The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-05-20 01:04:16 -0500 | marked best answer | Indoor Robot with No absolute starting yaw Our indoor wheeled robot with wheel encoders has an IMU without magnetometers. At startup in a random orientation the yaw output is 0. We are able to follow a wall and cross into another room where an internal GPS is set up to determine X, Y and yaw with respect to global map frame of the room. We are using |
| 2018-06-08 11:52:09 -0500 | received badge | ● Famous Question (source) |
| 2018-04-13 07:13:46 -0500 | received badge | ● Notable Question (source) |
| 2018-03-08 09:58:43 -0500 | received badge | ● Popular Question (source) |
| 2018-02-27 17:31:19 -0500 | asked a question | Indoor Robot with No absolute starting yaw Indoor Robot with No absolute starting yaw Our indoor wheeled robot with wheel encoders has an IMU without magnetometers |
| 2017-08-22 12:12:56 -0500 | commented answer | Is there a way to use the navigation stack without stopping at goals? we used a path tracking algorithm. In our case Pure Pursuit worked, although we had to develop from scratch. |
| 2017-08-08 01:18:07 -0500 | received badge | ● Famous Question (source) |
| 2017-08-07 08:34:37 -0500 | received badge | ● Scholar (source) |
| 2017-08-07 08:33:22 -0500 | answered a question | Is there an existing speed control node to connect the robot_localization state estimator with the diff_drive_controller? We couldn't find anything that could be used with only minor modifications so we developed a pure pursuit type of naviga |
| 2017-03-20 14:00:32 -0500 | received badge | ● Famous Question (source) |
| 2017-02-16 00:51:38 -0500 | received badge | ● Notable Question (source) |
| 2017-01-17 12:39:05 -0500 | answered a question | gazebo start issue: segmentation fault I've had this issue. Seems to be related to graphics card. Take a look at http://answers.ros.org/question/44818... and http://answers.ros.org/question/22382... |
| 2016-12-01 03:29:34 -0500 | received badge | ● Famous Question (source) |
| 2016-11-03 09:27:39 -0500 | commented answer | quaternions orientation representation |
| 2016-09-20 21:24:36 -0500 | received badge | ● Nice Question (source) |
| 2016-09-20 11:47:43 -0500 | received badge | ● Notable Question (source) |
| 2016-09-19 14:57:21 -0500 | commented answer | Is there a way to use the navigation stack without stopping at goals? Thanks. How would the local_planner know to not stop when it reaches each intermediate goal? |
| 2016-09-19 02:36:05 -0500 | received badge | ● Student (source) |
| 2016-09-18 19:52:14 -0500 | received badge | ● Popular Question (source) |
| 2016-09-17 19:30:57 -0500 | asked a question | Is there a way to use the navigation stack without stopping at goals? This question was asked by someone else in 2013, but never answered. So giving it another shot as I'm sure there are other people besides me with similar question. Using ROS Indigo, we have an indoor robot that is to follow a pre-planned trajectory at a constant speed. There are no obstacles. Can move_base, base_local_planner be used to generate the required velocity commands such that the robot passes through the goal (waypoint) at a predetermined pose and speed and continues towards the next goal at the same linear speed and without stopping until it reaches the last (end) goal? If move_base won't work is there a package that could? The yocs_waypoints_navi package seems to use move_base and internally creates a new goal before the old one is reached for "waypoint navigation", but there is very little documentation on how to use. |
| 2016-09-13 16:46:01 -0500 | received badge | ● Famous Question (source) |
| 2016-09-05 14:50:48 -0500 | commented question | Is there an existing speed control node to connect the robot_localization state estimator with the diff_drive_controller? I think the global planner goal format is a |
| 2016-08-31 13:23:33 -0500 | received badge | ● Popular Question (source) |
| 2016-08-17 10:46:59 -0500 | received badge | ● Notable Question (source) |
| 2016-08-17 10:23:39 -0500 | received badge | ● Notable Question (source) |
| 2016-08-11 12:13:00 -0500 | answered a question | robot_localization publishing to tf incorrectly by changing the |
| 2016-08-11 10:15:48 -0500 | received badge | ● Popular Question (source) |
| 2016-08-11 07:03:23 -0500 | commented question | robot_localization publishing to tf incorrectly Thank you. I've posted image. |
| 2016-08-11 07:02:38 -0500 | received badge | ● Editor (source) |
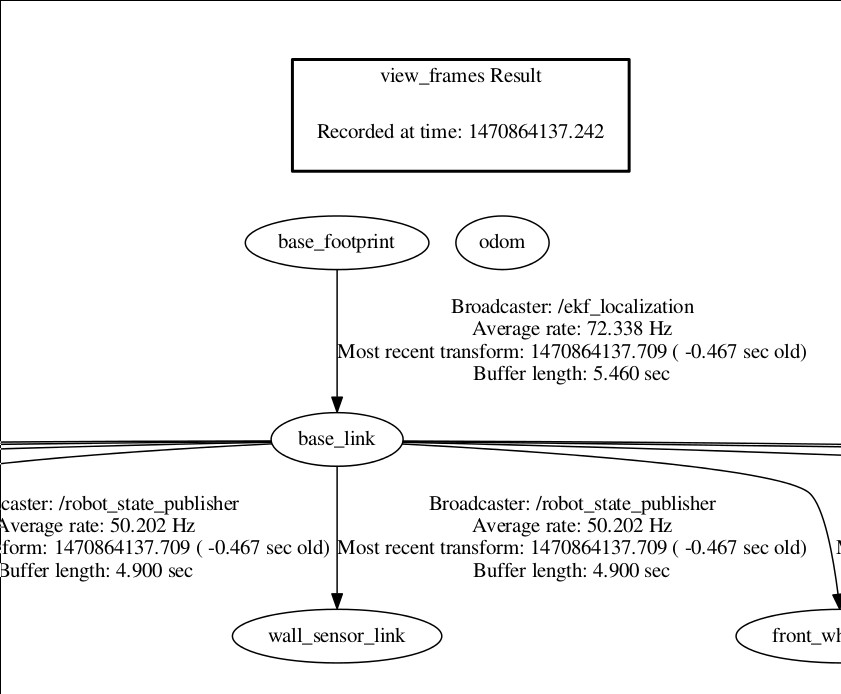
| 2016-08-10 17:18:57 -0500 | asked a question | robot_localization publishing to tf incorrectly I have left the robot_localization odom_frame parameter with value "odom" and base_link_frame to "base_link" defaults. The tf tree, while running robot_localization and the robot driver ca_driver with publish_tf set to "false". Looks like this (apparently I can't upload a file with less than 5 points): odom floating. base_footprint ---> base_link (broadcaster /ekf_localization) base_link --> right_wheel link (broadcaster /robot_state_publisher) base_link --> left_wheel link (broadcaster /robot_state_publisher) .... why is ekf_localization broadcasting base_footprint --> base_link ? and leaving odom floating? (not connected to anything) I can't even find base_footprint anywhere in the robot_localization parameter list. It is part of the robot description. Any help clarifying this would be appreciated. Edit Adding image of original tf tree
|
| 2016-08-03 14:50:44 -0500 | asked a question | Is there an existing speed control node to connect the robot_localization state estimator with the diff_drive_controller? I am using ROS Indigo on a differential drive robot for indoor use (no GPS). The path is pre-determined and the velocity along the path is to be controlled. I believe that move_base node would be overkill and probably would not work in this case. Speed along path needs to be at a certain rate and if an obstacle is detected the unit will stop and send an alarm. I think a 2-D PID speed controller (linear and angular vel.) and a path planner that reads from the pre-planned path and provides the commanded 2-D speed is all that is needed. Is there an existing ROS node I could use or modify? |
| 2016-07-12 12:44:26 -0500 | received badge | ● Popular Question (source) |
| 2016-07-10 21:50:08 -0500 | asked a question | Odometry calibration for Create Using ROS Indigo and the create_autonomy package I'm able to control an iRobot Create 2. I would like to calibrate the odometry using a method similar to that used for the Turtlebot - or simpler. Just by moving manually a certain distance and measuring with a measuring tape the robot distance to obtain a correction factor that can then be incorporated into the driver to improve accuracy. Same for angular correction. I'm aware of http://answers.ros.org/question/23252... but would rather measure and enter a linear and angular calibration correction factor for a given floor type that takes care of any inconsistencies. Any help or insight would be appreciated. |
| 2016-06-09 08:53:51 -0500 | received badge | ● Enthusiast |
| 2016-06-02 03:33:46 -0500 | received badge | ● Famous Question (source) |
| 2016-06-01 15:10:52 -0500 | answered a question | ROS cannot find any package in new workspace Was able to solve by following the steps here http://answers.ros.org/question/20320... The key was deleting the ws_A build and devel folders. also insured that roscore wasn't running - not sure if that mattered or not. |
| 2016-05-31 07:40:52 -0500 | received badge | ● Notable Question (source) |
| 2016-05-30 18:40:15 -0500 | received badge | ● Popular Question (source) |
| 2016-05-27 18:58:25 -0500 | asked a question | ROS cannot find any package in new workspace I have two workspaces ws_A and ws_B with same packages. ws_A is the original and ws_B is a copy. I have gone through the catkin and overlaying tutorials with no avail. I have modified ROS_PACKAGE_PATH, done $ workspace_init, $ catkin_make on ws_B successfully, opened new terminals and done $ source ~/ws_B/devel/setup.bash. Regardless, a roscd package always sends me to the original ws_A folder. I've looked at other accepted answers and tried source /opt/ros/indigo/setup.bash first with no luck. It simply doesn't see ws_B. Using ROS Indigo and Ubuntu 14.04 Any help would be appreciated, in particular the exact steps required to see ws_B. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.