The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-09-13 15:33:59 -0500 | received badge | ● Nice Answer (source) |
| 2017-02-10 15:38:40 -0500 | received badge | ● Self-Learner (source) |
| 2017-02-10 15:38:40 -0500 | received badge | ● Teacher (source) |
| 2016-11-02 15:46:00 -0500 | received badge | ● Famous Question (source) |
| 2016-08-13 16:57:37 -0500 | received badge | ● Enthusiast |
| 2016-08-12 07:55:38 -0500 | received badge | ● Notable Question (source) |
| 2016-08-02 16:13:19 -0500 | received badge | ● Popular Question (source) |
| 2016-08-02 15:50:37 -0500 | answered a question | can't make a map with gmapping Hi, Ok, I installed chrony and followed the number 5 of this link and it's working. Thank you again for your time, Adèle |
| 2016-08-02 13:15:50 -0500 | commented answer | can't make a map with gmapping THANK YOU ! I will try that :) |
| 2016-08-02 12:16:31 -0500 | commented answer | can't make a map with gmapping 0158075.948213777, when looking up transform from frame [laser] to frame [odom]] Is that mean that my tf doesnt work ? |
| 2016-08-02 12:10:54 -0500 | commented answer | can't make a map with gmapping If I put the fixed frame on odom, LaserScan get a status error and i get : Transform [sender=unknown_publisher] For frame [laser]: No transform to fixed frame [odom]. TF error: [Lookup would require extrapolation into the future. Requested time 1470157838.730087730 but the latest data is at time 147 |
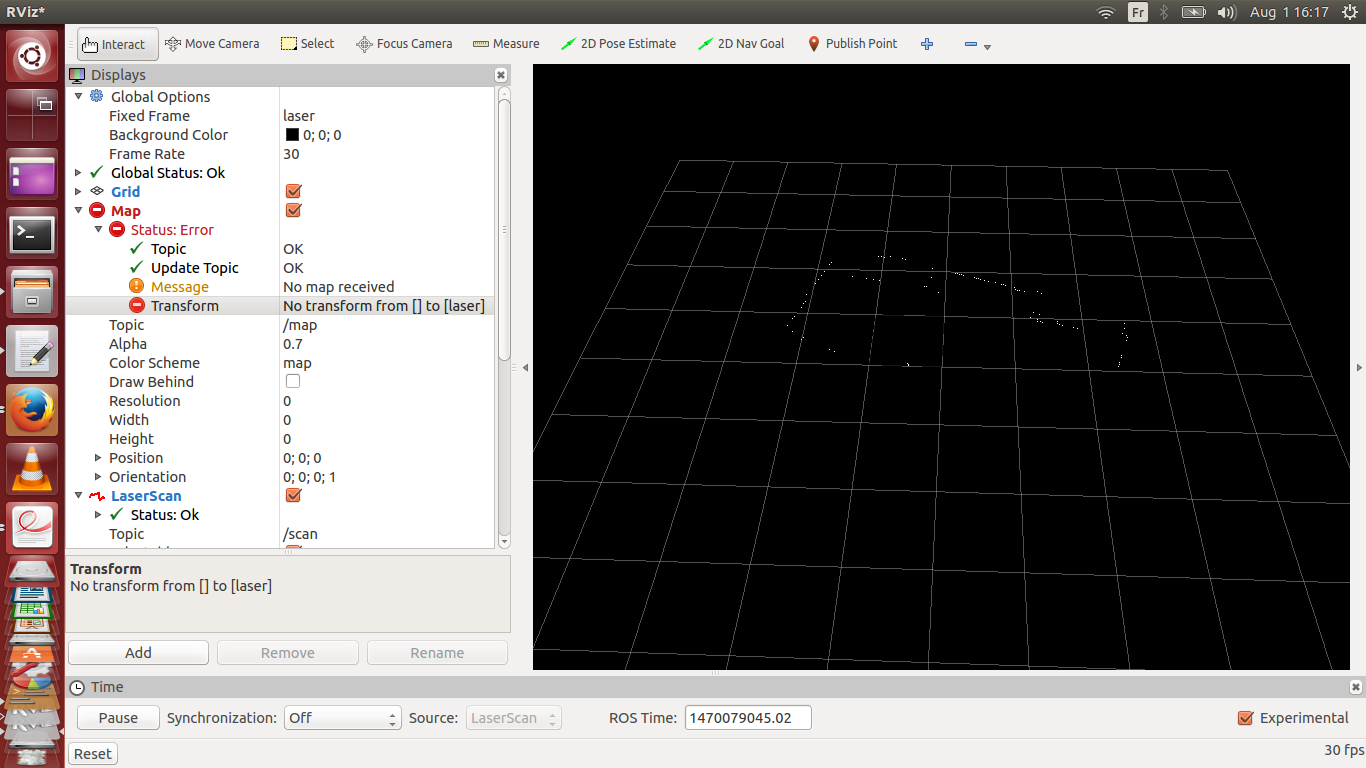
| 2016-08-02 12:06:28 -0500 | commented answer | can't make a map with gmapping Hi, thank you for answering, I put some screenshot and I think you are right because if I change the fixed frame to odom, I can't see anything on RVIZ. How can I fix this ? thanks, Adèle |
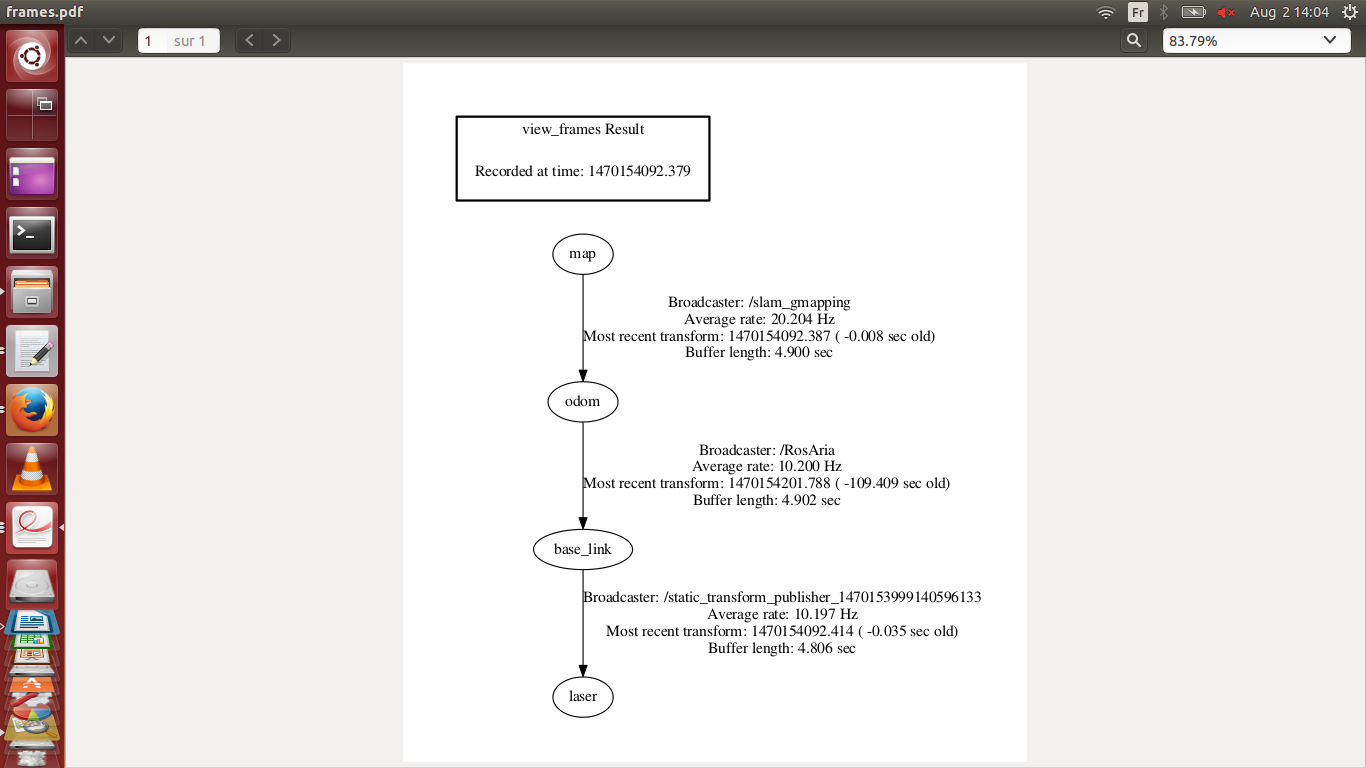
| 2016-08-02 11:28:59 -0500 | asked a question | can't make a map with gmapping hi guys, I am currently working on a Pioneer 3 with ROS. I would like to create a map with gmapping but I keep getting errors, maybe someone already did it and can help me ? I tried with and without .bag file but the result is the same, when I tape "rosrun map_server map_saver" I get an "[ INFO] [1470077431.447071488]: Waiting for the map ". here is what i do: $ roscore $ rosrun tf static_transform_publisher 0 0 0 0 0 0 base_link laser 100 $ rosrun rviz rviz $ rosrun gmapping slam_gmapping scan:=scan _xmin:=0 _ymin:=0 _xmax:=10 _ymax:=10 _delta:=0.04 $ roslaunch joyCommand robot_joy.launch $ sudo chmod a+rw /dev/ttyS0 $ rosrun rosaria RosAria _port:=/dev/ttyS0 $ sudo chmod a+rw /dev/ttyS2 $ sudo setserial /dev/ttyS2 irq 10 $ rosrun sicktoolbox_wrapper sicklms _port:=/dev/ttyS2 _baud:=38400 _resolution:=0.5 _connect_delay:=40 Then I walk the robot aound. I can see the laser on RVIZ but the status of the map is error and I get "No transform from [] to [laser]" which I don't understand. In gmapping I get the warning : "[ WARN] [1470065513.054899811]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information. If I launch the debug (rqt_logger_level) I get : [DEBUG] [1470154442.550934882]: MessageFilter [target=odom ]: Removed oldest message because buffer is full, count now 5 (frame_id=laser, stamp=1470154551.427095) Also "rostopic echo map" or rostopic echo map_metadata" never give anything. Finally my frames ( rosrun tf view_frames ) give me map -> odom -> base_link -> laser here is some screenshot
If anyone can help me that would be great ! Thank you for your time, Adèle |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.