The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-12-10 17:25:35 -0500 | received badge | ● Famous Question (source) |
| 2018-08-18 06:23:22 -0500 | received badge | ● Notable Question (source) |
| 2018-06-29 01:17:49 -0500 | received badge | ● Popular Question (source) |
| 2018-05-11 15:56:20 -0500 | asked a question | using multiple hardware interfaces (kuka tool) using multiple hardware interfaces (kuka tool) Hello everybody, I'm currently trying to connect two "robots". First I u |
| 2018-01-31 09:05:39 -0500 | received badge | ● Famous Question (source) |
| 2018-01-31 09:05:39 -0500 | received badge | ● Notable Question (source) |
| 2017-10-15 19:55:25 -0500 | received badge | ● Popular Question (source) |
| 2017-09-05 10:40:43 -0500 | asked a question | pcl cuda cuda_runtime.h no such file or directory with ros pcl cuda cuda_runtime.h no such file or directory with ros Hello everybody. I'm trying to use cuda in my pcl/ros applic |
| 2017-08-25 00:34:42 -0500 | received badge | ● Nice Question (source) |
| 2017-07-12 01:51:22 -0500 | received badge | ● Enthusiast |
| 2016-11-10 11:43:12 -0500 | received badge | ● Famous Question (source) |
| 2016-08-18 03:54:51 -0500 | commented answer | RGBDSLAM v2 waiting for ... Hey, yes I'm starting it externally and on the hw_registered topic is data. Futhermore I have solved the problem. I created a relay from /xtion/rgb/camera_info to /camera/rgb/camera_info. |
| 2016-08-18 03:41:45 -0500 | received badge | ● Notable Question (source) |
| 2016-08-17 10:47:08 -0500 | received badge | ● Popular Question (source) |
| 2016-08-15 15:19:40 -0500 | asked a question | RGBDSLAM v2 waiting for ... Hello guys, i'm currently testing some RGBD algorithms, but when i use RGBDSLAM v2 i cant get any input data (Waiting for visual image on topic /xtion/rgb/image_rect_color and waiting for depth image on topic /xtion/depth_registered/hw_registered/image_rect_raw) On this two topics is data. Rtabmap working without any problem. Here is my launch file:
Im using Ros Indigo (Ubuntu 14.04) with an asus xtion camera. What i'm doing wrong ? :/ greets tobi |
| 2016-06-15 13:33:16 -0500 | received badge | ● Famous Question (source) |
| 2016-04-27 02:34:19 -0500 | received badge | ● Notable Question (source) |
| 2016-04-22 09:00:05 -0500 | commented question | clear_costmap_recovery is not clearing the map I have the same issue (as describe here) Did you find a solution for the problem? |
| 2016-04-22 08:38:18 -0500 | commented answer | costmap not cleared after executing all recovery behaviors hey, i tried the aggressive_reset, but it's like you said. It doesn't cleared the obstacle. After calling the clear_costmap service every obstacle is now cleared from the costmap. The problem is, that the robot plans now a new trajectories through walls, because the walls will be cleared, too. |
| 2016-04-22 08:32:36 -0500 | received badge | ● Supporter (source) |
| 2016-04-22 02:51:18 -0500 | received badge | ● Popular Question (source) |
| 2016-04-21 11:03:36 -0500 | received badge | ● Student (source) |
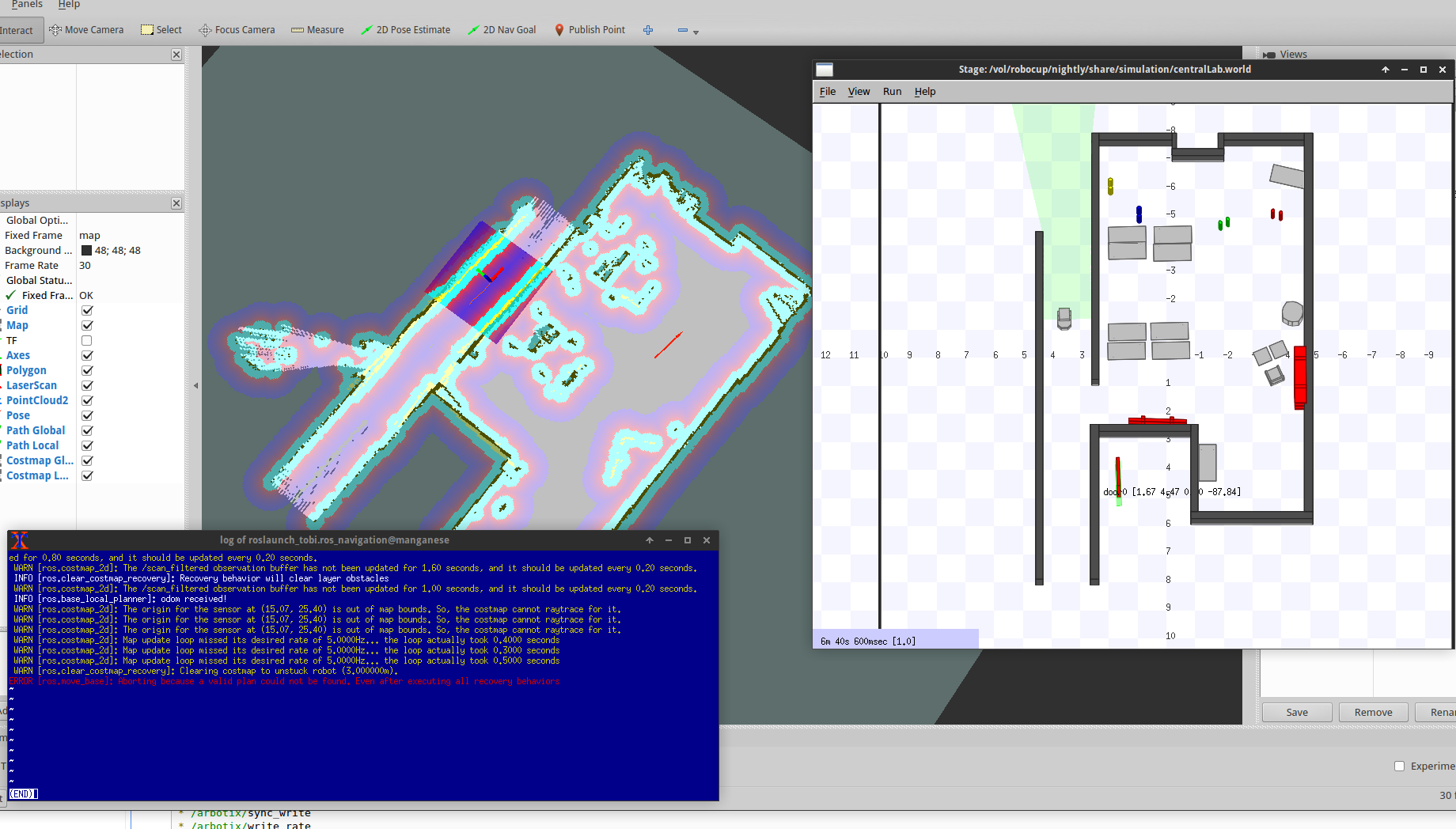
| 2016-04-21 11:03:15 -0500 | asked a question | costmap not cleared after executing all recovery behaviors Hi everyone, i have a problem with clearing my costmap. First the robot is seeing an obstacle (for example a door, which will be closed infront of him) and then the robot is driving out of distance of the obstacle, but if the robot wants to reenter the room with the closed door opened again it can't plan a new way. Even after executing all recovery behaviors. Here is a screenshot of my problem:
thank you in advance for your help. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.