The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-06-24 10:09:02 -0500 | received badge | ● Nice Question (source) |
| 2021-03-17 06:07:52 -0500 | received badge | ● Nice Answer (source) |
| 2021-02-25 02:50:46 -0500 | edited answer | rosbag tools for bag operation So the hopefully ever-growing list to work with bag files is as follows: Native rosbag http://wiki.ros.org/rosbag htt |
| 2021-02-25 02:48:48 -0500 | edited answer | rosbag tools for bag operation So the hopefully ever-growing list to work with bag files is as follows: Native rosbag http://wiki.ros.org/rosbag htt |
| 2021-02-25 02:48:22 -0500 | edited answer | rosbag tools for bag operation So the hopefully ever-growing list to work with bag files is as follows: Native rosbag http://wiki.ros.org/rosbag htt |
| 2019-12-03 18:20:57 -0500 | received badge | ● Great Answer (source) |
| 2019-09-16 10:11:45 -0500 | received badge | ● Guru (source) |
| 2019-09-16 10:11:45 -0500 | received badge | ● Great Answer (source) |
| 2019-08-19 13:34:43 -0500 | edited answer | rosbag tools for bag operation So the hopefully ever-growing list to work with bag files is as follows: Native rosbag http://wiki.ros.org/rosbag htt |
| 2019-08-19 10:04:31 -0500 | commented answer | frame transformation (camera to base) in python In the c++ API it is in fact defined as set_reference_frame but in the python API it is called set_pose_reference_frame. |
| 2019-07-18 05:50:14 -0500 | edited answer | rosbag tools for bag operation So the hopefully ever-growing list to work with bag files is as follows: Native rosbag http://wiki.ros.org/rosbag htt |
| 2019-05-09 01:58:29 -0500 | received badge | ● Good Answer (source) |
| 2019-05-01 09:19:38 -0500 | marked best answer | rosbag tools for bag operation I recently started to work exhaustively with rosbag. Also started with extracting videos out of it and also start writing my own tools for timestamp manipulation (which was a nice exercise btw). But then I found that there already exist tools for all these task. Before I start writing more tools for bag operations, I'd like to ask what other repositories/packages/tools exist. Edit: I put the (hopefully ever-growing list) into an answer, so that this question gets more attention Please send more suggestions! |
| 2019-05-01 09:19:38 -0500 | received badge | ● Good Answer (source) |
| 2019-05-01 09:19:38 -0500 | received badge | ● Enlightened (source) |
| 2019-04-08 23:21:14 -0500 | received badge | ● Famous Question (source) |
| 2019-03-05 07:40:32 -0500 | received badge | ● Notable Question (source) |
| 2019-02-28 09:52:28 -0500 | received badge | ● Nice Answer (source) |
| 2019-01-17 04:03:50 -0500 | received badge | ● Famous Question (source) |
| 2018-12-11 15:03:50 -0500 | received badge | ● Necromancer (source) |
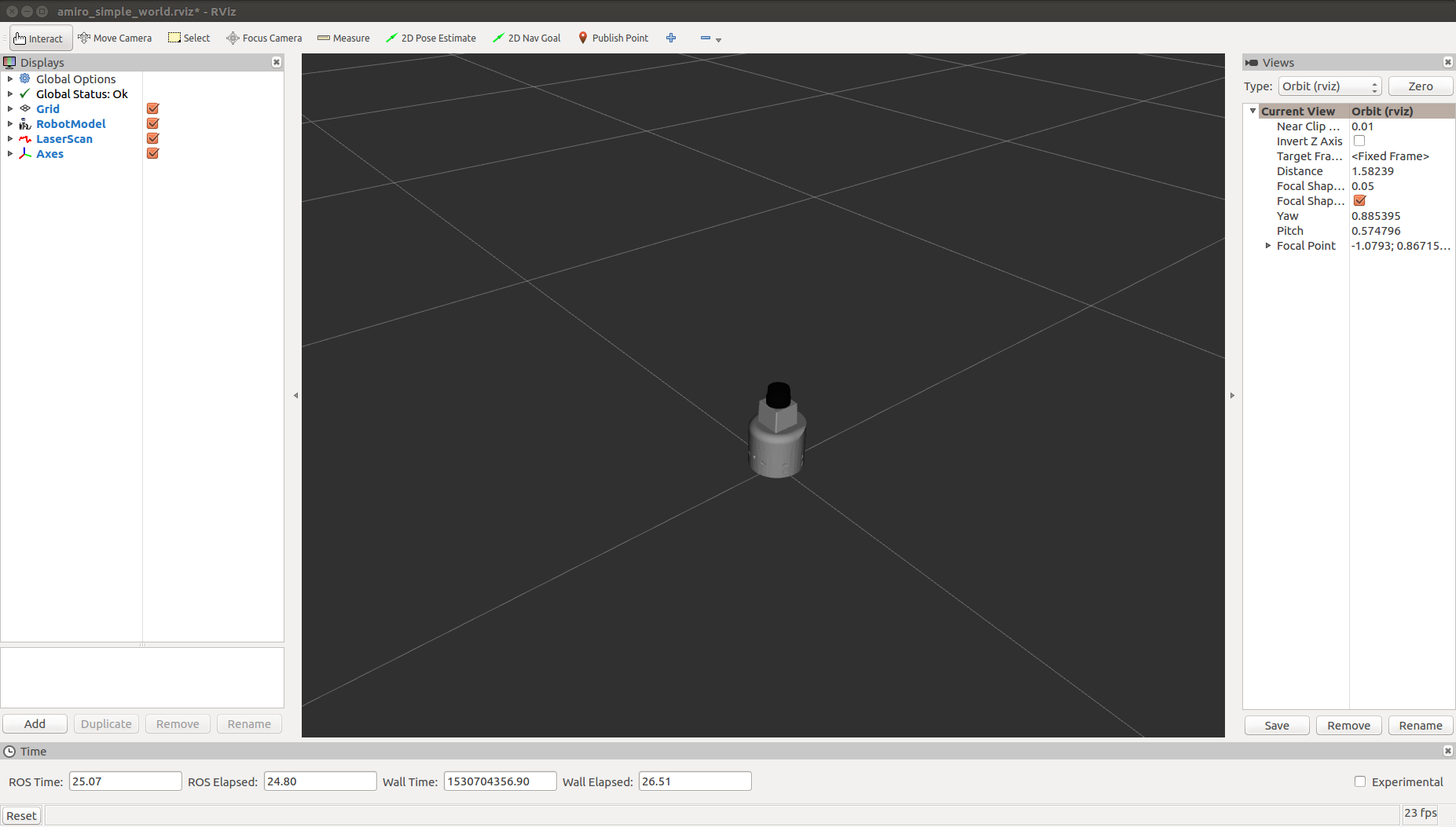
| 2018-08-28 06:02:34 -0500 | marked best answer | robot model does not appear in rviz melodic I try to bring my robot model (which I have developed for kinetic) to work under melodic. Everything works so far (despite some plugin issues where I have already committed a pull request), but not the visualization of the robot model. The xacro description of the robot is here. rviz visualization under melodic:
rviz visualization under kinetic:
Here are some points which I have investigated already:
If one would like to test it, follow these steps:
Can anyone help me with this issue? |
| 2018-08-28 06:02:33 -0500 | commented answer | robot model does not appear in rviz melodic Setting this variable solved the issue indeed, thanks. |
| 2018-08-28 06:00:19 -0500 | received badge | ● Famous Question (source) |
| 2018-08-06 14:58:05 -0500 | received badge | ● Popular Question (source) |
| 2018-07-25 14:50:08 -0500 | received badge | ● Notable Question (source) |
| 2018-07-17 09:57:04 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.