The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-07-02 01:56:28 -0500 | marked best answer | MultiLibraryClassLoader Error Hello everyone, I'm writing a rviz panel. When I change namespace (tiffer_panel -> Tiffer) in my code, and change the PLUGINLIB_EXPORT_CLASS. After Compiled, when I run It seems not change. But when I change the namespace back (Tiffer -> tiffer_panel), it works well again... Can someone tell me what's wrong with this? |
| 2021-07-02 01:56:28 -0500 | received badge | ● Self-Learner (source) |
| 2020-12-31 02:42:53 -0500 | marked best answer | Can I reconfigure robot speed when navigation? Hello everyone, now I have a task about navigation. I want my robot to have different speeds in different environments. Just like this:
|
| 2020-12-17 12:06:12 -0500 | marked best answer | Build package with system_lib not found Hello everyone, My Environment Is: I run this package under ROS-Indigo before, how can i fix this? |
| 2020-05-20 17:36:12 -0500 | received badge | ● Nice Answer (source) |
| 2020-05-17 15:53:47 -0500 | received badge | ● Self-Learner (source) |
| 2020-04-15 14:32:12 -0500 | marked best answer | undefined symbol when loading custom rviz panel Hello everyone, I have some question when i write a panel for Rviz, when i add a extra .h file for my project. After CATKIN_MAKE with no Error, when i add it in Rviz, it show me this : But I had add it in cpp, I use Kinetic under Ubuntu 16.04. When I remove this .h file from my project, my panel works well again. Can someone tell my what's wrong with it? Here is my .h file: |
| 2019-03-19 13:35:09 -0500 | received badge | ● Famous Question (source) |
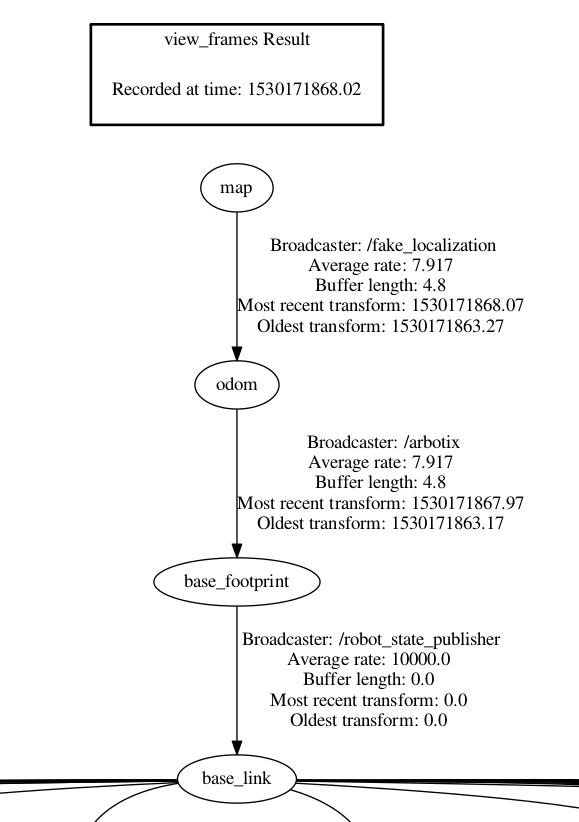
| 2019-01-11 12:49:49 -0500 | marked best answer | TF2 lookupTransform problem in Qt5 When I was writing a Qt5 widget use tf2, I got all zero when print Translation and Rotation. I reviewed some similar questions and modified my program, it was written inside the UI's constructor, just like this: And in testTf2(), I print ts. I had set the With I also run
I want to know if my method is wrong, or the parameters set are wrong? |
| 2019-01-11 12:47:25 -0500 | received badge | ● Famous Question (source) |
| 2019-01-11 12:47:25 -0500 | received badge | ● Notable Question (source) |
| 2018-11-21 23:11:29 -0500 | received badge | ● Famous Question (source) |
| 2018-10-25 14:00:36 -0500 | received badge | ● Famous Question (source) |
| 2018-10-03 07:36:51 -0500 | received badge | ● Famous Question (source) |
| 2018-09-25 09:34:52 -0500 | received badge | ● Notable Question (source) |
| 2018-09-04 08:08:29 -0500 | received badge | ● Famous Question (source) |
| 2018-08-22 11:05:39 -0500 | received badge | ● Popular Question (source) |
| 2018-08-22 11:05:39 -0500 | received badge | ● Notable Question (source) |
| 2018-08-06 06:08:20 -0500 | received badge | ● Necromancer (source) |
| 2018-08-06 06:08:20 -0500 | received badge | ● Teacher (source) |
| 2018-06-30 06:28:56 -0500 | commented answer | TF2 lookupTransform problem in Qt5 lookupTransform("map", "base_link", ros::Time::now(), ros::Duration(1)); It delay for 0.15s, how can I deal with it? L |
| 2018-06-30 06:28:13 -0500 | commented answer | TF2 lookupTransform problem in Qt5 lookupTransform("map", "base_link", ros::Time::now(), ros::Duration(1)); It delay for 0.15s, how can I deal with it? ` |
| 2018-06-30 06:27:59 -0500 | commented answer | TF2 lookupTransform problem in Qt5 lookupTransform("map", "base_link", ros::Time::now(), ros::Duration(1)); It delay for 0.15s, how can I deal with it? ` |
| 2018-06-30 06:25:42 -0500 | commented answer | TF2 lookupTransform problem in Qt5 it delay for 0.15s, how can I deal with it? [ WARN] [1530356857.871087341]: Lookup would require extrapolation into the |
| 2018-06-30 06:25:35 -0500 | commented answer | TF2 lookupTransform problem in Qt5 it delay for 0.15s, how can I deal with it? [ WARN] [1530356857.871087341]: Lookup would require extrapolation into the |
| 2018-06-30 06:25:13 -0500 | commented answer | TF2 lookupTransform problem in Qt5 it delay for 0.15s, how can I deal with it? |
| 2018-06-30 06:24:26 -0500 | commented answer | TF2 lookupTransform problem in Qt5 it delay for 0.15s, how can I deal with it? |
| 2018-06-30 04:55:14 -0500 | commented answer | TF2 lookupTransform problem in Qt5 Thank you for your detailed explanation. In fact if I change the Duration parameter in canTransform,it throw out a time |
| 2018-06-30 04:19:24 -0500 | received badge | ● Popular Question (source) |
| 2018-06-29 08:17:15 -0500 | received badge | ● Notable Question (source) |
| 2018-06-28 04:10:23 -0500 | answered a question | GUI creation through rqt Hello Vincenz, I suggest you use connect, with SIGNAL and SLOT. here is a part of my code. In constructor : QPushButt |
| 2018-06-28 03:36:27 -0500 | received badge | ● Notable Question (source) |
| 2018-06-28 03:36:27 -0500 | received badge | ● Famous Question (source) |
| 2018-06-28 03:34:11 -0500 | asked a question | TF2 lookupTransform problem in Qt5 TF2 lookupTransform problem in Qt5 When I was writing a Qt5 widget use tf2, I got all zero when print Translation and Ro |
| 2018-06-27 21:47:30 -0500 | commented answer | data.data does not name a type I think you may put this in your .h file, try put them at ,cpp file and compile again. |
| 2018-06-26 22:31:28 -0500 | received badge | ● Popular Question (source) |
| 2018-06-26 09:52:59 -0500 | commented answer | Tf to tf2 upgrade adaptation problem Thank you for your detailed explanation, it really wake me up. |
| 2018-06-26 09:49:31 -0500 | marked best answer | Tf to tf2 upgrade adaptation problem Hello everyone, I wanna update tf to tf2 in my code, but get some question about it. There are
When I follow the doc to update to tf2, I get some wrong. There are tf2 part: I Don't know how to transfrom data under tf2, and I didn‘t find the relevant function in doc. I want to know how to modify my code to achieve the same result? Is there a function just like |
| 2018-06-26 04:09:54 -0500 | asked a question | Tf to tf2 upgrade adaptation problem Tf to tf2 upgrade adaptation problem Hello everyone, I wanna update tf to tf2 in my code, but get some question about |
| 2018-06-23 12:06:46 -0500 | received badge | ● Notable Question (source) |
| 2018-06-11 00:01:00 -0500 | received badge | ● Famous Question (source) |
| 2018-06-10 21:51:12 -0500 | commented question | How to create our own global planner There is Github Project which achieved a global planner, you can refer this. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.