The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-12-05 06:40:13 -0500 | received badge | ● Great Question (source) |
| 2018-10-09 07:24:14 -0500 | received badge | ● Good Question (source) |
| 2016-09-16 08:17:01 -0500 | received badge | ● Famous Question (source) |
| 2016-08-05 06:18:22 -0500 | received badge | ● Notable Question (source) |
| 2016-08-05 06:18:22 -0500 | received badge | ● Popular Question (source) |
| 2016-07-22 15:28:51 -0500 | received badge | ● Famous Question (source) |
| 2016-06-17 04:10:04 -0500 | received badge | ● Enthusiast |
| 2016-06-16 11:36:56 -0500 | received badge | ● Nice Question (source) |
| 2016-06-16 09:04:43 -0500 | received badge | ● Supporter (source) |
| 2016-06-16 06:06:20 -0500 | received badge | ● Student (source) |
| 2016-06-16 05:18:44 -0500 | received badge | ● Editor (source) |
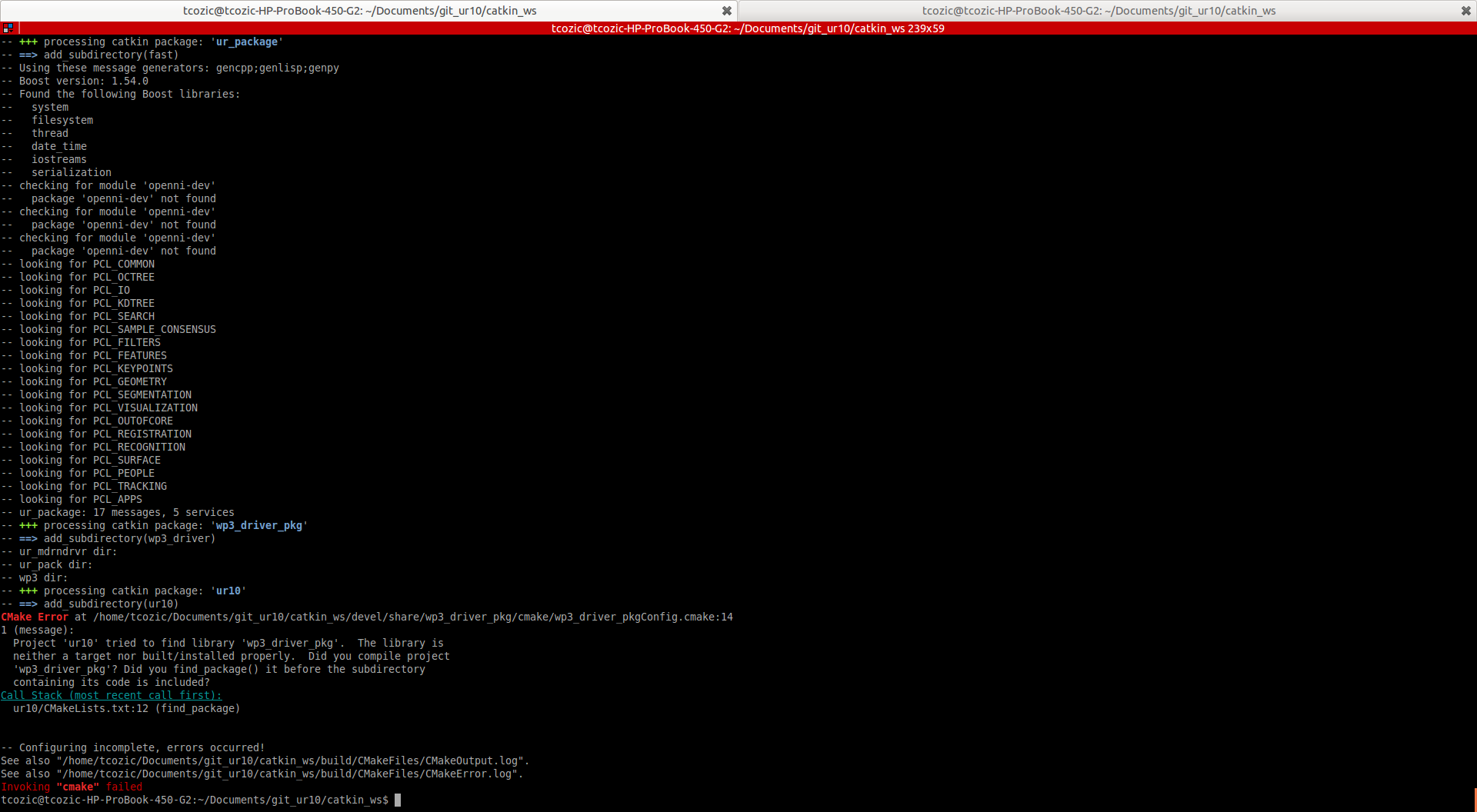
| 2016-06-16 05:04:53 -0500 | asked a question | "The library is neither a target nor built/installed properly" Hello, Hello I have a package called wp3_driver_pkg which builds without errors when I build it alone but when I'm trying to use it in another package (ur10) I have the following error : The package wp3_driver_pkg has been added to the ur10 package.xml for build and run. and is called in the cmakefile.txt of the ur10: This is the catkin_package() in the cmakefile.txt for the wp3_driver_pkg the wp3_driver_lib is a library added in the same cmakefile with the source file I can even see the package being built before in the terminal :
And if I use the command "rospack fin wp3_driver_pkg" just after the failed compilation and the package is found, even if I suppress the devel and build folder of the workspace. Thanks for the answers if you see what I'm doing wrong ! |
| 2016-06-10 10:44:56 -0500 | received badge | ● Scholar (source) |
| 2016-06-10 10:44:51 -0500 | received badge | ● Notable Question (source) |
| 2016-06-02 12:58:54 -0500 | received badge | ● Popular Question (source) |
| 2016-06-02 07:21:02 -0500 | commented question | Catkin/Ros “undefined reference to” I just checked, all the functions in errors are implemented,
for exemple :
|
| 2016-06-01 13:32:43 -0500 | asked a question | Catkin/Ros “undefined reference to” I'm trying to build a project with ROS, but I keep getting "undefined reference to <<class::function>>" errors, for exemple : This is my CmakeLists.txt for the compilation of this package : |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.