The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-05-26 15:04:39 -0500 | received badge | ● Famous Question (source) |
| 2020-01-22 06:41:07 -0500 | received badge | ● Famous Question (source) |
| 2019-09-10 03:06:06 -0500 | received badge | ● Famous Question (source) |
| 2019-05-20 02:31:36 -0500 | marked best answer | Where can i find the actor model for ROS Indigo and Gazebo2.2 version? I want use face_detector package. To use this package in simulation, i need to create the faces or actors in the gazebo simulator. Can anyone please help where can i find the actor models for ROS indigo with Gazebo2.2 version. Or is there any better way to detect and track the faces using face_detector without actor models? |
| 2019-03-20 11:40:34 -0500 | received badge | ● Popular Question (source) |
| 2019-03-20 11:40:34 -0500 | received badge | ● Notable Question (source) |
| 2019-01-30 03:33:36 -0500 | received badge | ● Notable Question (source) |
| 2018-10-18 07:55:58 -0500 | marked best answer | Why TransformListener initializiton giving an AttributeError? I am trying to transform a point from a map frame to camera frame. But i was getting an AttributeError. I followed this api and wrote the following code. In the above code, i was created a point in "map" frame and trying to transform into "wide_stereo_optical_frame" frame. But, I was getting an error tf.Exception: AttributeError: 'TransformListener' object has no attribute 'Exception' |
| 2018-10-18 07:55:39 -0500 | received badge | ● Student (source) |
| 2018-09-19 17:17:50 -0500 | marked best answer | what could be the reason for my project is missing in .project file? I have created a project from terminal and i was able to run successfully. When try to configure eclipse for the same project, but the project is not visible in eclipse. Hence, i am not able open and run my project in eclipse. here is the steps i followed. cd path/to/catkin/workspace catkin_make --force-cmake -G"Eclipse CDT4 - Unix Makefiles" -DCMAKE_BUILD_TYPE=Debug -DCMAKE_ECLIPSE_MAKE_ARGUMENTS=-j8 After running the above command, .project and .cproject files are created in the <catkin_workspace>/build directory. then i tried to import my project Click File -> Import -> Existing Projects into Workspace (Next) -> Browse (browse to catkin_workspace -> My project is not visible here :-( , i noticed my project is not appearing in the .project file. why my project is missing in .project and how can i open it in eclipse. Can anyone please help me on this? |
| 2018-09-19 14:28:31 -0500 | marked best answer | why rospy time always prining zero? I need a time while running the simulation, but in my code returns zero time. print rospy.get_time(); #output 0 print rospy.Time.now(); #output 0.0 but i see the time in terminal when i run rostopic echo /clock Am i doing anything wrong while reading time? |
| 2018-09-19 14:27:03 -0500 | marked best answer | why the tf.transformPoint is giving tf exception? I am trying to transform a point from a base_link frame to camera frame. When run the below code getting error message "Exception: Lookup would require extrapolation into the future. canTransform returned after 4.003 timeout was 4.Requested time 1466110388.818536997 but the latest data is at time 3101.240000000, when looking up transform from frame [base_link] to frame [wide_stereo_optical_frame].
target = "wide_stereo_optical_frame"; botf base_link and wide_stereo_optical_frame frames are available in tf database. I verified the in the terminal like this |
| 2018-04-29 22:12:36 -0500 | marked best answer | Openni_tracker giving an error message "InitFromXml failed"? I am using ros indigo and kinect xbox. I tried by adding license |
| 2018-04-16 11:27:16 -0500 | received badge | ● Famous Question (source) |
| 2018-03-18 22:21:53 -0500 | received badge | ● Notable Question (source) |
| 2017-09-29 01:01:00 -0500 | received badge | ● Notable Question (source) |
| 2017-09-29 01:01:00 -0500 | received badge | ● Popular Question (source) |
| 2017-08-11 17:39:35 -0500 | marked best answer | How to resoleve Exception: Lookup would require extrapolation into the future? I was publishing a frame using launch file. I was getting below errors. tf2.waitForTransform(src_fram, des_frame, rospy.get_rostime(), rospy.Duration(10.0)); Exception: Lookup would require extrapolation into the future. Requested time 1468340743.794792891 but the latest data is at time 2117.120000000, when looking up transform from frame [bed_frame] to frame [wide_stereo_optical_frame]. canTransform returned after 10.0004 timeout was 10. I have used all time combinations such as rspy.Time(), rospy.get_rostime(), and rospy.Time.now(). but no luck. i also used sleep function for 10 seconds before waitForTransform, this is also not worked here is my code |
| 2017-08-11 17:39:29 -0500 | marked best answer | Is there any ros packge to find the orientation of face? I was able to get face position(x,y,z co-ordinates) using face_detector package. is there anyway to get orientation as well. I was getting face position using stereo and Kinect cameras. |
| 2017-07-04 08:14:39 -0500 | received badge | ● Popular Question (source) |
| 2017-06-06 15:26:07 -0500 | received badge | ● Notable Question (source) |
| 2017-06-06 15:26:07 -0500 | received badge | ● Famous Question (source) |
| 2017-05-21 05:27:14 -0500 | received badge | ● Famous Question (source) |
| 2017-04-07 00:59:42 -0500 | received badge | ● Notable Question (source) |
| 2017-03-02 22:21:00 -0500 | received badge | ● Famous Question (source) |
| 2017-02-03 08:04:50 -0500 | received badge | ● Notable Question (source) |
| 2017-01-09 05:19:13 -0500 | received badge | ● Famous Question (source) |
| 2016-11-28 01:32:32 -0500 | received badge | ● Famous Question (source) |
| 2016-11-09 04:50:36 -0500 | received badge | ● Notable Question (source) |
| 2016-11-02 03:58:01 -0500 | received badge | ● Notable Question (source) |
| 2016-10-27 04:19:41 -0500 | received badge | ● Popular Question (source) |
| 2016-10-12 08:46:00 -0500 | received badge | ● Popular Question (source) |
| 2016-10-12 08:46:00 -0500 | received badge | ● Notable Question (source) |
| 2016-10-12 08:46:00 -0500 | received badge | ● Famous Question (source) |
| 2016-10-09 12:21:01 -0500 | received badge | ● Notable Question (source) |
| 2016-10-09 12:21:01 -0500 | received badge | ● Famous Question (source) |
| 2016-10-06 07:18:33 -0500 | received badge | ● Popular Question (source) |
| 2016-09-07 08:14:50 -0500 | received badge | ● Notable Question (source) |
| 2016-09-06 15:20:56 -0500 | received badge | ● Famous Question (source) |
| 2016-08-25 13:43:08 -0500 | commented question | face_detector process is died yes, it was recently upgraded. Thanks for the reference link. |
| 2016-08-24 18:46:22 -0500 | asked a question | face_detector process is died i am using face_detector package. when i try to launch the face_detector_action.wide.launch , the process is dead without giving any error. I tried to open the log file and check, but log file is not exist in that location. What could be the possible failures of face_detector may fail? I was able to see topics and images in rviz. |
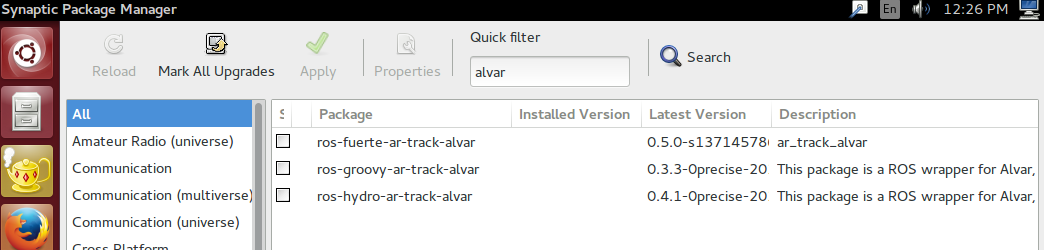
| 2016-08-14 01:09:46 -0500 | marked best answer | Why ar_track_alvar is not installing? When i try to install the ar_track_alvar using sudo apt-get install ros-indigo-ar-track-alvar Reading package lists... Done I also tried using synaptic tool which is alternative to apt-get install. But i was not able to find indigo related alvar packages
Can anyone please help me on this? |
| 2016-08-09 13:22:02 -0500 | received badge | ● Popular Question (source) |
| 2016-08-09 13:13:17 -0500 | answered a question | Why ar_track_alvar is not installing? I followed 1.2 and 1.3 from this link http://wiki.ros.org/indigo/Installati... and sudo apt-get update above steps worked for me, now i was able to install |
| 2016-08-09 13:11:06 -0500 | commented question | Why ar_track_alvar is not installing? Thank you so much for your support, i re-installed the ros indigo keys. i was able to install the ar_track_alvar now. |
| 2016-08-09 12:51:52 -0500 | commented question | Why ar_track_alvar is not installing? ROS was installed through apt-get |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.