The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-06-01 10:21:21 -0500 | received badge | ● Good Answer (source) |
| 2021-04-11 16:27:00 -0500 | received badge | ● Good Answer (source) |
| 2021-03-29 11:44:13 -0500 | received badge | ● Notable Question (source) |
| 2021-03-29 11:44:13 -0500 | received badge | ● Famous Question (source) |
| 2020-01-16 00:00:23 -0500 | marked best answer | hector_mapping_parameters Hello ! I used hector_mapping with a simulated robot. Firstly, I used the default values for all parameters specified on the ROS website http://wiki.ros.org/hector_mapping for hector_mapping. But now, I would like to tune these parameters and I don't understand what the map_multi_res_levels parameter is supposed to do ? If anyone could help me, I will be grateful. lfr |
| 2019-12-06 04:40:32 -0500 | received badge | ● Nice Answer (source) |
| 2019-02-09 11:58:09 -0500 | marked best answer | KUKA Youbot navigation simulation Hello, But when I try to move the robot after doing the following indications to bring up the navigation stack: http://wiki.ros.org/youbot_navigation , the robot doesn't move. I have some errors with the hokuyo_node. I found that the youbot_oodl package provided here: https://github.com/youbot/youbot-ros-... is not functional (the OODL include files are missing). If someone can help me, I will be grateful, lfr |
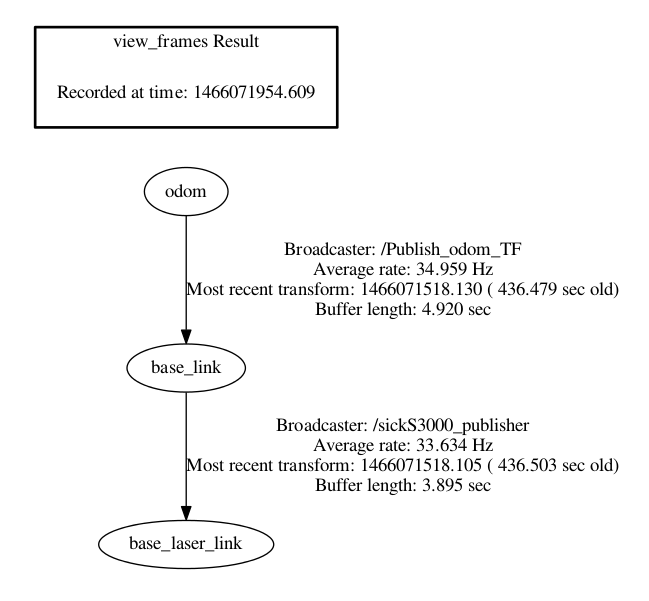
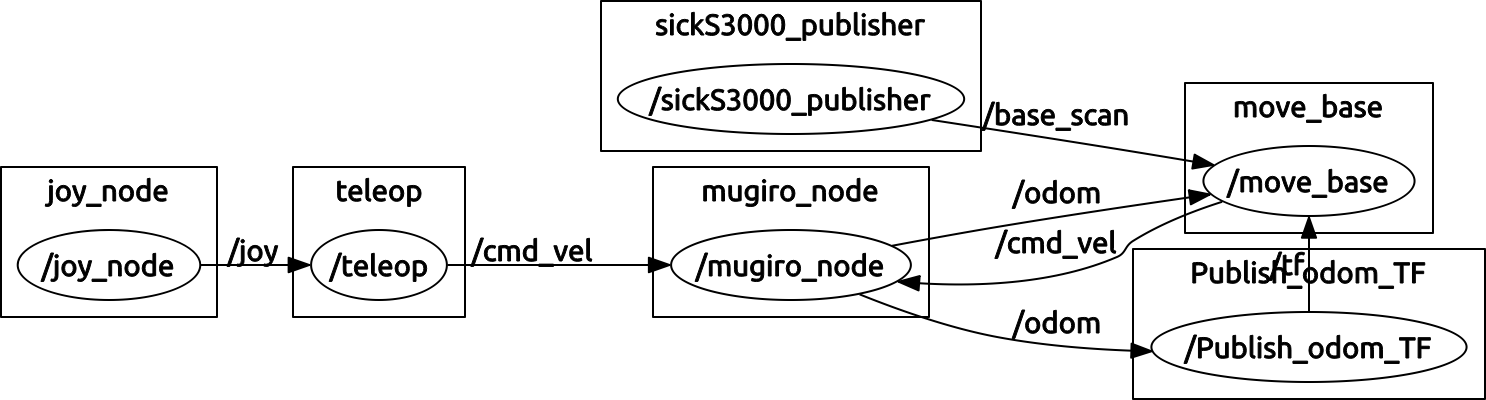
| 2019-01-13 17:43:53 -0500 | marked best answer | move_base action server doesn't come up with a real robot Hello ! I try to run the move_base node on a real robot. When I run it in simulation (with another robot), it works successfully. Moreover, when I run my own C++ node in order to send a goal command, the program stays blocked inside the waitForServer loop, this loop is as follows: I don't understand why it doesn't work and why when I run the move_base node the move_base action server doesn't come up. update 1 Here the result of the roswtf command: You can find the tf tree below: And the graph here: |
| 2019-01-13 17:43:53 -0500 | received badge | ● Self-Learner (source) |
| 2018-10-16 08:56:52 -0500 | received badge | ● Famous Question (source) |
| 2018-08-21 07:34:48 -0500 | received badge | ● Famous Question (source) |
| 2018-01-30 22:57:16 -0500 | received badge | ● Popular Question (source) |
| 2017-10-27 05:25:32 -0500 | marked best answer | Holonomic planner for navigation Hello ! If someone can tell me how to configure my planner in order to do this, I will be very grateful. lfr |
| 2017-08-07 05:54:21 -0500 | received badge | ● Famous Question (source) |
| 2017-03-15 00:49:53 -0500 | received badge | ● Good Answer (source) |
| 2017-03-15 00:49:53 -0500 | received badge | ● Enlightened (source) |
| 2017-01-05 21:23:10 -0500 | received badge | ● Nice Question (source) |
| 2017-01-05 21:22:56 -0500 | marked best answer | How to see all parameters in the parameter server ? Hello everyone ! I use the eband_local_planner for the navigation of my robot in simulation. If anyone can help me, I will be grateful, |
| 2016-10-09 15:28:30 -0500 | received badge | ● Nice Answer (source) |
| 2016-09-06 03:14:07 -0500 | received badge | ● Famous Question (source) |
| 2016-09-02 12:14:55 -0500 | answered a question | Robot can't reach goal and keep rotate endless Hi there ! In your launch file, you did not specify what planner to use. Personally, I used the eband_local_planer for omni-directional navigation. Then, you just have to create and fill the YAML file for the configuration of the eband_local_planner, let's call it (I supposed you put your yaml file inside a folder named "config", of course, you can put it where you want). You can find all the information about the eband_local_planner here: eband_local_planner I sincerely hope it will help you, |
| 2016-08-09 06:33:29 -0500 | answered a question | Navigation ideas Hello, I'm not sure if it is what you want but you can use the SLAM for localization. I hope it will help you, |
| 2016-08-09 05:14:56 -0500 | commented question | Undefined reference to ros::init on Jade I don't know if it will work but you can try to write |
| 2016-08-04 04:45:04 -0500 | received badge | ● Notable Question (source) |
| 2016-08-04 02:00:27 -0500 | answered a question | navigation Hello, I don't know if I understood your question correctly but perhaps you should use the navigation stack with move_base. You will be able to move the robot to a desired position. I hope it will help you, |
| 2016-08-03 01:40:06 -0500 | commented answer | Navigation stack, where to set controller_frequency? You're welcome |
| 2016-08-02 01:48:07 -0500 | commented question | Move base for autonomous driving Yes, you can do autonomous driving, of course. I just said that you cannot expect to have real-time reactions using ROS. With real-time, I thought very fast computations (needed in case of outdoor autonomous driving). |
| 2016-08-01 06:02:51 -0500 | commented question | Move base for autonomous driving The problem is not move_base but ROS. It is unable to respect fast real-time constraints. If you want fast responses, I think using ROS is not the best idea. Obviously it depends on the complexity of the computations (ROS is able to compute simple algorithms in real-time). |
| 2016-08-01 02:03:19 -0500 | commented answer | Navigation stack, where to set controller_frequency? It worked successfully, |
| 2016-07-29 10:04:30 -0500 | received badge | ● Notable Question (source) |
| 2016-07-29 02:40:27 -0500 | answered a question | Navigation stack, where to set controller_frequency? I think it should work. In your move_base.launch, you have to have the following lines somewhere: I write And now, it should work properly. You can check the existence of the parameter using the command I hope it will help you, |
| 2016-07-29 02:21:05 -0500 | answered a question | catkin_create_pkg failure As Dirk Thomas well said, the problem is that your user name contains a '@'. When you create a package, And, it seems that if the email address is not valid, the process will stop. I hope it helps you, |
| 2016-07-28 03:33:13 -0500 | asked a question | ros indigo gazebo_ros_pkgs empty Hello ! I need to migrate some packages from ros groovy to ros indigo. Moreover, some of launch files of the concerned package use stuffs inside the If someone could help me, I will be very grateful, |
| 2016-07-06 05:34:29 -0500 | answered a question | navigation transform information problem Hello, I give this answer because it is possible that someone else have the same problem. I found that the problem is with the communication between the robot and my computer. The only solution I can see is to improve the communication way. I hope it can help someone to find the problem, |
| 2016-07-06 05:25:00 -0500 | commented question | navigation transform information problem Thanks for answering me. The launch files are correct. I found the problem is the communication between the robot and my computer. There are some packets which are loss. |
| 2016-07-06 03:52:24 -0500 | received badge | ● Popular Question (source) |
| 2016-07-05 05:43:19 -0500 | asked a question | navigation transform information problem Hello ! I try to run the navigation stack with a real robot (move_base + gmapping). When I send no goal, I get this warning randomly: And when I send a goal, I get this warning randomly: When the first warning appear, the robot begins to get an hesitating behaviour with very slow speeds. |
| 2016-07-04 01:56:13 -0500 | commented answer | How can I do a GUI ? Good luck ! |
| 2016-07-04 01:55:57 -0500 | commented answer | How can I do a GUI ? You have to write the includes you need (ros.h, ...) and you will be able to use the ros functions as you want. You can write data on topics in order to interact with other nodes (or use the ros services). If you want to set parameters, you would be able to interact with the ros parameter server. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.