00:29:19 -0500 | received badge | ● Notable Question (source) |
| 2019-01-13 22:50:18 -0500 | asked a question | RViz Crashing (Ogre or MoveIt!) RViz Crashing (Ogre or MoveIt!) Hi I am using ROS-kinetic on Ubunutu 16.04. I tried to build MoveIt! by source installa |
| 2019-01-06 09:58:42 -0500 | received badge | ● Notable Question (source) |
| 2019-01-06 09:58:42 -0500 | received badge | ● Famous Question (source) |
| 2019-01-03 03:48:51 -0500 | received badge | ● Nice Question (source) |
| 2019-01-02 23:33:04 -0500 | commented question | How many points in a trajectory is reasonable you can refer to the below link: https://answers.ros.org/question/310819/inreasing-waypoints-in-moveit/ |
| 2019-01-02 23:27:33 -0500 | commented question | Inreasing waypoints in MoveIt! Thanks, I varied the longest_valid_segment_fraction and due to that i am able to increase the way-points in MoveIt!. I a |
| 2019-01-02 23:27:33 -0500 | received badge | ● Commentator |
| 2019-01-02 23:24:17 -0500 | answered a question | I have a problem with Define Robot Poses (in Moveit Setup Assistant) Can you check your joint limits in URDF and make sure the soft_upper_limit and soft_lower_limit have small values as com |
| 2019-01-01 03:52:37 -0500 | received badge | ● Notable Question (source) |
| 2018-12-31 16:04:42 -0500 | received badge | ● Popular Question (source) |
| 2018-12-31 03:32:43 -0500 | commented answer | Specifying maximum payload for a manipulator Thanks for the answer |
| 2018-12-30 22:49:09 -0500 | asked a question | Specifying maximum payload for a manipulator Specifying maximum payload for a manipulator Hi I m using ROS Kinetic with Ubuntu 16.04. I have a 7-dof manipulator eq |
| 2018-12-27 23:23:27 -0500 | received badge | ● Notable Question (source) |
| 2018-12-17 21:58:49 -0500 | commented question | Adding snap(derivative of jerk) in trajectory I want to achieve smoothness at jerk level. hence it need to provide snap limits. I want to know whether snap limits are |
| 2018-12-17 21:52:32 -0500 | received badge | ● Good Question (source) |
| 2018-12-17 21:52:26 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}