The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-04-19 05:16:33 -0500 | received badge | ● Famous Question (source) |
| 2016-10-18 01:19:41 -0500 | received badge | ● Notable Question (source) |
| 2016-06-24 23:38:18 -0500 | received badge | ● Famous Question (source) |
| 2016-06-16 15:39:14 -0500 | received badge | ● Popular Question (source) |
| 2016-06-16 15:16:48 -0500 | commented answer | Can I use WiringPi on ROS indigo ? BTW, to whom may concern, |
| 2016-06-16 14:55:43 -0500 | received badge | ● Supporter (source) |
| 2016-06-16 14:52:41 -0500 | commented answer | Can I use WiringPi on ROS indigo ? Finally get it down! @wilsonz91, @luc, Thanks so much for replying me the comment. They really help. Thank you @luc for sharing your project code to me, thanks you a Tons! |
| 2016-06-16 00:27:54 -0500 | commented answer | Can I use WiringPi on ROS indigo ? Hi, I followed your instruction and setup the wiringPi in my ROS node, but I encountered the issue that "wiringPiSetup: Must be root. (Did you forget sudo?)" I know that this is related to the root permission, how do you overcome this? Thanks in advance. |
| 2016-06-14 17:13:00 -0500 | received badge | ● Notable Question (source) |
| 2016-06-05 01:36:07 -0500 | commented question | ros-control joint state Thank you! gvdhoorn. Now I have update the question. For the github, I was new to git and github so I just uploaded all my file at that time. I will take you advise next time, thank you :) |
| 2016-06-05 01:33:37 -0500 | received badge | ● Editor (source) |
| 2016-06-04 23:12:35 -0500 | commented answer | Did ros-kinetic-gazebo-ros-control package release? I see, Thank you very much, infinita. |
| 2016-06-04 23:12:08 -0500 | received badge | ● Popular Question (source) |
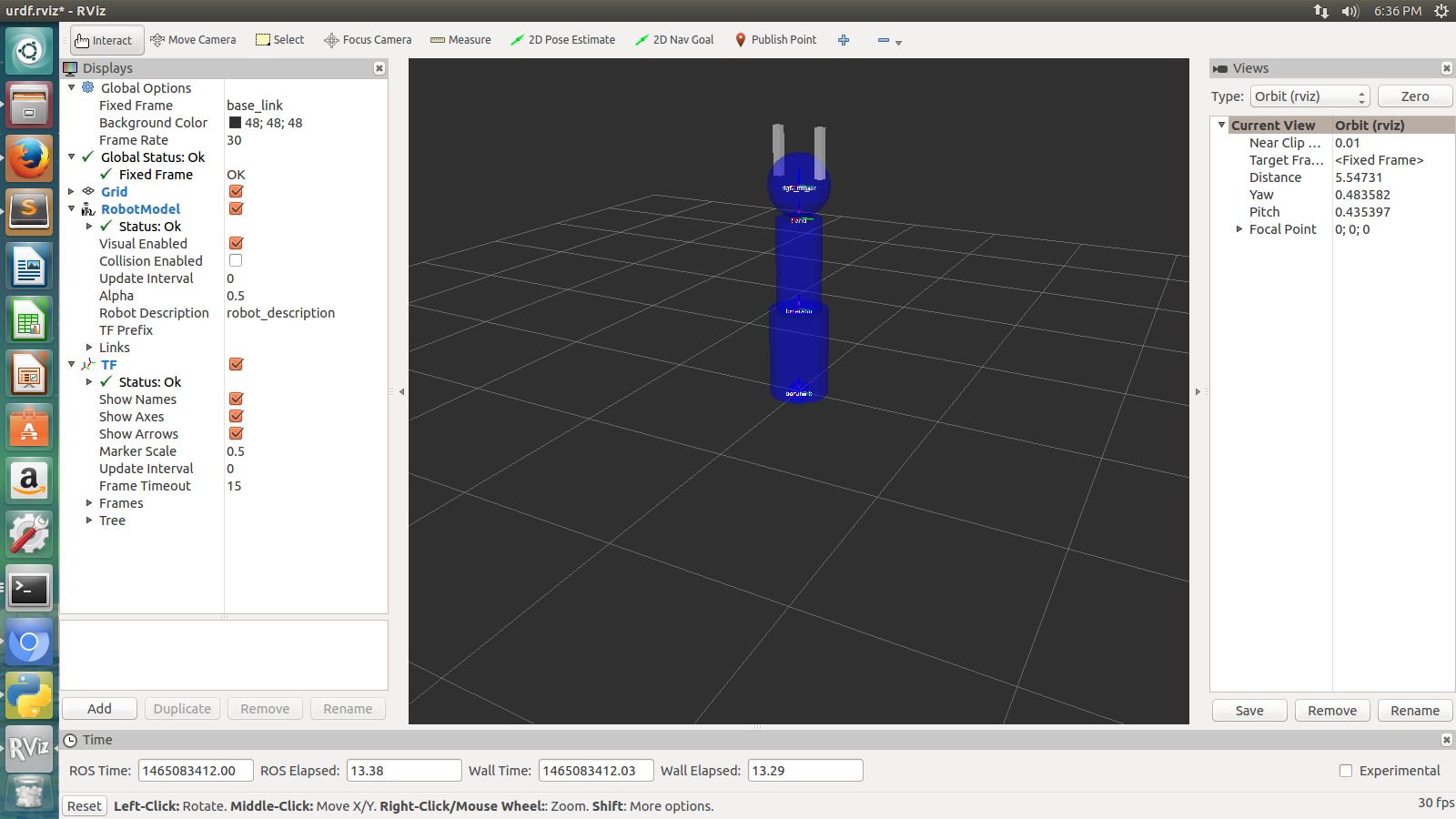
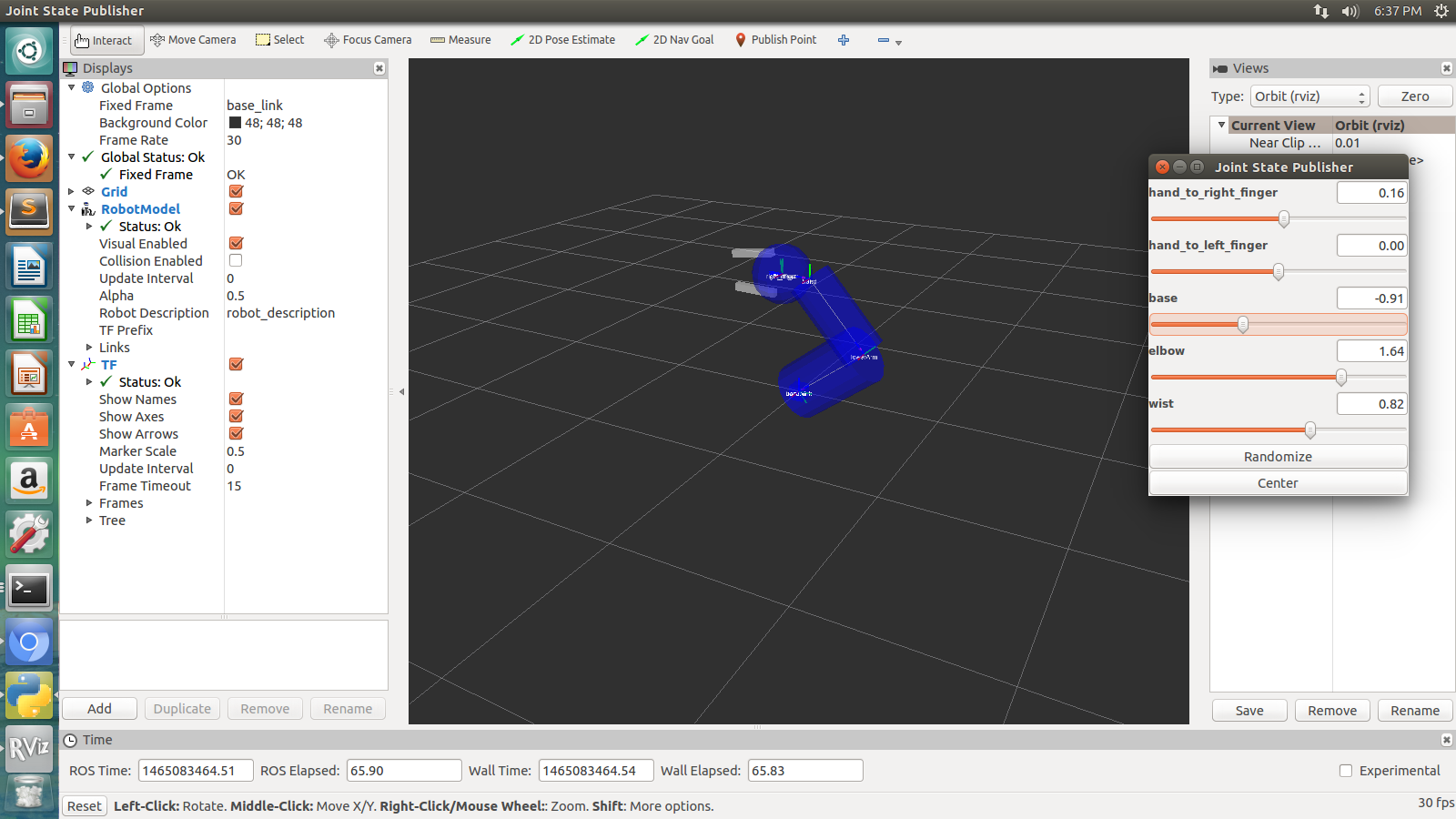
| 2016-06-04 19:01:54 -0500 | asked a question | ros-control joint state Hi, I am trying to build a my own robot in gazebo following this tutorial Here is my xacro file in rviz
and I do can move each joint around in rviz. Everything looks so good so far.
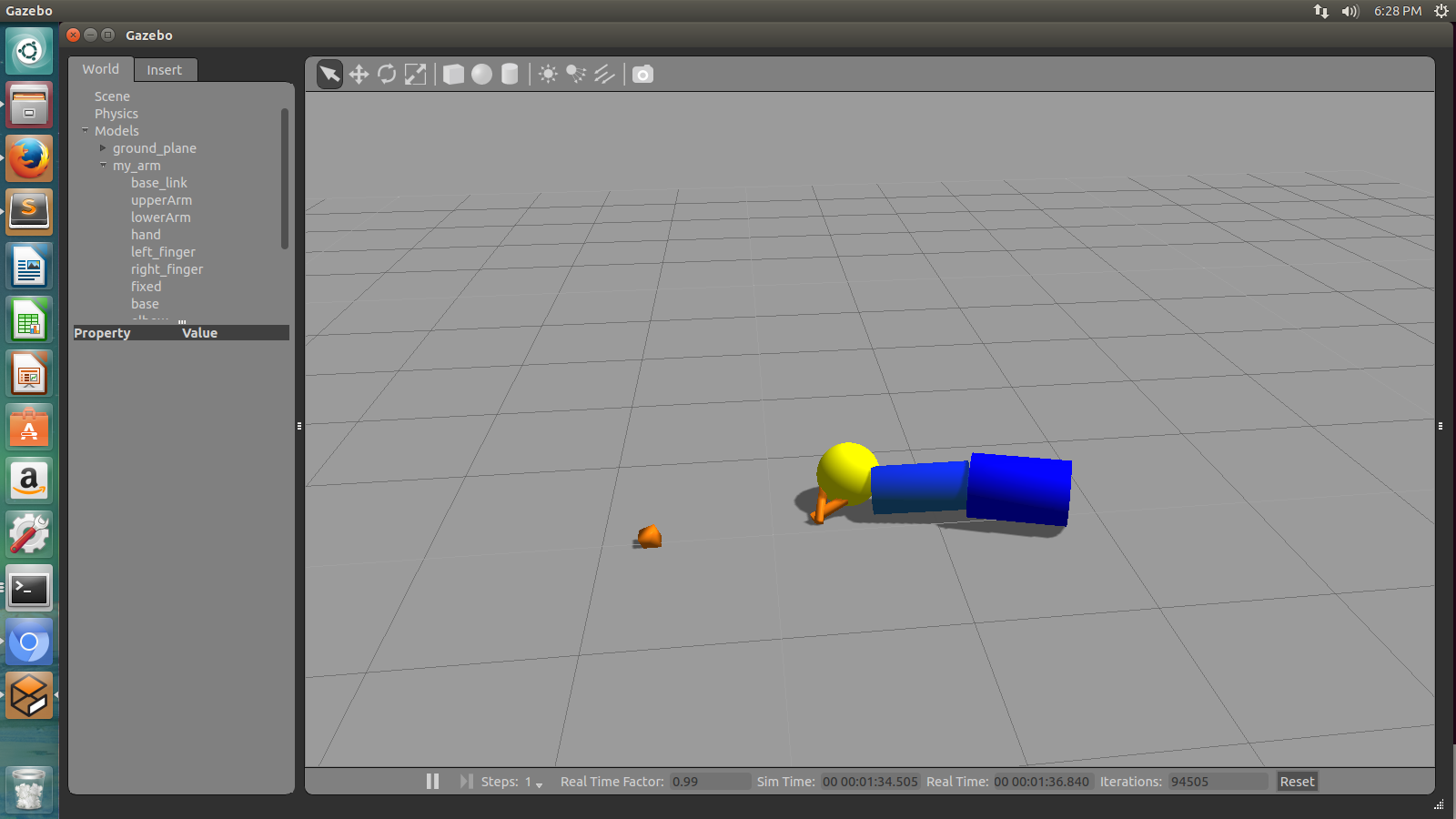
Then I want to simulate my robot in gazebo. There is what it looks like before I launch the ros_control.
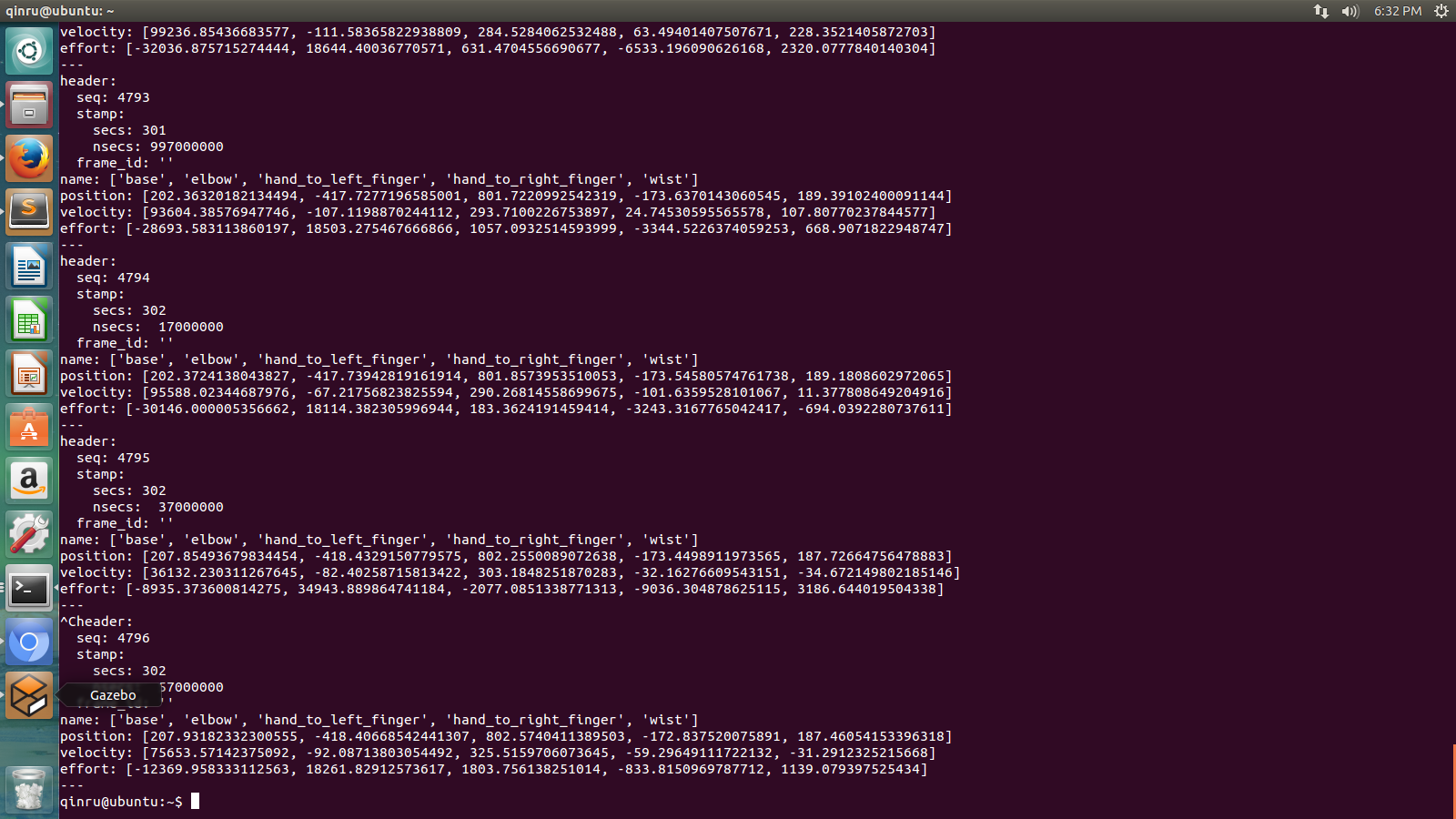
But when I launch ros_control (I try not to launch gazebo and ros_control together which is recommended in the tutorial because of debugging purpose...) My robot_arm seems being dragged by a mysterious great force and fly high up like a rocket and quickly disappeared in the gazebo world. My guess is the ros_control node publishes some messages without my awareness. The result of I echoing my Joint_State rostopic is the following
So I find that there is a HUGE VARIATION on the effort and velocity. The position has also very big numbers, but they are quite consistent. TWO questions: 1, Is it where the bug is? What exactly is going on? 2, Why my robot cannot stand still like it did in rviz? why it always crash down in the gazebo world? (sry for not posing it directly in the question here because it requires >5 points to upload a file and I just get 1 point now) I will also post my xacro file link here in case you need it. Thank you in advance. UPDATE: So I think I locate the bug of the first question. The problem is my PID values in "my_arm_control.yaml" file. They are so big that leads the model to unstable behavior. My current solution is to set P and D to zero. And now my robot can lying on the ground from my observation so far! Some improvement at least.... But I still don't know why it will lie on the ground and why there is no physical collision between each link of the robot, i.e. for example the yellow ball can go inside the blue cylinder. |
| 2016-06-02 14:43:42 -0500 | commented answer | Did ros-kinetic-gazebo-ros-control package release? Or redirect the filename in the gazebo plugin? |
| 2016-06-02 14:43:14 -0500 | commented answer | Did ros-kinetic-gazebo-ros-control package release? Thank you Infinita! But then then libgazebo_ros_control.so is installed in home/user/catkin_ws/devel/lib, instead of in opt/ros/kinetic/lib. And I concern that the gazebo plugin cannot find this file because it is not in the right position. Should we copy the file back to opt/ros/kinetic/lib |
| 2016-06-01 13:35:27 -0500 | asked a question | Did ros-kinetic-gazebo-ros-control package release? Hi, I am trying to control my robot in the gazebo. But after following the tutorial, I get warning
which is very similar to this answer. After tracking back, I find that I did not have "libgazebo_ros_control.so" file in my system. So I guess it is because I did not install ros-kinetic-gazebo-ros-control as instructed in the gazebo website. But when I try to type
I get this message
The gazebo_ros_control package for kinectic doesn't exist. I think that is why I don't have "libgazebo_ros_control.so" file in my system. How could I install ros-kinetic-gazebo-ros-control? Or does anyone know where my initial bug is? Thanks in advance. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.