
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-08-08 01:19:43 -0500 | marked best answer | Sending multiple goals to Navigation Stack I am writing a program for autonomous navigation of a Husky. I combining imu, wheel encoders and visual odometry for navigation. All the sensors have been successfully integrated and a target goal can be sent to the robot. Here is my question: How can I send the robot multiple goals so that it will visit each goal and do not stop at each one? Right now, I am using the ac.waitForResult() function, (based on the "Sending Goals to the Navigation Stack" tutorial). The robot will stop at each goal and then move to the next one. I want the robot to move smoothly.
|
| 2017-12-04 04:31:12 -0500 | received badge | ● Famous Question (source) |
| 2017-05-26 16:17:43 -0500 | received badge | ● Famous Question (source) |
| 2017-05-24 10:47:20 -0500 | received badge | ● Favorite Question (source) |
| 2017-05-16 13:21:51 -0500 | received badge | ● Notable Question (source) |
| 2017-05-16 11:45:30 -0500 | answered a question | Sending multiple goals to Navigation Stack
|
| 2017-05-16 11:41:10 -0500 | commented answer | Sending multiple goals to Navigation Stack Actually, I don't need the robot to reach each goal. I was trying to issue a new goal prior to the current one completin |
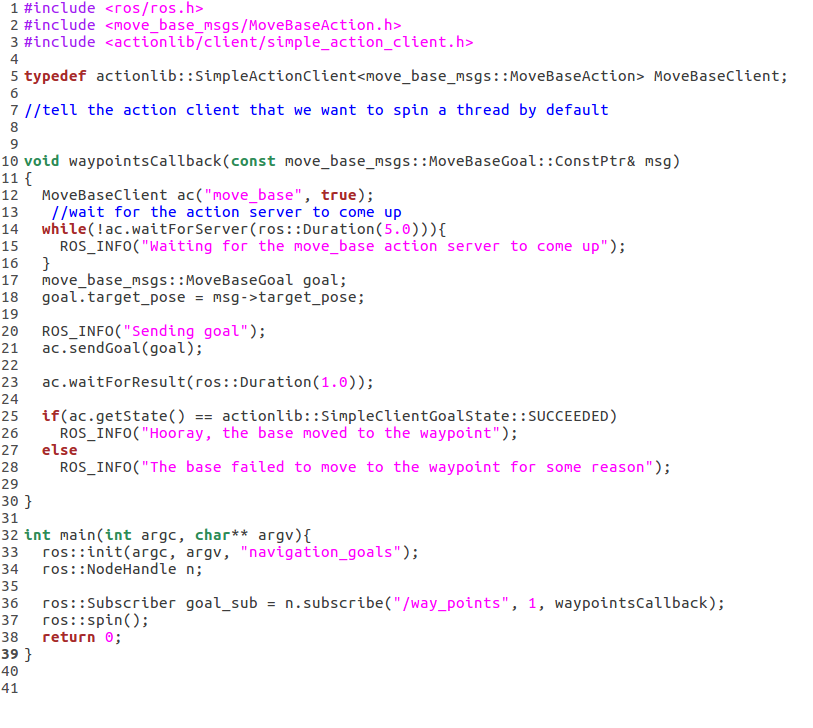
| 2017-05-16 11:39:01 -0500 | answered a question | Sending multiple goals to Navigation Stack #include <ros/ros.h> include <move_base_msgs movebaseaction.h=""> include <actionlib client="" simple_ |
| 2017-05-16 11:36:23 -0500 | commented answer | Sending multiple goals to Navigation Stack Actually, I don't need the robot to reach each goal. I was trying to issue a new goal prior to the current one completin |
| 2017-05-16 11:34:12 -0500 | commented answer | Sending multiple goals to Navigation Stack Actually, I don't need the robot to reach each goal. I was trying to issue a new goal prior to the current one completin |
| 2017-05-16 11:27:44 -0500 | received badge | ● Popular Question (source) |
| 2017-05-15 13:16:47 -0500 | asked a question | Sending multiple goals to Navigation Stack Sending multiple goals to Navigation Stack I am writing a program for autonomous navigation of a Husky. I combining imu, |
| 2017-02-13 22:35:32 -0500 | commented question | mapviz: local WMTS for tile_map plugin problems Awesome! It's what I am looking for. I was able to get the the OSM work, but had hard time find satellite tiles. Your solution solved my problem! Thanks! |
| 2017-01-26 03:23:38 -0500 | received badge | ● Famous Question (source) |
| 2017-01-10 08:49:58 -0500 | received badge | ● Famous Question (source) |
| 2017-01-04 14:00:09 -0500 | received badge | ● Notable Question (source) |
| 2016-11-29 02:44:31 -0500 | received badge | ● Popular Question (source) |
| 2016-11-29 02:44:31 -0500 | received badge | ● Notable Question (source) |
| 2016-11-28 05:04:21 -0500 | received badge | ● Notable Question (source) |
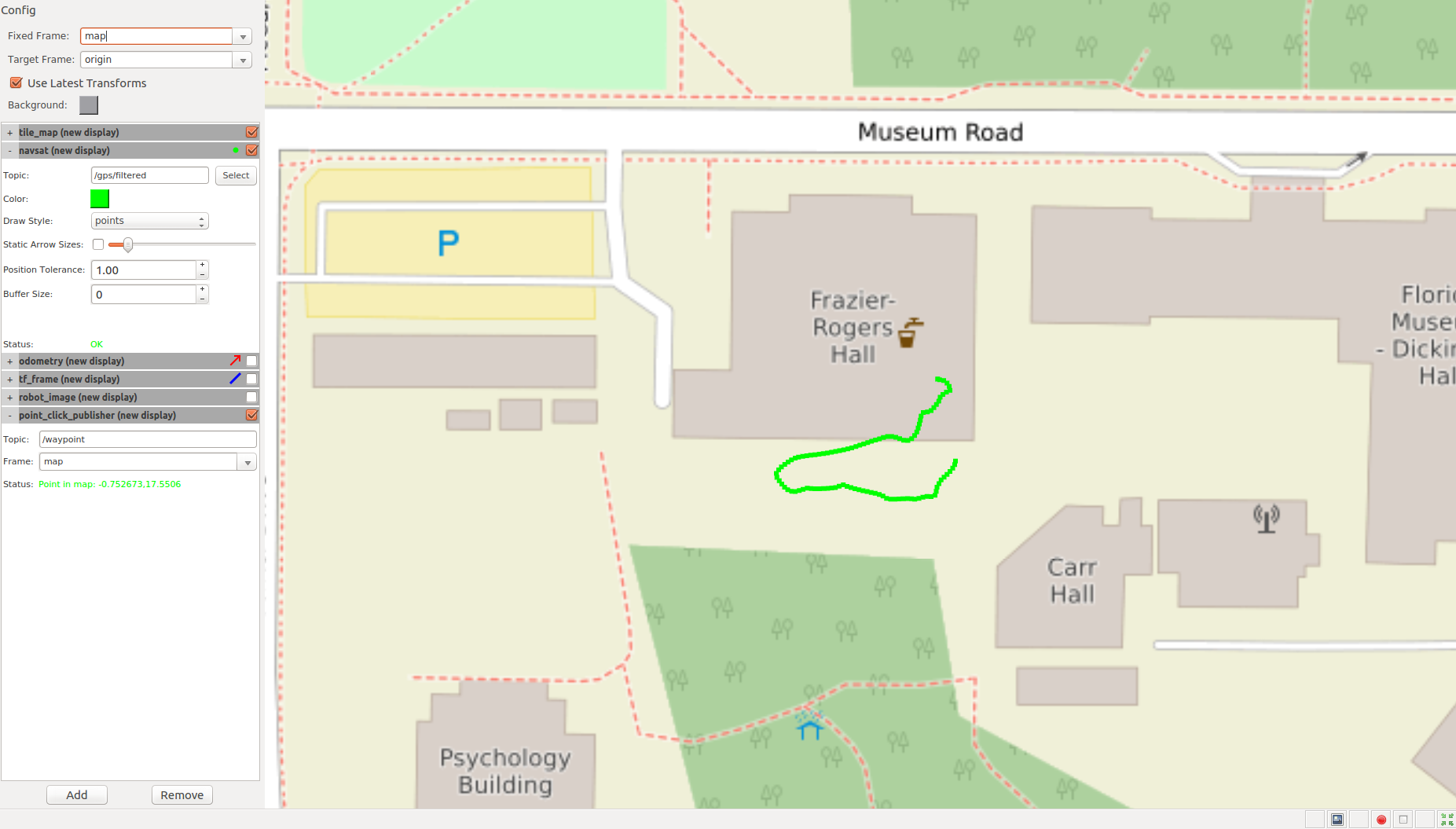
| 2016-11-14 13:48:40 -0500 | asked a question | robot_localization: how to set covariance matrix I am using robot_localization to integrate odometer, IMU and GPS data on a Clearpath Husky robot. 2 ekf_localization_node were used to create map->odom->baselink frame transformations. Everything works fine except one problem: The error of filtered GPS data was accumulating. The positioning error can quickly reach more than 10 meters after several miniutes, which is even a lot bigger than the GPS error itself. It doesn't make sense to me. So I am suspecting that it might be the problem of initial covariance matrix of measurement. I did not set up the covariance matrix, so I am guessing the ekf_localization_node was using a default matrix. How can I correctly set up the covariance matrix? (say the GPS std is 3 meters). Below is the path of my robot, the figure shows the filtered GPS data. The robot started from thr right bottom connor of the building and returned to the same location. However, the filtered GPS data showed the robot in a very wrong positon (in the building)
|
| 2016-10-24 08:27:07 -0500 | received badge | ● Popular Question (source) |
| 2016-10-04 13:02:23 -0500 | received badge | ● Enthusiast |
| 2016-10-03 22:12:28 -0500 | received badge | ● Editor (source) |
| 2016-10-03 22:00:39 -0500 | asked a question | robot_localization: EKF and navsat_transform problems The objective: To navigate a Clearpath Husky robot in the outdoor environment with imu, odometry and GPS. What I am doing now is to use a launch file that starts two EKF instances and one navsat_transform instance. The launch file is here: https://drive.google.com/file/d/0B_j5... I pretty much used a launch file that I found from another related post provided by Tom. The problems I have are:
Another beginners' questions, where should i put the launch file? I just put the launch file any package (Husky_control for example) and launch the file with 'roslaunch Husky_control robot_localization.launch'. My understanding is it doesn't matter where the launch file is located, right? Please help. I started to learn ROS a month ago, so I have a lot of confusion. Thanks, |
| 2016-09-30 19:23:30 -0500 | received badge | ● Popular Question (source) |
| 2016-09-30 14:59:15 -0500 | answered a question | mapviz: local WMTS for tile_map plugin problems Update: It's now working. I restarted the computer and also restarted the mapviz several times, and suddenly, it worked. I still don't know what was the problem before. But anyway, it works now. So now, if anyone wants to build a local map sever for the tile_map of mapviz, under Ubuntu 16.04, just follow the instruction in the link: https://www.linuxbabe.com/linux-serve... After done with that, you can put the Base URL: http://your_server_ip/osm_tiles/{leve... Set the Max Zoom to 18 and save it. |
| 2016-09-29 20:24:34 -0500 | received badge | ● Student (source) |
| 2016-09-29 18:12:11 -0500 | asked a question | mapviz: local WMTS for tile_map plugin problems I am trying to build a local tile map server for the tile_map plugin, so I can navigate and show my husky robot in the map at where no internet is available. I followed the link here to build a tile map server: https://www.linuxbabe.com/linux-serve... I was able to see my map in a browser when typing 'http://my-server-ipt' after following the instructions in the link above. I was also able to see the tile of a world map in the browser when typing 'http://localhost/osm_tiles/0/0/0.png'. Everything described in the above link works! The problem is, when I launch the mapviz.launch, select 'tile_map' plugin and choose 'Custom WMTS Source', in the Base URL, type 'http://localhost/osm_tiles/{level}/{x}/{y}.png', nothing shows. I tried change the first part of Base URL into http://localhost , http://127.0.0.1/osm_tiles and so on, none of them works. I am thinking maybe I need to do some additional steps after following the above link? I am new to the map server thing, please help! Actually, if anyone knows how to build a local WMTS for mapviz and give some instructions will be great! Thanks, Hao |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}