The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-05-29 04:18:16 -0500 | received badge | ● Famous Question (source) |
| 2020-12-09 00:33:31 -0500 | received badge | ● Popular Question (source) |
| 2020-08-31 05:33:03 -0500 | asked a question | global_planner eventually creates paths over obstacles when calling /GlobalPlanner/make_plan global_planner eventually creates paths over obstacles when calling /GlobalPlanner/make_plan Hi all! I'm using Gmapping |
| 2020-07-08 20:13:37 -0500 | received badge | ● Famous Question (source) |
| 2020-06-04 14:28:15 -0500 | received badge | ● Notable Question (source) |
| 2020-06-04 03:23:39 -0500 | commented answer | hector_slam/gmapping with T265 (odometry) and RPLidar apparently, it does ;) |
| 2020-06-04 02:51:19 -0500 | received badge | ● Supporter (source) |
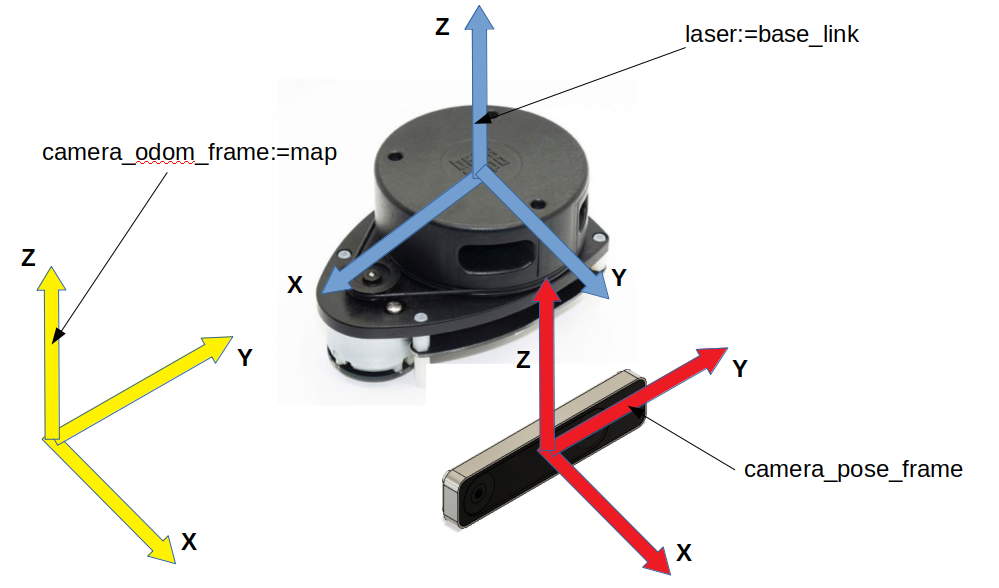
| 2020-06-04 02:51:18 -0500 | marked best answer | hector_slam/gmapping with T265 (odometry) and RPLidar Hello everybody I am trying to make SLAM using a 2D laser scanner (RPLidar A1) supporting it with a Realsense camera T265, which provides an accurate odometry. The arrangement of both devices is as follows:
The realsense ROS package provides two main frames: camera_odom_frame and camera_pose_frame. This last one is the one that moves around when the camera moves through the space. This is the tf tree created by the camera package:
I have tried to use these two devices with two SLAM packages: hector_slam and gmapping. hector_slam This package works well when carrying out SLAM without odometry. My problem comes when I try to include the odometry information. After launching the LIDAR and the camera packages, I launch hector_slam using the following launch file: Note the tf nodes launched at the end of the file. This launcher throws this error: |
| 2020-06-04 02:51:18 -0500 | received badge | ● Scholar (source) |
| 2020-06-04 02:50:55 -0500 | answered a question | hector_slam/gmapping with T265 (odometry) and RPLidar Thank you very much for the answer. As you suggest, replacing base_link by camera_pose_frame makes it work. Additional |
| 2020-06-04 02:50:55 -0500 | received badge | ● Rapid Responder (source) |
| 2020-06-03 13:42:46 -0500 | received badge | ● Popular Question (source) |
| 2020-06-03 11:32:41 -0500 | commented question | hector_slam/gmapping with T265 (odometry) and RPLidar Great, thanks! |
| 2020-06-03 11:32:21 -0500 | edited question | hector_slam/gmapping with T265 (odometry) and RPLidar hector_slam/gmapping with T265 (odometry) and RPLidar Hello everybody I am trying to make SLAM using a 2D laser scanner |
| 2020-06-03 11:02:49 -0500 | received badge | ● Student (source) |
| 2020-06-03 08:03:32 -0500 | asked a question | hector_slam/gmapping with T265 (odometry) and RPLidar hector_slam/gmapping with T265 (odometry) and RPLidar Hello everybody I am trying to make SLAM using a 2D laser scanner |
| 2020-01-13 14:13:53 -0500 | received badge | ● Notable Question (source) |
| 2020-01-13 14:13:53 -0500 | received badge | ● Popular Question (source) |
| 2019-10-19 08:34:03 -0500 | asked a question | bebop_autonomy on Raspberry Pi 3 (Raspian-stretch), parrot_arsdk won't compile bebop_autonomy on Raspberry Pi 3 (Raspian-stretch), parrot_arsdk won't compile Hello there! I'm trying to run bebop_aut |
| 2019-10-19 08:26:54 -0500 | asked a question | bebop_autonomy with from-source-compiled parrot_arsdk in Raspberry Pi 3 bebop_autonomy with from-source-compiled parrot_arsdk in Raspberry Pi 3 Hello there! I'm trying to run bebop_autonomy o |
| 2017-01-18 09:54:38 -0500 | received badge | ● Famous Question (source) |
| 2016-05-16 16:54:44 -0500 | received badge | ● Notable Question (source) |
| 2016-05-07 02:40:52 -0500 | received badge | ● Enthusiast |
| 2016-05-03 10:15:45 -0500 | received badge | ● Notable Question (source) |
| 2016-05-03 06:52:10 -0500 | answered a question | Class member with subscriptor does not update Hello Ahendrix Thank you very much for your answer. The code above actually works. The problem was in another part of the code: the topic /topic_B was not actually being published continuously. That is why B_member.x was not updated. |
| 2016-04-30 10:20:20 -0500 | received badge | ● Popular Question (source) |
| 2016-04-29 12:28:16 -0500 | asked a question | Class member with subscriptor does not update Hi everybody! I'm having some problems with a simple program. There is a main class A, which uses a second class B. Both of them are subscribed to different topics. I simplified both of them: I hope I did not make any mistakes in this code; anyway my code is similar and compiles without any problem. The thing is that B_member.x does not update! Its value is always the same! What am I doing wrong? I know one solution would be to merge A and B in the same class, but I would like to understand how ROS works... Thank you very much in advance!! |
| 2016-04-19 11:46:05 -0500 | received badge | ● Popular Question (source) |
| 2016-04-19 09:44:23 -0500 | answered a question | ROS_MASTER_URI not taken, ubuntu hostname taken instead Ok, I fixed it! I was executing the publisher in the Raspberry as super user (because one of the libraries I use needs it). Then, editing the .bashrc under super user, fixed the problem. |
| 2016-04-19 09:34:41 -0500 | commented question | ROS_MASTER_URI not taken, ubuntu hostname taken instead Thanks for your comment! Yes, I added them to both .bashrc. To be sure, I also run echo $ROS_HOSTNAME, and both were right (raspberrypi1 and pablo). |
| 2016-04-19 06:53:41 -0500 | asked a question | ROS_MASTER_URI not taken, ubuntu hostname taken instead Hi everybody, I'm running ROS in two machines, in my laptop and in a Raspberry Pi. I'm connecting them through an Ethernet cable. I configured the hostnames in both of them (/etc/hosts): Laptop: Raspberry pi: With this configuration, I can ping between them without problem, i.e. ping raspberrypi1 at my laptop, and ping pablo at the Raspberry Pi. Also, I use: At my laptop: At the Raspberry Pi: So I want my laptop to be the master, and the Raspberry to be the slave and send messages to my laptop. Well I ran roscore at my laptop, and I see: It's taking ROS_MASTER_URI=http://pablo-Aspire-V5-573G:11311/ , but not ROS_MASTER_URI=http://pablo:11311/ as I was expecting! Actually pablo-Aspire-V5-573G is the hostname of my computer in Ubuntu, and ROS takes this one, instead of the one a gave him (pablo). When I run a publisher at the Raspberry Pi, I get: I could fix it just changing everywhere pablo by pablo-Aspire-V5-573G, but still I wonder why it is not working. Any ideas? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.