The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-08-07 12:13:47 -0500 | marked best answer | Robot localization with AMCL and EKF Hello, I have been following an example here with jackal. My goal so far was to understand how AMCL works. However, in his example he uses ekf_localization and AMCL is just a tool to output cloud with the current robot's position. Here is a rqt_graph when I ran the localization example (which is running gazebo, amcl and rviz) . I thought that AMCL was a separate algorithm for localization and it did not need anything else. What am I missing? Why they are using both EKF and AMCL? Screenshot of rqt_graph: http://tinyurl.com/z73k3nj |
| 2021-07-30 00:19:28 -0500 | received badge | ● Good Question (source) |
| 2021-02-23 06:08:35 -0500 | marked best answer | Why AMCL requires to subscribe to /initialpose topic? AMCL is supposed to solve global localization problem, which means that the robot doesnt know its initial pose. I found this answer in this forum, but I did not understand it. Does it mean that I am providing it initial pose if its subscribing to it? EDIT Alright, so apparently it is a violation of global localization problem. Thank you, Martin. How does one avoid giving initial pose? I need to solve a global localization problem but this is cheating now if I say I use AMCL and provide everything robot needs. |
| 2020-12-27 07:48:54 -0500 | received badge | ● Favorite Question (source) |
| 2020-12-14 21:00:24 -0500 | received badge | ● Nice Question (source) |
| 2019-11-11 02:33:19 -0500 | received badge | ● Famous Question (source) |
| 2019-09-09 03:54:23 -0500 | received badge | ● Notable Question (source) |
| 2019-09-09 03:54:23 -0500 | received badge | ● Famous Question (source) |
| 2019-08-19 05:14:11 -0500 | received badge | ● Popular Question (source) |
| 2019-07-19 02:53:25 -0500 | received badge | ● Notable Question (source) |
| 2019-07-08 10:27:07 -0500 | received badge | ● Famous Question (source) |
| 2019-05-23 21:12:02 -0500 | received badge | ● Famous Question (source) |
| 2019-05-23 21:12:02 -0500 | received badge | ● Notable Question (source) |
| 2019-04-29 01:39:21 -0500 | received badge | ● Notable Question (source) |
| 2019-03-20 10:54:24 -0500 | asked a question | UWSim /g500/pose doesn't echo anything UWSim /g500/pose doesn't echo anything Hello, I want to compare my algorithm's tx ty tz qx qy qz qw to the groundtruth |
| 2019-03-20 10:12:39 -0500 | commented question | the message of the topic '/g500/pose' and '/uwsim/girona500_odom' is not correct When I run $ rostopic echo /g500/pose I dont receive any messages. |
| 2019-03-20 09:24:48 -0500 | received badge | ● Popular Question (source) |
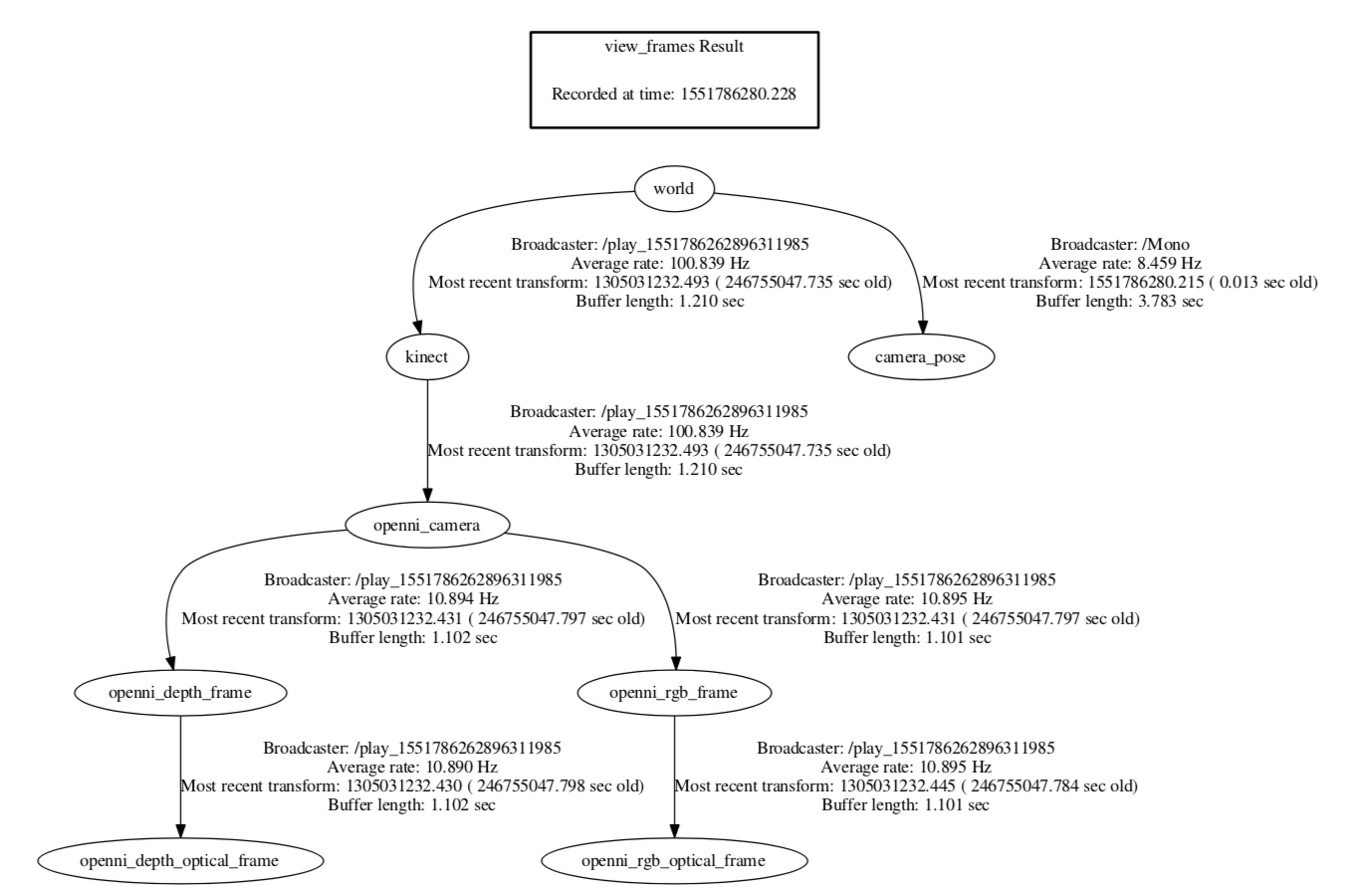
| 2019-03-14 08:12:07 -0500 | marked best answer | /tf sends messages at different timestamp I have a /tf message that seems to send messages at different timestamps. I added comments "// Look here" to highlight the stamps in secs and Im mostly intrigued by the one with the comment "// Look here !!" as the time stamp in secs has absolutely different timestamp. However, the next after that one follows the the pattern as the majority.
Why does this happen? |
| 2019-03-14 08:12:02 -0500 | answered a question | /tf sends messages at different timestamp I looked up this answer. Just by setting the use_sim_time alone didnt work in the beginning. I completely stopped the |
| 2019-03-14 07:37:52 -0500 | commented question | /tf sends messages at different timestamp @gvdhoorn, setting up --clock didnt work. I get the same issue. |
| 2019-03-07 05:17:00 -0500 | received badge | ● Notable Question (source) |
| 2019-03-05 08:10:39 -0500 | commented question | /tf sends messages at different timestamp Nope, not using clock. Will check it out. |
| 2019-03-05 06:36:01 -0500 | received badge | ● Popular Question (source) |
| 2019-03-05 05:49:01 -0500 | commented question | /tf sends messages at different timestamp @gvdhoorn, what do you mean by live nodes? @EdwardNur, updated my question with the tree, |
| 2019-03-05 05:48:29 -0500 | edited question | /tf sends messages at different timestamp /tf sends messages at different timestamp I have a /tf message that seems to send messages at different timestamps. I ad |
| 2019-03-05 05:47:05 -0500 | commented question | /tf sends messages at different timestamp @gvdhoorn, what do you mean live nodes? @EdwardNur, updated my question with the tree, |
| 2019-03-05 03:18:22 -0500 | edited question | /tf sends messages at different timestamp /tf sends messages at different timestamp I have a /tf message that seems to send messages at different timestamps. I ad |
| 2019-03-05 03:17:34 -0500 | asked a question | /tf sends messages at different timestamp /tf sends messages at different timestamp I have a /tf message that seems to send messages at different timestamps. I ad |
| 2019-02-27 04:54:54 -0500 | commented question | Transform camera pose to world interpretation https://vision.in.tum.de/rgbd/dataset/freiburg1/rgbd_dataset_freiburg1_rpy-groundtruth.txt This is the ground truth data |
| 2019-02-27 02:57:52 -0500 | received badge | ● Popular Question (source) |
| 2019-02-27 02:17:11 -0500 | commented question | Transform camera pose to world interpretation I looked at the ground truth data of the rosbag that I was trying to get the camera_pose. I see that the ground truth is |
| 2019-02-26 07:25:34 -0500 | commented question | Transform camera pose to world interpretation Do you mean this http://www.optique-ingenieur.org/en/courses/OPI_ang_M04_C01/co/Contenu03.html ? How can I even check if |
| 2019-02-26 07:24:49 -0500 | commented question | Transform camera pose to world interpretation Do you mean this http://www.optique-ingenieur.org/en/courses/OPI_ang_M04_C01/co/Contenu03.html ? |
| 2019-02-26 05:35:16 -0500 | edited question | Transform camera pose to world interpretation Transform camera pose to world interpretation Hello, I read the tutorial on transforms. I followed the step Checking th |
| 2019-02-26 03:30:16 -0500 | edited question | Transform camera pose to world interpretation Transform camera pose to world interpretation Hello, I read the tutorial on transforms. Following step Checking the res |
| 2019-02-26 03:16:55 -0500 | edited question | Transform camera pose to world interpretation Transform camera pose to world interpretation Hello, I read the tutorial on transforms. Following step Checking the res |
| 2019-02-26 03:16:14 -0500 | commented question | Transform camera pose to world interpretation How do I get the pose of the camera in the world frame? |
| 2019-02-26 02:51:15 -0500 | edited question | Transform camera pose to world interpretation Transform camera pose to world interpretation Hello, I read the tutorial on transforms. Following step Checking the res |
| 2019-02-26 02:50:33 -0500 | asked a question | Transform camera pose to world interpretation Transform camera pose to world interpretation Hello, I read the tutorial on transforms. Following step Checking the res |
| 2019-02-25 09:05:23 -0500 | marked best answer | LSD-SLAM virtual camera calibration Hello, I have recorded some actions using $rosbag record within the virtual simulator called UWSim. I am trying right now to make it work with lsd_slam. My camera topic is /g500/camera1 Therefore, I ran lsd_slam as follow: Now of course I am getting a message saying "WAITING for ROS camera calibration!". I have found someone previously asking how to calibrate virtual camera, however the answer was there is no need. Then what kind of calibration data I should send? |
| 2019-02-23 11:47:08 -0500 | received badge | ● Popular Question (source) |
| 2019-02-23 11:23:25 -0500 | commented question | Visualize lsd_slam point cloud with rviz Have you figured it out? |
| 2019-02-22 08:45:44 -0500 | edited answer | LSD-SLAM virtual camera calibration Managed to solve it. I calculated the camera parameters and this is what Ive got (I calculated these by following this |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.