The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-03-14 09:34:23 -0500 | received badge | ● Famous Question (source) |
| 2021-03-14 09:34:23 -0500 | received badge | ● Notable Question (source) |
| 2021-03-14 09:34:23 -0500 | received badge | ● Popular Question (source) |
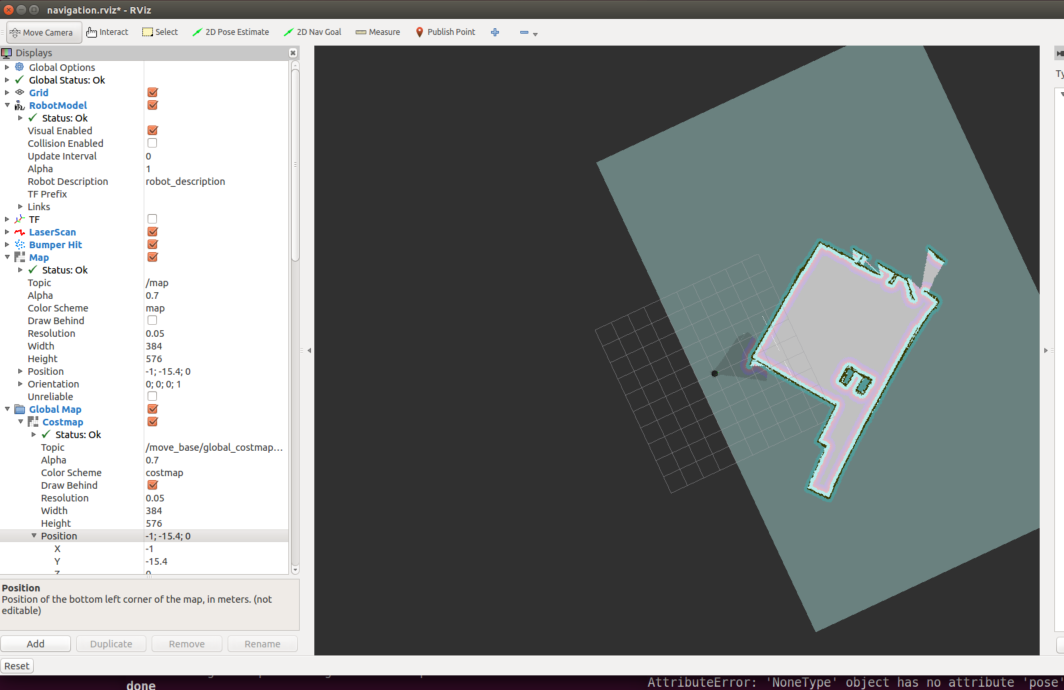
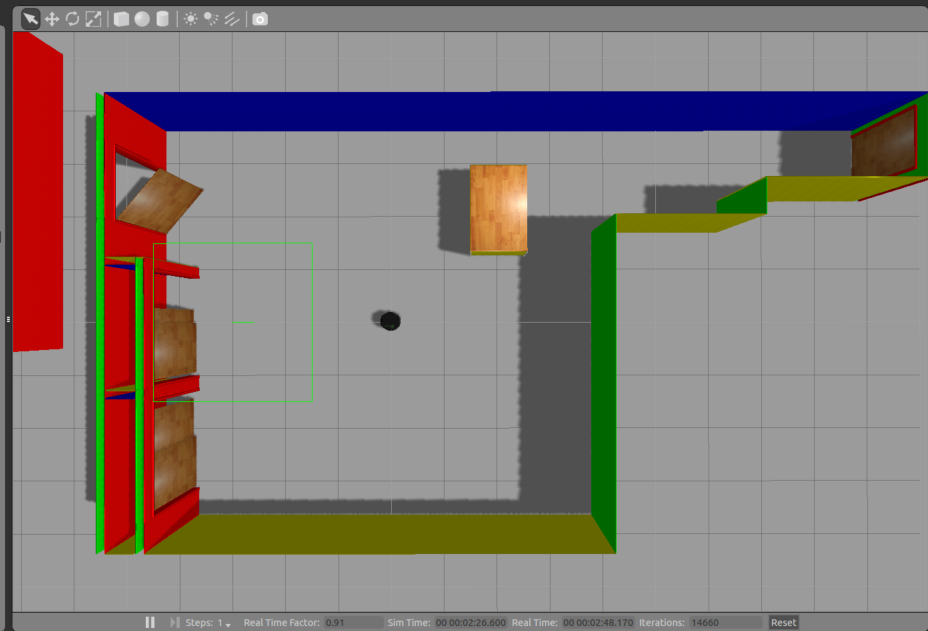
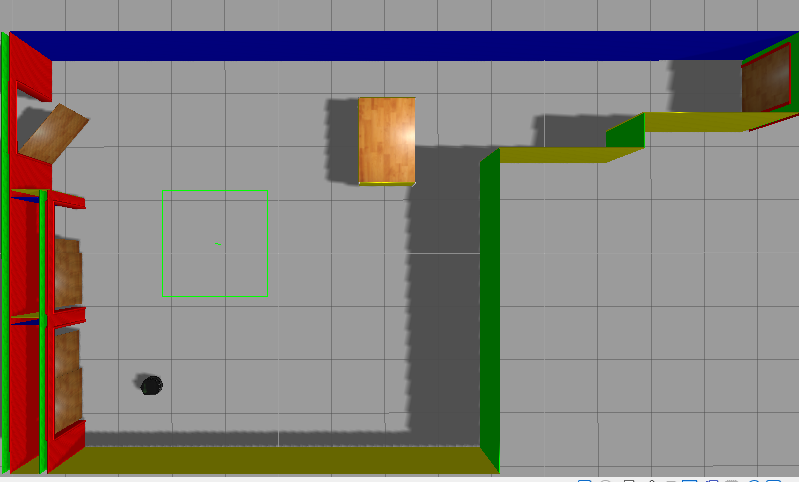
| 2018-08-08 01:21:32 -0500 | marked best answer | Orienting AMCL Map/Global_Costmap I'm running AMCL navigation on a map I created with the "Autonomous Navigation of a Known Map with Turtlebot" tutorial. As you can see below, when I open RViz with "roslaunch turtlebot_rviz_launchers view_navigation.launch", the robot (the little black dot) is not centered in the middle of the map, and I think it has to do with the map's origin, set in the .yaml file.
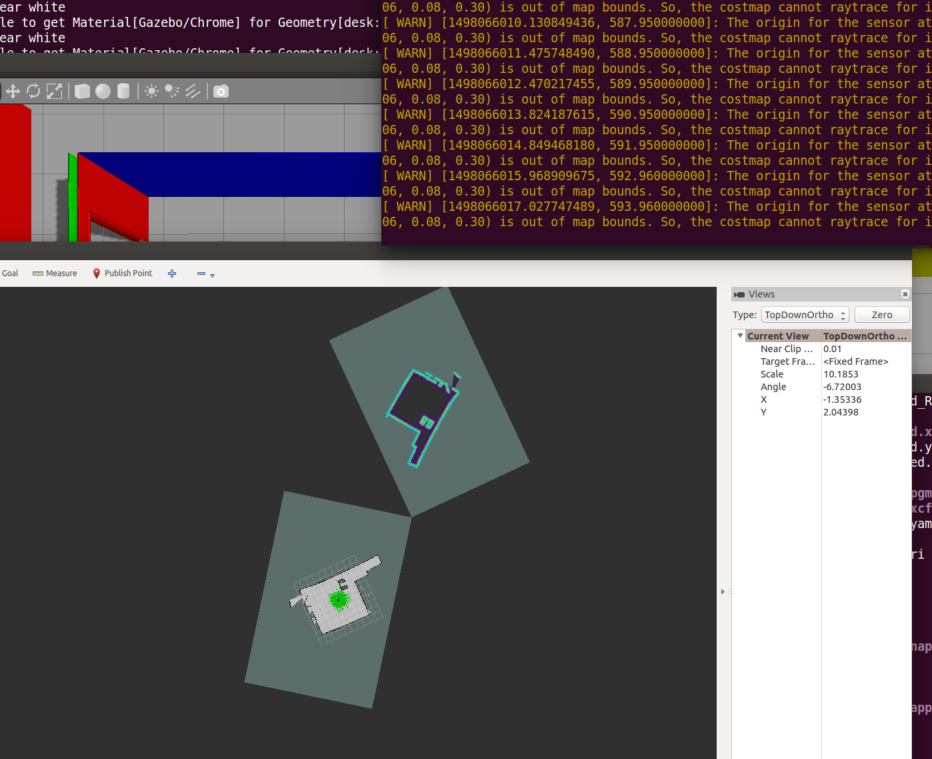
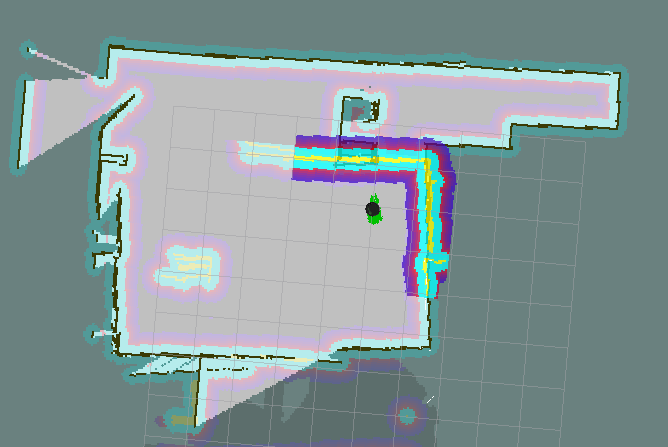
I can reconfigure the origin of the .yaml file to fix the robot's position on the RViz visualization of the map (see the correction in the 3rd picture), but the origin of my Global_costmap hasn't been updated, which means the laserscans aren't aligned with the rest of the map.
Any ideas of what I'm doing wrong? |
| 2018-07-10 19:38:59 -0500 | received badge | ● Famous Question (source) |
| 2018-01-07 11:12:34 -0500 | received badge | ● Notable Question (source) |
| 2017-11-21 05:50:05 -0500 | received badge | ● Famous Question (source) |
| 2017-11-16 19:29:30 -0500 | commented answer | Turtlebot Gazebo Information about pushing objects The odom topic offers wheel velocity - not sure if that will be a helpful indicator of what you're trying to detect. I'v |
| 2017-11-16 18:58:37 -0500 | marked best answer | AMCL Particle Weights Are Always Equal - Why? I'm driving the Turtlebot around the turtlebot_world Gazebo environment. I'm printing out the AMCL particle filter poses and the weights assigned to the poses, and when I drive around for a while (as long as 5 minutes), the weights assigned to the poses in the particle filter are all set to the same value (particle weight = 0.00196, for 500 particles, so they sum to 1, of course). I expected there to be some variety in the particles' weights - some higher, some lower. My theories as to why they're all equal: Here's a code snippet: Function: AmclNode::laserReceived(const sensor_msgs::LaserScanConstPtr& laser_scan) ~Line 1245, Added the following: for(int i=0;i<set->sample_count;i++) { |
| 2017-11-16 18:58:37 -0500 | received badge | ● Scholar (source) |
| 2017-11-11 08:34:21 -0500 | commented answer | AMCL Particle Weights Are Always Equal - Why? Great catch! I moved the print statement to line 1235 before the resampling, and now I'm seeing variety in the particle |
| 2017-11-11 08:15:20 -0500 | received badge | ● Popular Question (source) |
| 2017-11-10 15:10:33 -0500 | received badge | ● Citizen Patrol (source) |
| 2017-11-10 10:48:15 -0500 | edited question | AMCL Particle Weights Are Always Equal - Why? AMCL Particle Weights Are Always Equal - Why? I'm driving the Turtlebot around the turtlebot_world Gazebo environment. |
| 2017-11-10 10:47:57 -0500 | edited question | AMCL Particle Weights Are Always Equal - Why? AMCL Particle Weights Are Always Equal - Why? I'm driving the Turtlebot around the turtlebot_world Gazebo environment. |
| 2017-11-10 09:49:11 -0500 | edited question | AMCL Particle Weights Are Always Equal - Why? AMCL Particle Weights Are Always Equal - Why? I'm analyzing the particle filter output for AMCL, and when I drive around |
| 2017-11-10 09:31:32 -0500 | asked a question | AMCL Particle Weights Are Always Equal - Why? AMCL Particle Weights Are Always Equal - Why? I'm analyzing the particle filter output for AMCL, and when I drive around |
| 2017-11-10 09:05:59 -0500 | answered a question | Turtlebot Gazebo Information about pushing objects I know what you're talking about - in the turtlebot demo environment, when I drive into the white cube, the encounter pu |
| 2017-09-12 11:40:01 -0500 | received badge | ● Notable Question (source) |
| 2017-06-22 03:20:30 -0500 | received badge | ● Popular Question (source) |
| 2017-06-21 19:54:47 -0500 | answered a question | Orienting AMCL Map/Global_Costmap I think you should be able to edit the param\Kinect_costmap_params.yaml file under turtlebot_navigation package, and add |
| 2017-06-21 19:30:46 -0500 | commented question | Orienting AMCL Map/Global_Costmap I realized the global_costmap is somehow getting its Position (x, y) and Orientation set somehow...I just can't figure o |
| 2017-06-21 17:58:37 -0500 | edited question | Orienting AMCL Map/Global_Costmap Orienting AMCL Map/Global_Costmap I'm running AMCL navigation on a map I created with the "Autonomous Navigation of a Kn |
| 2017-06-21 12:29:09 -0500 | received badge | ● Organizer (source) |
| 2017-06-21 12:28:06 -0500 | asked a question | Orienting AMCL Map/Global_Costmap Orienting AMCL Map/Global_Costmap I'm running AMCL navigation on a map I created with the "Autonomous Navigation o |
| 2017-03-27 17:05:02 -0500 | answered a question | How can I dynamically get the coordinate of a model from gazebo? Like tfoote said, there are two different ideas going on here.
I use the Turtlebot with Gazebo, and when I need to drive from one point to the next, I use the AMCL package to make a map of the environment, and then I plug the map into AMCL and use the RViz GUI to set a goal and it drives the Turtlebot to where I want it. In this case, you're making a map of a room by collecting enough laserscan data to outline entire objects. AMCL also publishes where it thinks the robot is in the environment as you drive on the AMCL/amcl_pose topic. The tough part - and what I don't know the answer to, but the object recognition link from tfoote might help - is figuring out/somehow identifying that the blob at (3,4) is a couch, or a chair, etc. Here are links to the Turtlebot/Gazebo/AMCL/RViz tutorials. To be clear, I'm not suggesting that they are a solution to your problem. But they're a good demonstration of how localization in Gazebo - using the Kinect data as a makeshift laserscan - works. |
| 2017-01-24 16:23:15 -0500 | received badge | ● Enthusiast |
| 2017-01-19 08:21:07 -0500 | received badge | ● Necromancer (source) |
| 2016-11-23 14:17:13 -0500 | received badge | ● Notable Question (source) |
| 2016-11-23 14:17:13 -0500 | received badge | ● Famous Question (source) |
| 2016-11-04 09:12:46 -0500 | commented answer | Cannot Declare Reference to tf2_msgs::TFMessage I also had to update my CMakeLists and add SET(CMAKE_CXX_FLAGS "-std=c++11") to get the 'auto' and 'thread' stuff to compile. |
| 2016-11-04 08:51:59 -0500 | answered a question | Cannot Declare Reference to tf2_msgs::TFMessage My question was answered on the Gazebo forum. See http://answers.gazebosim.org/question... I ended up needing to use ROS subscribing methods, as used here: http://gazebosim.org/tutorials?tut=gu... and here: https://bitbucket.org/osrf/frc_red_te... |
| 2016-11-04 08:51:05 -0500 | commented question | Cannot Declare Reference to tf2_msgs::TFMessage Thanks for the idea! It turned out that I was using the wrong kind of subscribing options - I was using the Transport objects/methods to connect to ROS messages, when the two are separate communications channels. |
| 2016-11-02 09:36:16 -0500 | asked a question | Cannot Declare Reference to tf2_msgs::TFMessage Background: I had a great callback function in a Gazebo plugin. I declared it with void OnMsg(ConstVector3dPtr &msg) and subscribed-to by my plugin's Load function with subscriber = node->Subscribe("~/eb/vel_cmd", &MyPlugin::OnMsg, this); Problem: Instead of subscribing to "~/eb/vel_cmd", I'm subscribing to "/tf", so I need to change the message type of the callback (MyPlugin::OnMsg) to tf2_msgs::TFMessage. I followed the convention of the question in the link below to create a constant pointer for a tf2_msgs::TFMessage message. http://answers.ros.org/question/21481... Following the positionCb callback declaration in that code, now my callback is declared with: private: void OnMsg(const tf2_msgs::TFMessage::ConstPtr& &msg) I'm getting all kinds of compiling errors, but the biggest problem appears to be "Cannot declare reference to tf2_msgs::TFMessage_<std::allocator<void> >::ConstPtr& {aka class boost::shared_ptr<const tf2_msgs::tfmessage_<std::allocator<void="">>&}' (picture below). Any ideas on what I'm doing incorrectly? Compiling Errors:
|
| 2016-10-26 04:47:24 -0500 | received badge | ● Teacher (source) |
| 2016-10-25 16:12:11 -0500 | answered a question | gazebo spawn_model from .py source code The "Could not find any topics with /gazebo/spawn_model or /gazebo/delete_model even with rostopic list" part stuck out to me. The services (such as /gazebo/delete_model ) are listed when you call rosservice list ie, use rosservice, not rostopic, to check if the spawn/delete services are available. |
| 2016-08-23 06:37:26 -0500 | received badge | ● Popular Question (source) |
| 2016-08-20 05:19:02 -0500 | received badge | ● Student (source) |
| 2016-08-19 16:32:35 -0500 | asked a question | AMCL Global Localization Upside Down Seems like AMCL does a really bad job of localizing in the map. I'm using the global_localization service to distribute the particles across the map initially, but the results are things like this:
when in fact the robot is staring at a corner like this:
Thoughts on what I'm missing here? Or what I need to look into to improve my results? |
| 2016-08-19 10:40:15 -0500 | answered a question | launch file find with current pkg name If you can set a system-wide environment variable for CURRENT_PKG (might need to put it in ~/.bashrc file), you can swap the $(find current_pkg) part with $(env CURRENT_PKG). |
| 2016-08-17 09:34:17 -0500 | received badge | ● Famous Question (source) |
| 2016-08-17 09:14:22 -0500 | received badge | ● Notable Question (source) |
| 2016-08-12 11:42:20 -0500 | answered a question | While doing the turtlebot navigation tutorial I have made a map but when i try to use that map and alunch amcl_demo.launch my rviz doesn't completely load the map. and the amcl_demo node shows the follwoing error. Maybe it can't get to the map? I think you'd get a different error if it truly couldn't find the map, so if it all works when accessed from another computer, but not on the original one, it could be a permissions issue or some kind of config setting somewhere... Are you setting the map location inside the launch file, or with a command-line argument when you run it? |
| 2016-08-12 11:19:23 -0500 | answered a question | Do I need to edit CMake_Prefix_Path to point turtlebot_navigation at a different version of a package? I was going about this the wrong way. One thing I learned is that my comments in the code (which I wasn't seeing on the screen initially) WERE being published, but I had to add Another thing I learned is that by sourcing the overlay folder, I was adding my custom AMCL to the front of the classpath, and the overlay was being used the whole time. I discovered this by adding a custom message to the class, and then seeing what was published when I ran AMCL via So. To do an overlay:
When the launch file looks for a package in the classpath, it will find your overlay (as long as you 'source' beforehand within the same terminal.) |
| 2016-08-12 11:13:31 -0500 | received badge | ● Popular Question (source) |
| 2016-05-20 16:12:04 -0500 | edited question | Do I need to edit CMake_Prefix_Path to point turtlebot_navigation at a different version of a package? Grasping at straws here - I'm using Indigo and I've made an overlay of the AMCL package. The path to it is in ROS_PACKAGE_PATH, and when I "roscd amcl", it takes me to the overlay directory. So far, so good. One of the dependencies of turtlebot_navigation is AMCL, and I want turtlebot_navigation to start using my overlay for AMCL. Even after "sourcing" my overlay, when I run "roslaunch turtlebot_gazebo amcl_demo.launch", it's evident that I'm hitting the usual location of AMCL (/opt/ros/indigo/share/turtlebot_navigation), and not my overlay with some changes to the code. This has also been verified from the output of: roslaunch-deps -v /opt/ros/indigo/share/turtlebot_navigation/launch/amcl_demo.launch where I see lines such as: turtlebot_navigation [/opt/ros/indigo/share/turtlebot_navigation/launch/amcl_demo.launch] What I've Tried: I've edited the amcl.launch.xml of turtlebot_navigation like so for the part that starts up the AMCL node: <node pkg="$(find amcl)" type="amcl" name="amcl"> hoping that the "$(find amcl)" would pick up whatever it is that "roscd" is picking up that lets it know that AMCL should be found in my overlay folder. This results in the following error: ERROR: cannot launch node of type [/home/ebrenna8/Overlays/src/amcl]: /home/ebrenna8/Overlays/src/ ROS path [0]=/opt/ros/indigo/share/ros ROS path[1]=/home/ebrenna8/Overlays/src ROS path[2]=/opt/ros/indigo/share ROS path[3]=/opt/ros/indigo/stacks which I've looked up and appears to mean that it can't find an executable by that name. *Does anyone have ideas on what I need to do to get turtlebot_navigation to look to my Overlays folder instead of the original? I'm looking at modifying environment variables like CMake_Prefix_Path now. * Let me know if I should provide additional information. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.