The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-11-24 10:50:10 -0500 | received badge | ● Notable Question (source) |
| 2023-10-05 08:08:20 -0500 | received badge | ● Famous Question (source) |
| 2023-06-28 01:15:51 -0500 | marked best answer | cannot convert ‘tf2_ros::TransformListener*’ to ‘tf2_ros::Buffer*’ I am trying to upgrade some existing code that use tf with kinetic to use instead tf2 with noetic. In the following line of code, The function signature for "initialize" is: and the documentation says that In the line of code above, error: cannot convert ‘tf2_ros::TransformListener’ to ‘tf2_ros::Buffer’ I am very confused. How should one pass in a tf2_ros::TransformListener as a parameter of type tf2_ros::Buffer? The documentation is very confusing. |
| 2023-06-27 07:38:50 -0500 | received badge | ● Popular Question (source) |
| 2023-06-18 17:36:50 -0500 | received badge | ● Notable Question (source) |
| 2023-06-13 22:24:57 -0500 | received badge | ● Popular Question (source) |
| 2023-06-13 16:16:45 -0500 | asked a question | Adding node from within OpaqueFunction in ROS2 Python Launch File Adding node from within OpaqueFunction in ROS2 Python Launch File Is it possible to do something like this def myfunc(c |
| 2023-06-13 09:56:43 -0500 | edited question | Set string value based on boolean argument in ROS2 Python Launch File Set string value based on boolean argument in ROS2 Python Launch File Suppose I have a boolean argument foo def generat |
| 2023-06-13 09:56:00 -0500 | edited question | Set string value based on boolean argument in ROS2 Python Launch File Set string value based on boolean argument in ROS2 Python Launch File Suppose I have a boolean argument foo def generat |
| 2023-06-13 09:55:09 -0500 | asked a question | Set string value based on boolean argument in ROS2 Python Launch File Set string value based on boolean argument in ROS2 Python Launch File Suppose I have a boolean argument foo def generat |
| 2023-06-02 11:42:52 -0500 | received badge | ● Nice Answer (source) |
| 2023-05-25 05:40:33 -0500 | received badge | ● Favorite Question (source) |
| 2023-05-25 05:40:30 -0500 | received badge | ● Famous Question (source) |
| 2023-05-01 17:01:10 -0500 | asked a question | No DepthCloud in RViZ 2 No DepthCloud in RViZ 2 In RViZ 1, there was a "DepthCloud" display type that allows you to configure an RGB image topic |
| 2023-05-01 01:38:32 -0500 | received badge | ● Necromancer (source) |
| 2023-04-27 13:51:30 -0500 | received badge | ● Famous Question (source) |
| 2023-04-26 04:56:34 -0500 | received badge | ● Famous Question (source) |
| 2023-04-26 04:56:34 -0500 | received badge | ● Notable Question (source) |
| 2023-04-19 12:30:11 -0500 | received badge | ● Notable Question (source) |
| 2023-04-19 12:30:11 -0500 | received badge | ● Popular Question (source) |
| 2023-04-17 14:22:00 -0500 | answered a question | Global logger for logging without a node In response to @tnajjar, to do this in Python, use RcutilsLogger under rclpy.impl from rclpy.impl import rcutils_logger |
| 2023-04-13 14:59:44 -0500 | received badge | ● Notable Question (source) |
| 2023-04-07 09:51:09 -0500 | received badge | ● Popular Question (source) |
| 2023-03-31 09:21:38 -0500 | asked a question | Unexpected Node Duplication and Unable to Kill node in ROS2 Unexpected Node Duplication and Unable to Kill node in ROS2 I got a warning that says Publisher already registered for |
| 2023-03-29 18:22:11 -0500 | asked a question | Point Cloud and Depth Image Processing Nodes in ROS2 Point Cloud and Depth Image Processing Nodes in ROS2 With ROS1, it was possible to conveniently process point cloud and |
| 2022-11-30 00:07:41 -0500 | received badge | ● Famous Question (source) |
| 2022-09-11 16:35:25 -0500 | commented answer | Merging point clouds The code from autoware is great! |
| 2022-09-05 13:59:20 -0500 | commented answer | Python ApproximateTimeSynchronizer not working This is in conflict with this post here that says you can subscribe to the same topic multiple times within one node: ht |
| 2022-09-05 12:22:56 -0500 | commented answer | Python ApproximateTimeSynchronizer not working This post here says you can subscribe to the same topic multiple times within one node: https://answers.ros.org/question |
| 2022-08-10 11:33:41 -0500 | commented answer | Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS bug? Thanks Mike. I had thought about that actually. But how come import mytest.msg works within hey.py in mytest? The sys.pa |
| 2022-08-10 11:28:06 -0500 | received badge | ● Popular Question (source) |
| 2022-08-10 08:05:39 -0500 | received badge | ● Notable Question (source) |
| 2022-08-10 08:05:39 -0500 | received badge | ● Popular Question (source) |
| 2022-08-09 22:30:01 -0500 | edited question | Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS bug? Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS |
| 2022-08-09 22:29:36 -0500 | edited question | Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS bug? Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS |
| 2022-08-09 22:29:10 -0500 | edited question | Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS bug? Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS |
| 2022-08-09 22:25:27 -0500 | edited question | Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS bug? Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS |
| 2022-08-09 22:22:32 -0500 | asked a question | Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS bug? Strange <package>.msg import behavior: "ModuleNotFoundError: No module named '<package>.msg'" Is this a ROS |
| 2022-07-17 08:28:04 -0500 | received badge | ● Popular Question (source) |
| 2022-03-08 21:17:55 -0500 | commented answer | Set delay between starting nodes within launch file Is there a way to delay launching the part in "<include>"? |
| 2022-03-08 21:00:55 -0500 | received badge | ● Notable Question (source) |
| 2022-02-26 23:03:11 -0500 | received badge | ● Necromancer (source) |
| 2022-02-08 19:22:35 -0500 | answered a question | How to install tf2_geometry_msgs dependency PyKDL? Here is a work around. I found that I could install PyKDL by sudo apt install python3-pykdl This installs a library to |
| 2022-02-08 18:37:17 -0500 | commented answer | How to install tf2_geometry_msgs dependency PyKDL? I am getting "error: static assertion failed: The number of argument annotations does not match the number of function a |
| 2022-01-26 02:47:44 -0500 | received badge | ● Popular Question (source) |
| 2022-01-25 17:21:44 -0500 | received badge | ● Self-Learner (source) |
| 2022-01-25 17:21:44 -0500 | received badge | ● Teacher (source) |
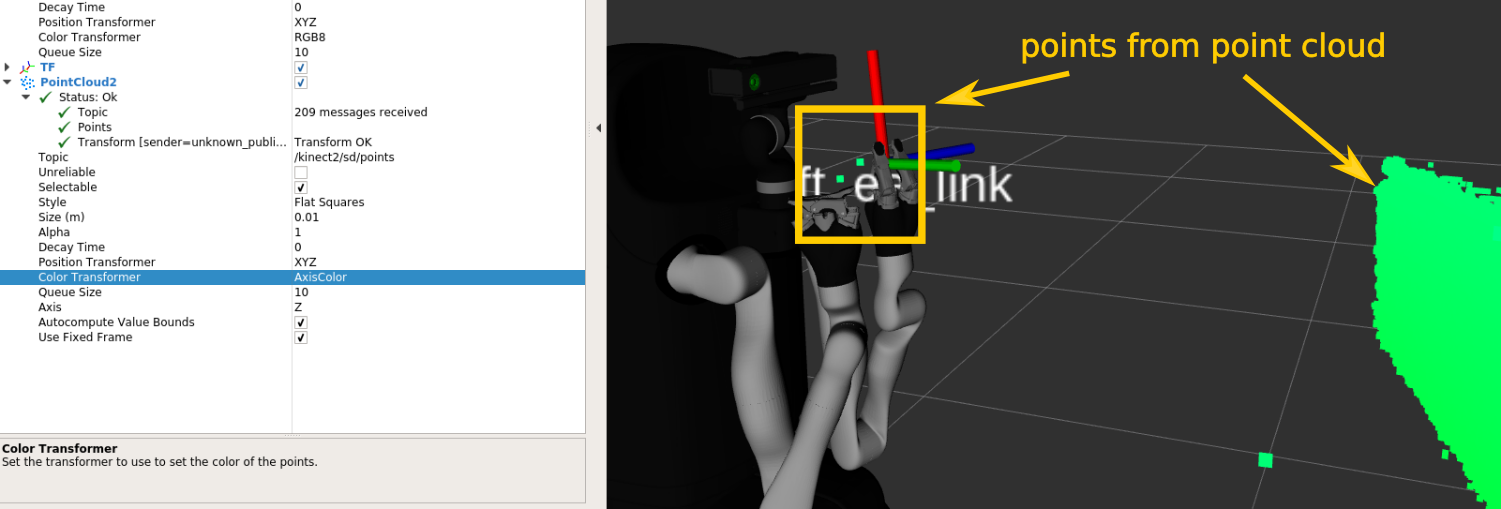
| 2022-01-25 16:45:24 -0500 | marked best answer | Noisy points from point cloud causes Moveit! to fail As shown in the screenshot below, some of the points (green) from the Kinect2 camera point cloud (
These points overlap with the gripper, and causes Moveit! to keep output the following message: and the plan was in state ABORTED. When I turn off the OctoMap layer for Moveit!, the arm can execute the motion plan smoothly. How can I either remove these noisy points or tell Moveit! to not worry about these points? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.