The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-02-23 13:41:41 -0500 | received badge | ● Notable Question (source) |
| 2023-02-23 13:41:41 -0500 | received badge | ● Famous Question (source) |
| 2020-11-04 11:39:32 -0500 | received badge | ● Famous Question (source) |
| 2020-01-27 05:11:01 -0500 | received badge | ● Famous Question (source) |
| 2019-06-04 18:22:57 -0500 | received badge | ● Taxonomist |
| 2018-09-19 17:20:36 -0500 | marked best answer | creating and building new package like hector_slam Hello, I need to modify hector-slam (odom_frame and base_frame) for my situation which is i dont have a robot system i only have lms100 laser scanner. so i know i should create a new package includes hector_slam and modify inside. I looked and tried before: the create/build a package tutorials. But now i'm a bit confused when it comes to create a new hector_slam package. It includes so many dependencies, different folders like hector_slam_launch, hector_mapping. should i follow the create/build package tutorials one by one? in catkin_ws when create a package, the name of it should be the same with hector_slam or not? and when i run catkin_create_pkg command, should i write 12 dependencies after that command (which i looked dependecies in http://wiki.ros.org/hector_slam ) what is the proper way to follow? or is there another (much easier) way to do that? Like can i use roscp command for copying the files in a new folder and modify them? Sorry I have a lot of questions in my mind, i hope i can explain myself properly Thanks, Basak |
| 2018-09-19 14:34:00 -0500 | marked best answer | is there a way for object detection or recognition with 2d laser scanner ? Hello, I have lms100 laser scanner and i want to do any kind of object or obstacle detection/recognition. Is there anyway to do that with help of ROS? By the way, currently I can create map with hector_slam with LMS100. edit: i think costmap can show obstacles. but i'm not sure, it can apply to my situtation (having only laser scanner not a robot system) Thanks, Basak |
| 2018-02-27 18:40:43 -0500 | received badge | ● Famous Question (source) |
| 2018-02-27 18:40:43 -0500 | received badge | ● Notable Question (source) |
| 2017-08-09 06:32:13 -0500 | received badge | ● Famous Question (source) |
| 2017-04-12 20:08:34 -0500 | received badge | ● Famous Question (source) |
| 2017-04-12 15:10:10 -0500 | received badge | ● Famous Question (source) |
| 2017-03-29 19:02:56 -0500 | received badge | ● Famous Question (source) |
| 2017-03-11 21:29:09 -0500 | received badge | ● Student (source) |
| 2017-02-08 08:09:02 -0500 | received badge | ● Famous Question (source) |
| 2017-02-06 07:27:17 -0500 | received badge | ● Notable Question (source) |
| 2017-02-02 19:48:55 -0500 | received badge | ● Famous Question (source) |
| 2017-01-21 04:52:39 -0500 | received badge | ● Popular Question (source) |
| 2016-12-20 20:40:44 -0500 | received badge | ● Popular Question (source) |
| 2016-12-20 20:40:44 -0500 | received badge | ● Notable Question (source) |
| 2016-10-28 08:01:39 -0500 | received badge | ● Famous Question (source) |
| 2016-10-24 10:37:09 -0500 | received badge | ● Famous Question (source) |
| 2016-10-24 09:28:59 -0500 | received badge | ● Notable Question (source) |
| 2016-10-11 22:05:27 -0500 | marked best answer | catkin_create_pkg or roscreate-pkg? Hello, I need to modify hector_slam for my situation. So i learned that i need to create/build a new package. So i want to create just like existing hector_slam package and modify it like i want. For creating new hector_slam package to modify, which one is suitable and easier for my situation. catkin package ( http://wiki.ros.org/ROS/Tutorials/Cre... ) or ros package ( http://wiki.ros.org/roscreate ) ? Thanks, Basak |
| 2016-10-11 22:05:11 -0500 | received badge | ● Famous Question (source) |
| 2016-10-09 07:16:31 -0500 | received badge | ● Famous Question (source) |
| 2016-09-28 02:11:14 -0500 | received badge | ● Famous Question (source) |
| 2016-09-18 14:40:45 -0500 | received badge | ● Notable Question (source) |
| 2016-07-26 12:19:19 -0500 | received badge | ● Famous Question (source) |
| 2016-07-20 16:56:01 -0500 | received badge | ● Popular Question (source) |
| 2016-07-19 16:30:37 -0500 | received badge | ● Notable Question (source) |
| 2016-07-12 13:16:06 -0500 | received badge | ● Famous Question (source) |
| 2016-07-01 16:12:21 -0500 | marked best answer | visualizing obstacles in rviz (Gridcells vs map element) hello, I am trying to show obstacles / objects in rviz. i'm using costmap_2d for that in the video of Using rviz with the Navigation Stack tutorial obstacles can be shown by using GridCells element in rivz (nav_msgs/GridCells). But in the costmap_2d page and in the published topics there is only /grid (nav_msgs/OccupancyGrid). so i should use map element in rviz to see obstacles (/costmap topic) since both of them are related obstacles why the both pages implicate different things? And how can i publish /obstacles topic to choose GRIDCELL display just like the video??? i tried to do plugins but again there's only /costmap topic for me to use. |
| 2016-07-01 14:54:59 -0500 | received badge | ● Popular Question (source) |
| 2016-06-30 14:39:43 -0500 | received badge | ● Popular Question (source) |
| 2016-06-30 10:26:02 -0500 | commented answer | gmapping doesnt update the map on occasion for mapping i prefer hector_slam too, i dont have odometry (or robot system :) but i want to see obstacles in costmap and i didnt manage to static map&amcl&costmap thing so till solving that, i'm doing laser scan matcher&gmapping&costmap, but in gmapping there is this problem too :/ |
| 2016-06-30 09:47:02 -0500 | commented answer | gmapping doesnt update the map on occasion that sounds reasonable, but in hector_slam i didnt have this probem, maybe it's because their algoritm are different right? |
| 2016-06-30 07:27:11 -0500 | asked a question | gmapping doesnt update the map on occasion hello, i'm using lms100 and gmapping with laser scan matcher to build map. in a narrow but long corridor, while i was going straight i notice that (thanks to LaserScan in rviz) map isnt updating. the built map should be so much longer but it didnt happen. in a normal room there wasnt any problem. |
| 2016-06-30 06:03:37 -0500 | received badge | ● Notable Question (source) |
| 2016-06-30 05:54:09 -0500 | commented answer | amcl dont do the localization job and results in unmatching maps i updated question with base_local_planner_params.yaml but since i dont have a robot, didnt modify just use the defaults. I dont need to use planner after move_base, just want to manage to see local and global costmaps succesfully with a given static map |
| 2016-06-30 05:49:28 -0500 | commented answer | amcl dont do the localization job and results in unmatching maps i removed expected rate and that warning is gone. main problem is still exist. why do you think odom isnt right? this configuration is ok with gmapping&costmap so i didnt change it. |
| 2016-06-30 04:36:03 -0500 | commented answer | amcl dont do the localization job and results in unmatching maps but that |
| 2016-06-30 04:24:31 -0500 | received badge | ● Popular Question (source) |
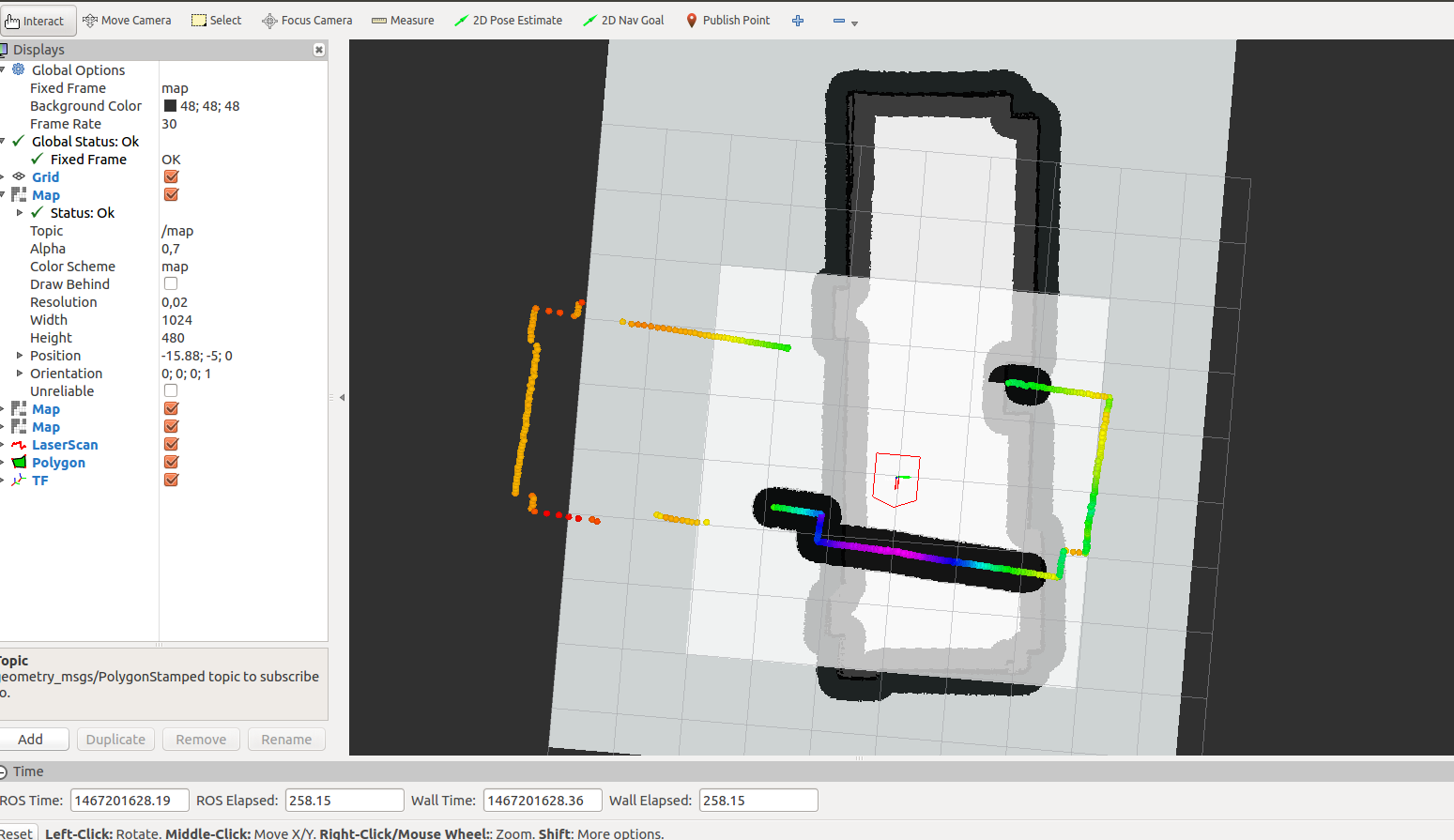
| 2016-06-30 04:21:27 -0500 | edited question | amcl dont do the localization job and results in unmatching maps hello, I'm using lms100 only, when i use gmapping+laser scan matcher and costmap at the same time it was ok, but then i tried the other option; static map(which i built via gmapping before), map_server and amcl (again with laser scan matcher for odometry) can't manage it. it looks like amcl didn't do its job. i don't have a robot system so i don't know which amcl (diff or omni) should i choose or if that even affects the functionality of amcl. in rviz, it looks like this.
my launch file: costmap_common_params.yaml: |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.