The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-08-20 12:47:54 -0500 | received badge | ● Notable Question (source) |
| 2021-08-20 12:47:54 -0500 | received badge | ● Popular Question (source) |
| 2021-08-20 12:47:54 -0500 | received badge | ● Famous Question (source) |
| 2020-03-09 10:47:25 -0500 | received badge | ● Famous Question (source) |
| 2019-11-05 08:33:49 -0500 | marked best answer | the necessary of the "rosparam set use_sim_time true " in gmapping hello, I would like to know the necessary of "rosparam set use_sim_time true " when I build exact map by using gmapping and rviz. When I used "rosparam set use_sim_time true " before "rosrun gmapping slam_gmapping scan:=base_scan", my map becomes error " No map received" in rviz. If I don't use "rosparam set use_sim_time true " ,The error don't appear. If I don't use ""rosparam set use_sim_time true " , Can I build exact map? |
| 2019-08-27 18:38:01 -0500 | received badge | ● Famous Question (source) |
| 2019-08-14 03:34:24 -0500 | received badge | ● Famous Question (source) |
| 2019-05-20 01:39:02 -0500 | marked best answer | the necessity of yaw angle limitation Hello , currently,I worked on cording the odometry_tf node. I have something to ask about limitation of yaw angle. According to the following URL, the yaw angle of robot(th) is not limited . http://wiki.ros.org/navigation/Tutori... In this case,I think that the "th" is gradually increasing and the value of odom_quat will be nan. Is this allright? |
| 2019-03-05 14:50:03 -0500 | marked best answer | I can't execute roslanch of remote PC from host PC Hello, I'd like to execute simple roslaunch file(test1.launch) of remote PC from host PC.Then I encountered the following error.please let me know how to resolve the problem. I configured something as the following procedure.
Then I encountered above error. test1.launch file is following. My "/home/mori/catkin_ws/devel/env.sh" is the following. I checked the following contents. |
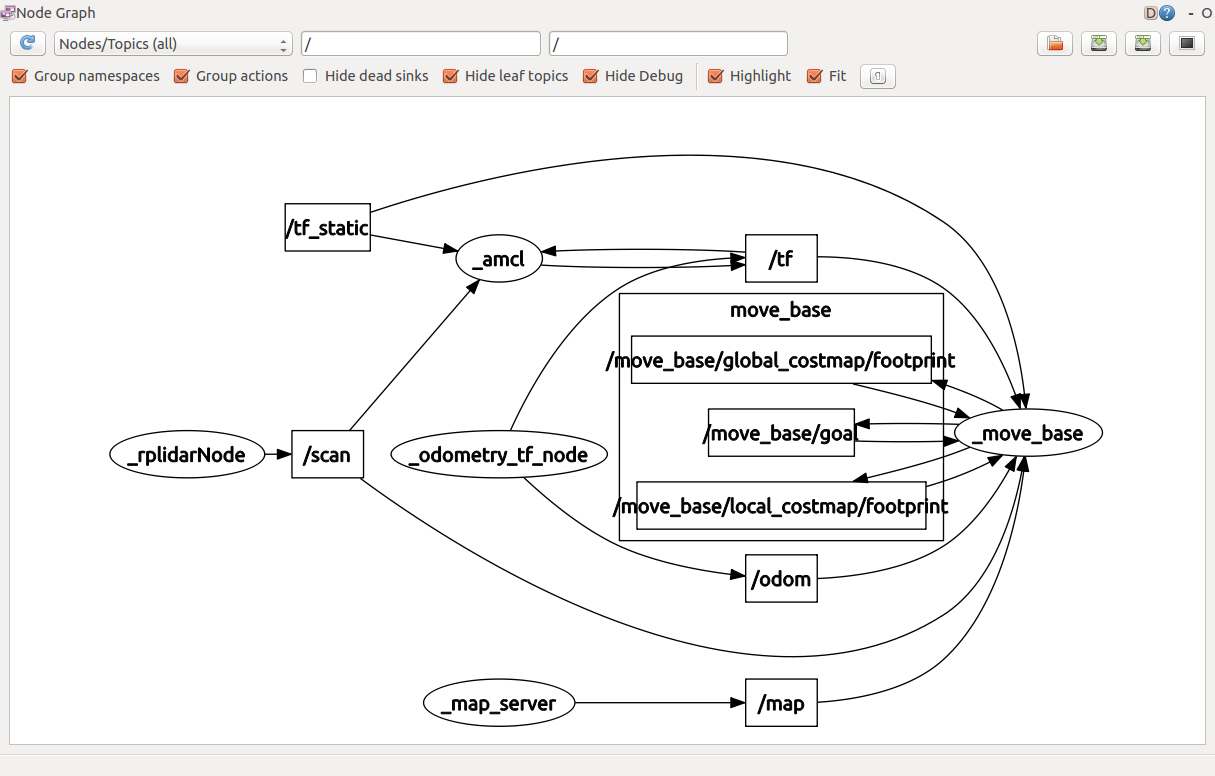
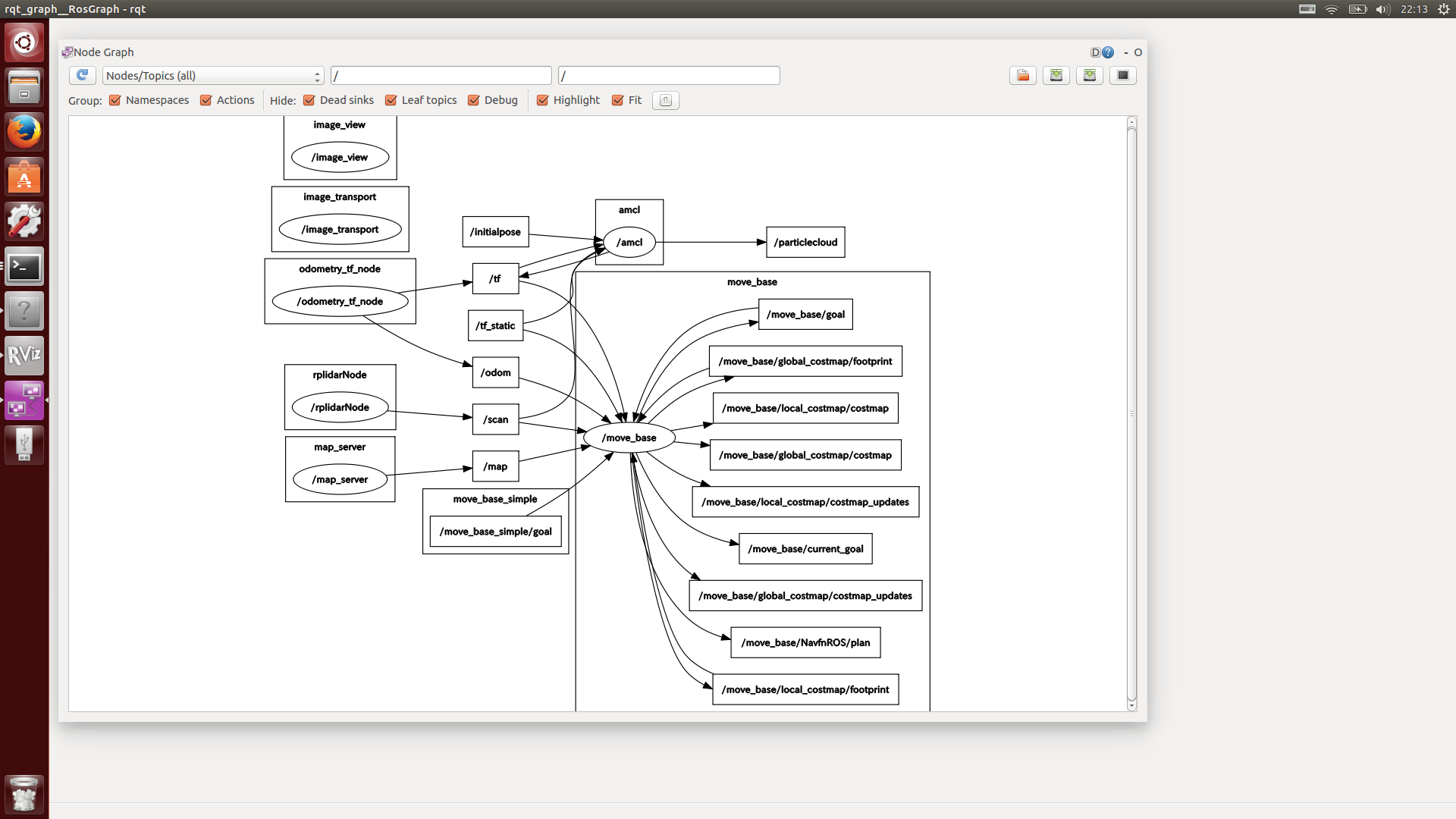
| 2019-03-05 14:48:35 -0500 | marked best answer | I can't use rviz in host PC My purpose is executing navigation to my handmade robot. I have 2 PCs. I'd like to see the rviz and set the goal position from host PC remotely. And I 'd like to control remote PC on the robot to execute amcl.launch. I have already executed amcl.launch remotely on the remote PC, but I couldn't see the map of rviz from host PC. I thought that it looks like rviz didn't get the information of remote PC. Therefore,I executed "rqt_graph"on my host PC, then I could see some nodes. From this result , I found that my host PC and remote PC are capable of communicating each other. Please let me know how to see the rviz from my host PC? Edit: I configured commands as the following procedure.
Then, The diagram is appeared the following. And I can't see the tf(I also checked it by executing "rosrun tf view_frames").
If I execute roscore and the step [3] only on the remote PC . I can get the following diagram. And I can see tf tree and rviz.
My launch file "amcl.launch" is the following: |
| 2019-03-01 12:43:18 -0500 | marked best answer | CatkinMake Error in DS325 "depth camera" Hello , I try to use DS325 depth camera. To get the following URL' s node, I executed the command "git clone https://github.com/Myzhar/ros_depthse... . https://github.com/Myzhar/ros_depthse... Finally , I executed "CatkinMake",but I encountered the following error. Error message : My development environment is Ubuntu14.04 and Indigo. How should I resolve the error? Please help me. |
| 2019-02-18 12:44:21 -0500 | received badge | ● Famous Question (source) |
| 2018-09-18 19:55:35 -0500 | marked best answer | misaligned map by using gmapping
I'm trying to making map by using gmapping. But my map is misaligned. Could you let me know the solution if you have ever experienced like me ? I use my original robot and using only odometry. so , It is a little different from the angle value that is calculated and real value. Thank you |
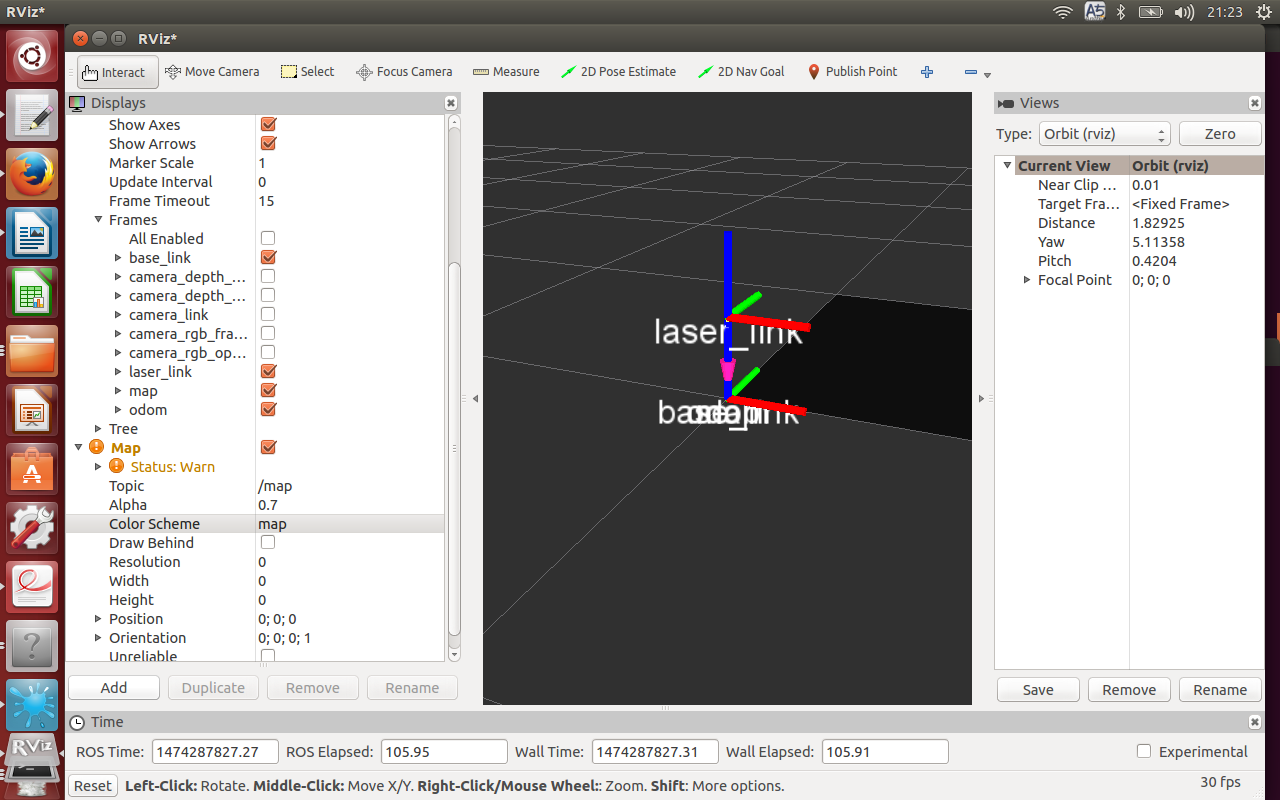
| 2018-09-18 19:54:29 -0500 | marked best answer | How to build map using rviz Hello, I could not build map using rviz. The map error message is " No map received". My tf is odom →base_link →laser_link →camera_link I uses raspberrypi 2 and build my robot by using it. the node is the following
Probably the above stated node don't have problem because I could build a map before without using rviz.
Please let me know how to solve the problem.
Thank you.
|
| 2018-07-19 13:00:18 -0500 | received badge | ● Student (source) |
| 2018-07-19 13:00:14 -0500 | received badge | ● Self-Learner (source) |
| 2018-07-19 13:00:14 -0500 | received badge | ● Teacher (source) |
| 2018-06-12 21:24:15 -0500 | edited question | Uncontrallable urdf of 2 link arm in Gazebo Uncontrallable urdf of 2 link arm in Gazebo Hello, I'd like to make a 2 link arm model by using urdf to simulate it in G |
| 2018-06-12 21:16:24 -0500 | asked a question | Uncontrallable urdf of 2 link arm in Gazebo Uncontrallable urdf of 2 link arm in Gazebo Hello, I'd like to make a 2 link arm model by using urdf to simulate it in G |
| 2018-05-17 06:22:05 -0500 | commented question | 'sm_13' is not defined for option 'gpu-architecture' Thank you for your advice, I posted my issue to the URL that you posted for me. |
| 2018-05-17 06:20:33 -0500 | received badge | ● Notable Question (source) |
| 2018-05-16 01:17:35 -0500 | received badge | ● Popular Question (source) |
| 2018-05-15 20:38:08 -0500 | marked best answer | Error in executing usbcam_node by using raspberrypi2 (indigo) Hello, I 'd like to use usbcam_node in raspberrypi2.I have already installed indigo . And I installed somethings and execute some commands as following procedures. (1)$ ls /dev/video* ->/dev/video0 is displayed. (2)$ sudo apt-get update (3)$ sudo apt-get install ros-indigo-usb-cam (4)$ roscore (5)$ rosparam set usb_cam/pixel_format yuyv (6)$ rosrun usb_cam usb_cam_node (7)$ rostopic list ->/rosout /rosout_agg /usb_cam/camera_info / usb_cam/image_raw (8)$ rosrun image_view image_view image:=/usb_cam/image_raw Then the window is appeared but the screen is gray and the error is appeared.
Could you let me know how to resolve the problem? |
| 2018-05-15 20:36:55 -0500 | received badge | ● Notable Question (source) |
| 2018-05-15 17:24:47 -0500 | commented question | 'sm_13' is not defined for option 'gpu-architecture' I used Lenovo ideapaad Y700 NVIDIA Geforce 960M and installed version of cuda is the following. nvcc -V nvcc: NVIDIA (R |
| 2018-05-15 17:20:37 -0500 | asked a question | 'sm_13' is not defined for option 'gpu-architecture' 'sm_13' is not defined for option 'gpu-architecture' Hello, I installed darknet_ros and executed catkin_make. Then I enc |
| 2018-04-14 00:13:39 -0500 | received badge | ● Famous Question (source) |
| 2018-03-23 19:23:16 -0500 | received badge | ● Notable Question (source) |
| 2018-03-10 08:05:47 -0500 | received badge | ● Famous Question (source) |
| 2018-02-27 14:05:48 -0500 | received badge | ● Famous Question (source) |
| 2018-02-23 17:12:34 -0500 | commented answer | the necessity of yaw angle limitation I took your opinion as reference and I comment out the limitation of yaw angle, then my robot is capable of making map w |
| 2018-02-23 17:11:38 -0500 | commented answer | the necessity of yaw angle limitation Thank your for your helpful advice! Actually, I encountered the issue that my navigation robot is not capable of makin |
| 2018-02-23 17:11:16 -0500 | commented answer | the necessity of yaw angle limitation I took your opinion as reference and I comment out the limitation, then my robot is capable of making map well. |
| 2018-02-23 17:09:58 -0500 | commented answer | the necessity of yaw angle limitation Thank your for your reply! Actually, I encountered the issue that my navigation robot is not capable of making map due |
| 2018-02-22 07:31:15 -0500 | received badge | ● Popular Question (source) |
| 2018-02-21 07:36:08 -0500 | edited question | the necessity of yaw angle limitation the necessity of yaw angle limitation Hello , currently,I worked on cording the odometry_tf node. I have something to a |
| 2018-02-21 07:34:37 -0500 | edited question | the necessity of yaw angle limitation the necessity of yaw angle limitation Hello , currently,I worked on cording the odometry_tf node. I have something to a |
| 2018-02-21 07:33:15 -0500 | asked a question | the necessity of yaw angle limitation the necessity of yaw angle limitation Hello , currently,I worked on cording the odometry_tf node. I have something to a |
| 2018-02-16 18:31:23 -0500 | commented question | I can't use rviz in host PC I have not resolved it yet. Thank you for your advice, I will try it. |
| 2018-02-16 18:31:10 -0500 | commented question | I can't use rviz in host PC I have not resolved it yet. Thank you for your advice, I will tray it. |
| 2018-01-31 22:50:41 -0500 | received badge | ● Famous Question (source) |
| 2018-01-31 16:03:33 -0500 | commented answer | I can't use rviz in host PC Thank you for your reply. But I think that it is not problem of the network. when I executed amcl.launch on remote PC, |
| 2018-01-31 15:57:34 -0500 | received badge | ● Famous Question (source) |
| 2018-01-31 07:56:40 -0500 | commented question | I can't use rviz in host PC Yes,I have already set "ROS_IP" on each PC. |
| 2018-01-31 07:30:03 -0500 | answered a question | I can't use rviz in host PC I configured commands as the following procedure. [1] setting of IP Address and name on Host(NotePC) I executed "s |
| 2018-01-31 06:10:04 -0500 | received badge | ● Famous Question (source) |
| 2018-01-31 01:13:37 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.