The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-07-20 20:12:07 -0500 | received badge | ● Good Question (source) |
| 2023-02-08 09:14:33 -0500 | received badge | ● Nice Question (source) |
| 2023-01-17 14:29:42 -0500 | received badge | ● Nice Question (source) |
| 2022-08-08 03:38:52 -0500 | received badge | ● Good Question (source) |
| 2022-07-10 23:13:20 -0500 | received badge | ● Famous Question (source) |
| 2022-07-10 23:13:20 -0500 | received badge | ● Notable Question (source) |
| 2022-05-04 12:48:46 -0500 | marked best answer | ROS Logging Display Node Name Hi, I'm very sorry if this is a repeat question, but I'm using robot_upstart which dumps all logging output into the single file /var/log/upstart/foo.log. This makes it really hard to tell which node is talking. I'm currently getting the generic error "Failed to open port" and I'm not sure how to figure out where this message is coming from. Is there a way to get ROS logging to display to node name? |
| 2022-02-08 22:51:10 -0500 | received badge | ● Famous Question (source) |
| 2022-01-16 11:48:07 -0500 | answered a question | How to start ROS2 node automatically after starting the system? The ROS2 Launch system is explained here https://design.ros2.org/articles/roslaunch.html |
| 2021-08-26 20:31:48 -0500 | received badge | ● Nice Question (source) |
| 2021-01-21 03:58:07 -0500 | received badge | ● Famous Question (source) |
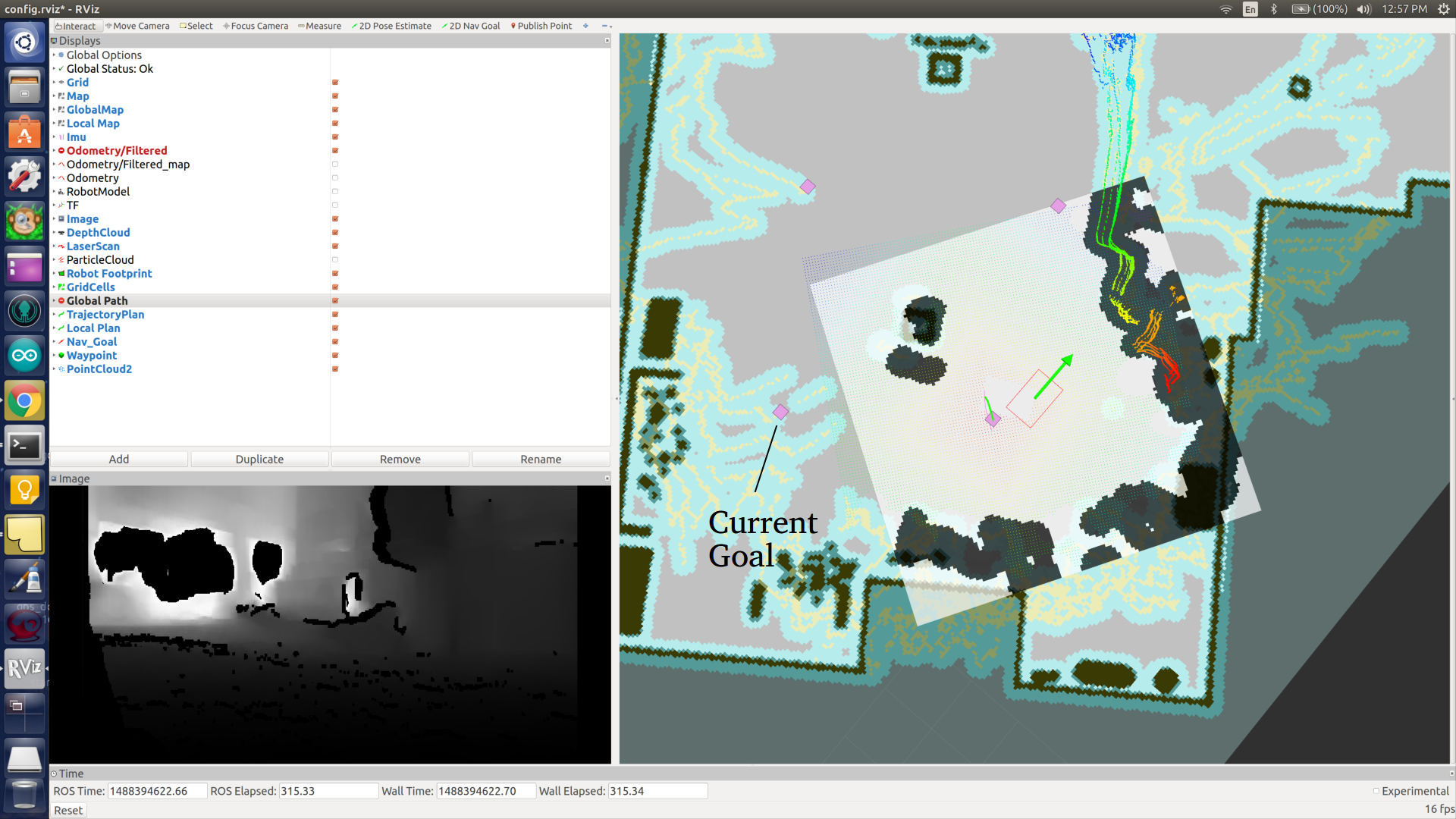
| 2020-11-16 08:24:21 -0500 | marked best answer | Static global map updating Hi, Also in RVIZ the global map sometimes doesn't update until I toggle it off and back on again. Here is my global_costmap_params.yaml And here is the part of my launch files that loads move_base Also is there a way to verify that my .yaml file is being loaded? Update: Which returned: true Update 2 I am running move_base with the default recovery behavior which includes clear_costmap_recovery, so I'm confused at why this recovery isn't working Here is a picture of a situation where my robot failed to find a valid plan
Update 3 Here are my config files: base_local_planner_params.yaml |
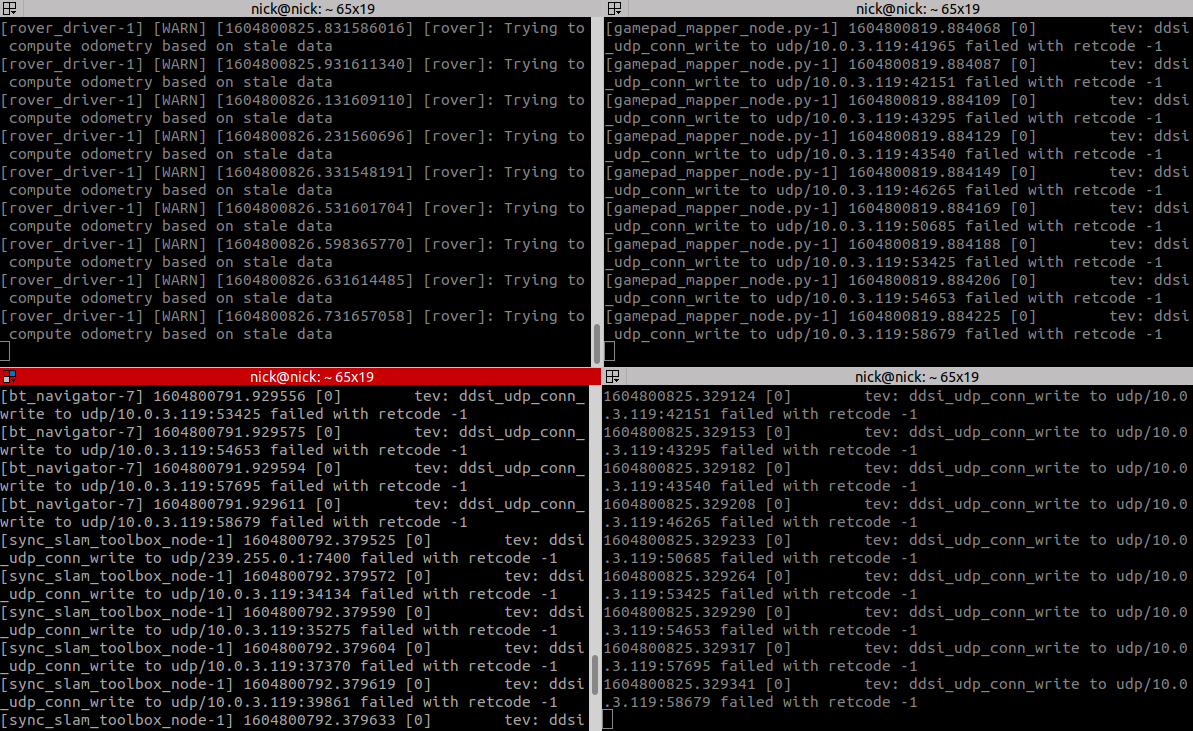
| 2020-11-13 21:54:30 -0500 | marked best answer | USING ros2 offline (ROS_LOCALHOST_ONLY=1) Hi, I'm trying to do a demo of mapping a large building with ROS2 Foxy, Slam Toolbox and a Rover Pro. I'm starting inside an office connected to wifi and then moving down a hallway where I lose wifi connection. If I have ROS_LOCALHOST_ONLY=0 then I have several nodes crash with error message tev: ddsi_udp_conn_write to udp/10.0.3.119:58679 failed with retcode: -1
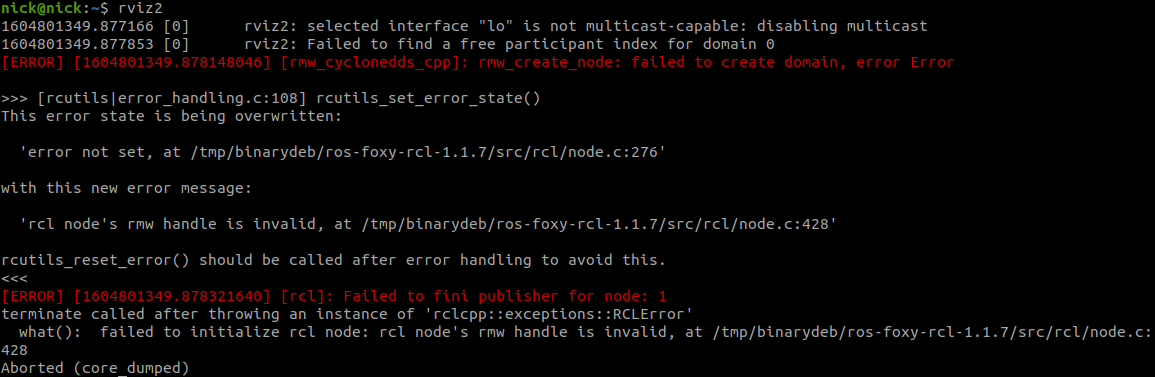
I then set ROS_LOCALHOST_ONLY=1 and am able to drive outside of wifi coverage but RVIZ2 fails to open with the error failed to find a free participant index for domain 0 so I am not able to see the map I'm creating.
Here is my ROS2 doctor --report (more) |
| 2020-11-11 03:13:32 -0500 | received badge | ● Notable Question (source) |
| 2020-11-10 15:30:35 -0500 | commented answer | USING ros2 offline (ROS_LOCALHOST_ONLY=1) How do I tell ROS2 to use a certain interface? In ROS1 there was the variable ROS_IP and ROS_MASTER_URI, but from lookin |
| 2020-11-08 21:44:23 -0500 | received badge | ● Popular Question (source) |
| 2020-11-07 20:31:20 -0500 | asked a question | USING ros2 offline (ROS_LOCALHOST_ONLY=1) USING ros2 offline (ROS_LOCALHOST_ONLY=1) Hi, I'm trying to do a demo of mapping a large building with ROS2 Foxy, Slam |
| 2020-06-14 04:30:09 -0500 | received badge | ● Notable Question (source) |
| 2020-06-14 04:30:09 -0500 | received badge | ● Famous Question (source) |
| 2019-12-25 00:57:16 -0500 | received badge | ● Necromancer (source) |
| 2019-08-27 14:30:40 -0500 | marked best answer | Wheel Odometry Covariance Hi, I am using robot_localization. I'm using the typical setup EKF1 fuses encoders + IMU My question is about encoder covariances. The robot_localization documentation says
Following this advice I am fusing the orientation that the wheel encoders report, but I don't know what to set the encoders pose covariance to. Logically I would think the pose covariance should grow every time you move. It would just keep growing and growing without bound. But when I look at the example pose covariance diagonals of the diff_drive_contoller package it says to use static values I'm very confused because diff_drive_controller seems like a commonly used package but those covariances don't make sense to me. |
| 2019-08-09 17:06:50 -0500 | marked best answer | Extracting compressed image data from bag file results in doubled up or dropped frames Hi, I'm trying to extract compressed images from a bag file. Here is my launch file: This results in some frames not being saved and some frames being saves multiple times. Also a lot of frames are saved out of order so the video I make out of the frames is really choppy. |
| 2019-05-20 02:20:09 -0500 | marked best answer | Waypoint specific yaw_goal_tolerance for move base Is there any way to specify a yaw_goal_tolerance for each waypoint you send to move_base? Sometimes I care which direction it ends up in and other times I don't care. And using dynamic reconfigure sounds overly complicated and would result in much less readable code and would be harder to debug. |
| 2019-05-20 01:23:00 -0500 | received badge | ● Notable Question (source) |
| 2019-05-20 01:23:00 -0500 | received badge | ● Famous Question (source) |
| 2019-03-28 04:39:33 -0500 | received badge | ● Famous Question (source) |
| 2019-03-28 04:39:33 -0500 | received badge | ● Notable Question (source) |
| 2019-03-14 01:10:05 -0500 | received badge | ● Popular Question (source) |
| 2019-03-08 15:31:08 -0500 | asked a question | AMCL Time-based updating AMCL Time-based updating Hi, I am using an Rover Robotics OpenRover to run AMCL on a robot and I see that AMCL updates |
| 2019-02-13 10:28:54 -0500 | received badge | ● Famous Question (source) |
| 2019-02-08 09:52:48 -0500 | received badge | ● Notable Question (source) |
| 2019-02-07 19:55:51 -0500 | received badge | ● Popular Question (source) |
| 2019-02-07 16:56:02 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
| 2019-02-07 16:54:21 -0500 | commented answer | ROS2 Debugging Techniques Ah okay. I have tried to update my CMakesLists.txt and package.xml but am still getting an error. I have updated my ques |
| 2019-02-07 16:42:12 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
| 2019-02-07 16:41:11 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
| 2019-02-07 16:40:30 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
| 2019-02-07 16:40:06 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
| 2019-02-07 16:36:32 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
| 2019-02-07 16:36:00 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
| 2019-02-07 16:35:12 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
| 2019-02-07 16:33:56 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
| 2019-02-07 16:32:55 -0500 | edited question | ROS2 Debugging Techniques ROS2 Debugging Techniques I'm just getting started learning ROS2 and I'm going through the tutorials. I am trying to cre |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.