The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-07-21 08:05:35 -0500 | received badge | ● Taxonomist |
| 2021-03-24 11:15:37 -0500 | answered a question | Can I reset RVIZ via topic? rosservice call /rviz_node/load_config "path: data: '/path/to/rviz/config.rviz'" reloads RViz |
| 2019-05-20 02:22:28 -0500 | marked best answer | [Poll] What notebook would you recommend for ROS development Hi! What notebook would you recommend for ROS development? Would MacBook Pro work good? I work with ROS a lot in my projects. I also often need Gazebo, so Parallels on Mac would not efficiently, and I need either install ROS on MacOS or use Ubuntu on MBP. Does ROS and Gazebo work same at MacOS as under Ubuntu currently? Do you have experience using Ubuntu with ROS on MBP or what are your other recommendations? Thanks! Update: So there are 2 Alienware recommendations and I am not sure about MBP. Anybody use it? Because Alienware seems to be not very compact. Maybe we could make some poll "What notebook do you use for ROS" here. |
| 2018-02-28 20:26:19 -0500 | received badge | ● Famous Question (source) |
| 2017-08-29 17:53:07 -0500 | received badge | ● Famous Question (source) |
| 2017-08-29 10:04:35 -0500 | edited question | [Poll] What notebook would you recommend for ROS development What notebook would you recommend for ROS development Hi! What notebook would you recommend for ROS development? Would |
| 2017-08-29 10:04:08 -0500 | edited question | [Poll] What notebook would you recommend for ROS development What notebook would you recommend for ROS development Hi! What notebook would you recommend for ROS development? Would |
| 2017-08-29 04:00:44 -0500 | answered a question | [Poll] What notebook would you recommend for ROS development So there are 2 Alienware recommendations and I am not sure about MBP. Anybody use it? Because Alienware seems to be not |
| 2017-08-29 01:41:52 -0500 | received badge | ● Notable Question (source) |
| 2017-08-28 20:32:26 -0500 | received badge | ● Popular Question (source) |
| 2017-08-28 16:44:05 -0500 | marked best answer | How could I detect that ROS is installed in CMakeLists Hi! I need to make universal CMakeLists.txt, able to build package with ROS or not. So I need some conditional variable to detect, that package could be build with ROS: Thanks! |
| 2017-08-28 16:43:53 -0500 | received badge | ● Famous Question (source) |
| 2017-08-28 16:43:00 -0500 | asked a question | [Poll] What notebook would you recommend for ROS development What notebook would you recommend for ROS development Hi! What notebook would you recommend for ROS development? Would |
| 2017-08-04 09:18:59 -0500 | received badge | ● Notable Question (source) |
| 2017-07-28 12:04:27 -0500 | received badge | ● Popular Question (source) |
| 2017-07-27 22:23:07 -0500 | asked a question | How could I detect that ROS is installed in CMakeLists How could I detect that ROS is installed in CMakeLists Hi! I need to make universal CMakeLists.txt, able to build packa |
| 2017-06-27 21:19:44 -0500 | received badge | ● Notable Question (source) |
| 2017-05-20 12:46:29 -0500 | received badge | ● Popular Question (source) |
| 2017-05-19 19:37:40 -0500 | marked best answer | QtCreator works very slow with ROS on Ubuntu 16 (14 OK) Hi! Anybody has solution for this problem? When I moved to Ubuntu 16 and ROS Kinetic from 14 and Indigo, I couldn't use QtCreator because of long latencies of GUI, it is very slow, when using autocompletion, going to definitions, refactoring, copying and so on. This is common issue on two my computers and for my teammate. For Ubuntu 14 and ROS Indigo it worked perfect. Also it works OK for non-ROS projects. Thanks! |
| 2017-05-19 19:37:31 -0500 | commented answer | QtCreator works very slow with ROS on Ubuntu 16 (14 OK) Thank you! I am not alone) Installed 4.2.2 from website and done configuration according http://wiki.ros.org/IDEs#QtCr |
| 2017-05-19 16:54:44 -0500 | edited question | QtCreator works very slow with ROS on Ubuntu 16 (14 OK) QtCreator works very slow with ROS on Ubuntu 16 (14 OK) Hi! Anybody has solution for this problem? When I moved to Ubu |
| 2017-05-19 16:53:44 -0500 | asked a question | QtCreator works very slow with ROS on Ubuntu 16 (14 OK) QtCreator works very slow with ROS on Ubuntu 16 (14 OK) Hi! Anybody has solution for this problem? When I moved to Ubu |
| 2017-01-06 11:44:29 -0500 | received badge | ● Notable Question (source) |
| 2016-12-30 03:13:46 -0500 | received badge | ● Popular Question (source) |
| 2016-12-29 01:36:41 -0500 | asked a question | What is the best way to clear robot elements from costmap or laserScan data I have big robot with 360-degree LIDAR. LIDAR is set in a way, that some robot construction elements are on the LaserScan data. Thus they are at costmap. So robot become an obstacle for itself :-) I think, I should be common problem, but I don't know the simple way to address this. Should I substitute LaserScan values for certain angles, at witch it sees itself to inf? Or I must separate 1 360-degree scan to 4 separate scans, that eliminating the problem angles? Or I need in some way configure costmap? Actually, robot elements are inside footprint and must be cleared? |
| 2016-02-02 11:54:33 -0500 | marked best answer | How can I use Qt 5 with ROS catkin? I'm able to use qt_ros, but it creates package depending on Qt4, but I need Qt 5.1 or older to use QSerialPort. How can I do it? Is it a bad idea? |
| 2015-07-16 13:54:22 -0500 | received badge | ● Famous Question (source) |
| 2015-05-24 02:31:54 -0500 | marked best answer | Is it possible to get GPS data from AR.Drone with Flight Recorder in ardrone_autonomy? I'm using AR.Drone with Flight Recorder (witch enable geolocation using the GPS module). I installed ardrone_autonomy and very pleased with it. But there is no GPS data in topics published. However, using QGroundControl, I can connect to AR.Drone and get GPS data in GLOBAL_POSITION_INT packet, so I can get GPS data in my program with MAVLINK. The problem is that I can't use ardrone_autonomy and MAVLINK connection simultaniously. When I start ardrone_autonomy, I loose connection in QGroundControl (MAVLINK). So my question is about possibility of reading GPS data from AR.Drone with ardrone_autonomy or using ardrone_autonomy simultaniously with MAVLINK connection? |
| 2015-04-29 12:45:59 -0500 | received badge | ● Notable Question (source) |
| 2015-04-29 11:43:35 -0500 | received badge | ● Popular Question (source) |
| 2015-04-26 03:41:10 -0500 | answered a question | Rviz doesn't update rolling-window costmap origin I think, I solved this problem for myself. The issue was that Rviz doesn't correctly use /move_base/global_costmap/costmap_updates (of map_msgs/OccupancyGridUpdate type), so setting parameter |
| 2015-04-26 02:34:14 -0500 | received badge | ● Editor (source) |
| 2015-04-26 02:17:03 -0500 | commented question | Rviz doesn't update rolling-window costmap origin Ubuntu 14.04, ROS Indigo. http://wiki.ros.org/husky_navigation/... |
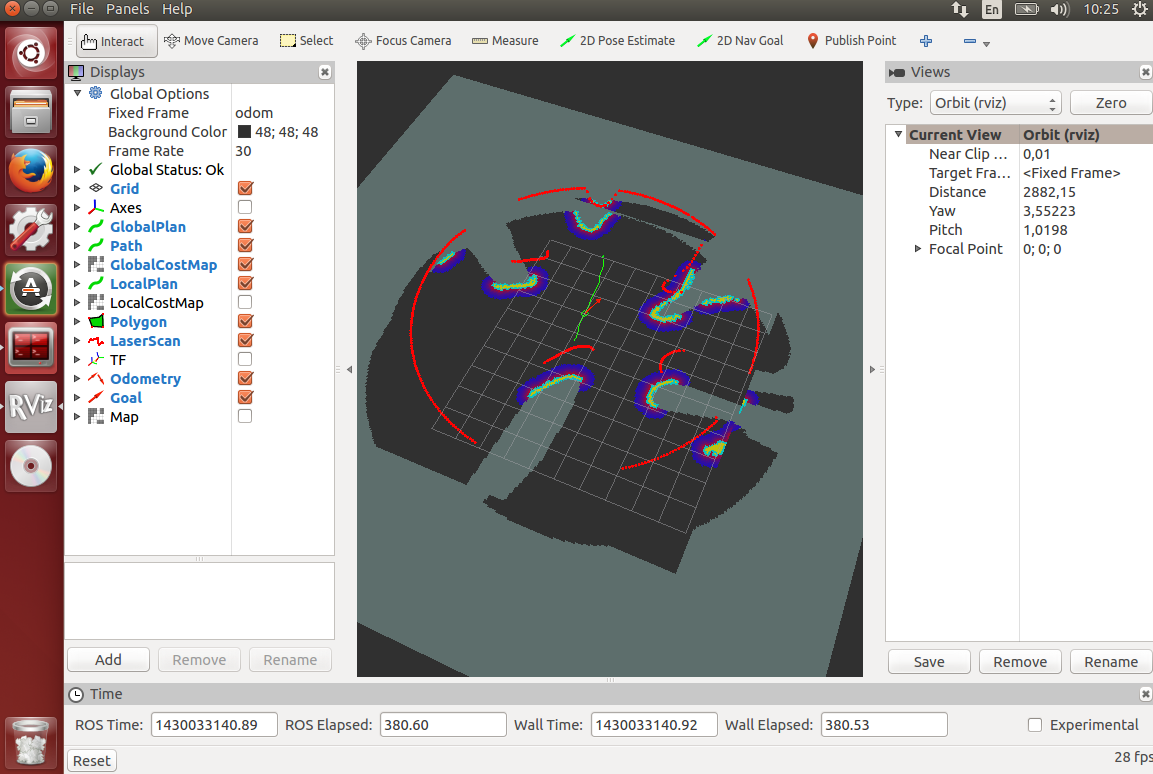
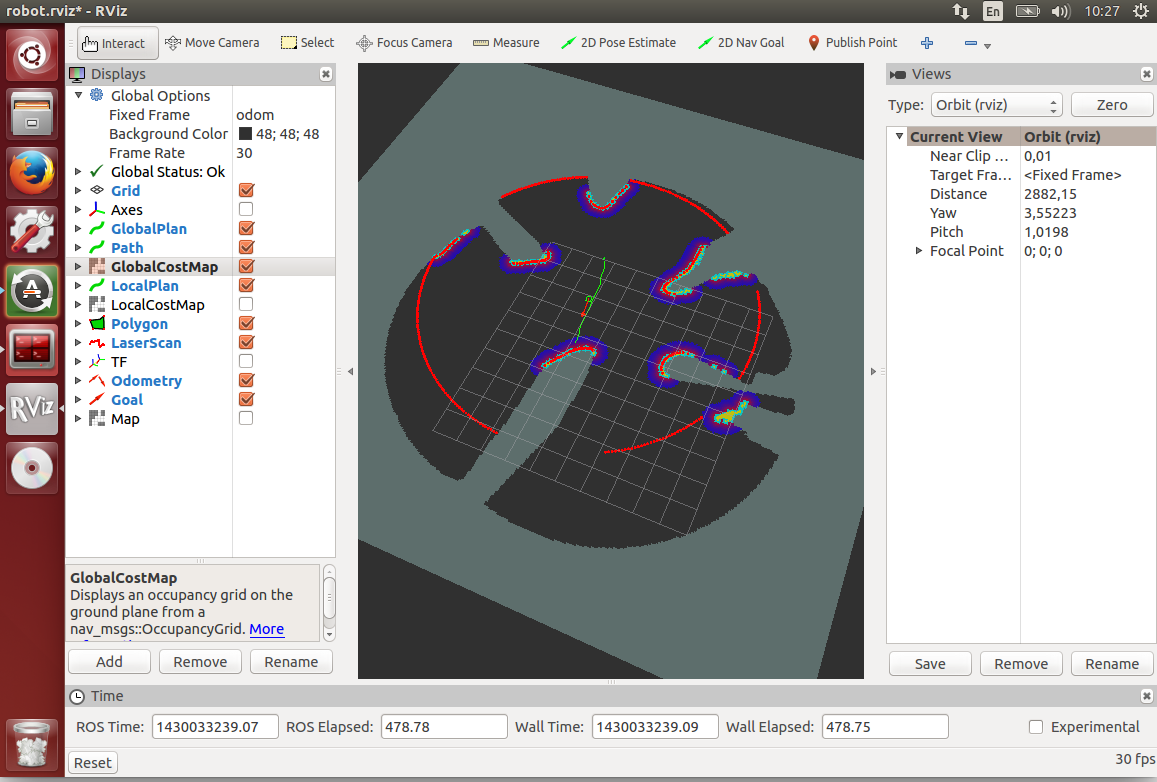
| 2015-04-24 02:44:59 -0500 | asked a question | Rviz doesn't update rolling-window costmap origin If I disable and then enable costmap view in rviz, it updates. But rviz itself doesn't translate cosmap update, it draws it with old origin. It even happens for husky_navigation example. How could I configure rviz to view rolling-window cosmap with moving origin right? Here are 2 screenshots - first with costmap view shifted and second with correct visualisation after disable and then enable costmap view in rviz:
Here is video: video I use ROS Indigo, Ubuntu 14.04. I tried at different computers, on VM and without, at just-installed ROS with same result. Thanks |
| 2015-04-24 02:44:28 -0500 | asked a question | Rviz doesn't update rolling-window costmap origin Rviz doesn't update rolling-window costmap origin. If I disable and then enable costmap view in rviz, it updates. But rviz itself doesn't translate cosmap update, it draws it with old origin. It even happens for husky_navigation example. How could I configure rviz to view rolling-window cosmap with moving origin right? Thanks |
| 2014-04-30 21:25:18 -0500 | received badge | ● Student (source) |
| 2014-03-30 22:48:42 -0500 | received badge | ● Famous Question (source) |
| 2014-03-06 04:12:59 -0500 | received badge | ● Notable Question (source) |
| 2014-03-05 20:08:15 -0500 | commented answer | How can I use Qt 5 with ROS catkin? I tried, but it says "CMake Error at /home/roman/Qt/5.2.1/gcc/lib/cmake/Qt5/Qt5Config.cmake:3 (message): Qt5 requires at least CMake version 2.8.9 Call Stack (most recent call first): test/CMakeLists.txt:9 (find_package)". ROS Hydro Medusa uses CMake 2.8.3... |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.