The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-08-10 06:47:12 -0500 | received badge | ● Good Answer (source) |
| 2023-07-15 00:56:27 -0500 | received badge | ● Good Answer (source) |
| 2023-05-01 00:02:05 -0500 | received badge | ● Nice Answer (source) |
| 2023-02-23 10:32:46 -0500 | received badge | ● Good Answer (source) |
| 2023-01-20 14:37:58 -0500 | received badge | ● Nice Answer (source) |
| 2022-12-19 11:50:42 -0500 | received badge | ● Nice Answer (source) |
| 2022-08-26 16:24:21 -0500 | marked best answer | testing launch files in install_space? Hi all, The question I have is actually pretty short:
Let me give you a short rationale of my current thoughts: In ROS, there are three different types of tests you can have (afaik):
IMO, 1. and 2. should be run in the build/devel space, as those test targets and launchfiles should not be installed (even though there are some packages doing this, e.g. gazebo_plugins/test/set_model_state_test, which then does fail as the required test executable is not, and cannot be, installed.) However, for 3. it would be beneficial to check this in the install space as well. This would help to detect missing install tags of executables, launch files and yaml files. How can I achieve this? |
| 2022-06-29 02:58:38 -0500 | marked best answer | When is ${catkin_EXPORTED_TARGETS} needed This is basically a follow-up to #q285772 During my use of ROS, I adopted to call the following line on any (C++) target that I try to build: using This is a constant source of error, as well in the above cited question. Thus, I always adviced People to follow the same strategy. In a comment to the above question, @gvdhoorn described the approach to always use
Checking the documentation (e.g. wiki, catkin docs 1 or catkin docs 2) I'm not quite sure when to use it. The wiki suggest that:
This is basically saying: You Need it always (solution 1). The catkin docs rather say, if you Need any msg/srv/action/dynamic_reconfigure from another catkin package (solution 2). Which is the right way to go? I'd be happy for any insights. |
| 2022-06-22 09:21:01 -0500 | received badge | ● Good Question (source) |
| 2022-06-10 06:13:06 -0500 | received badge | ● Nice Answer (source) |
| 2022-05-23 21:00:43 -0500 | received badge | ● Nice Answer (source) |
| 2022-05-13 07:20:45 -0500 | received badge | ● Nice Answer (source) |
| 2022-04-14 09:44:26 -0500 | received badge | ● Good Answer (source) |
| 2022-03-25 06:18:11 -0500 | received badge | ● Nice Answer (source) |
| 2022-03-01 03:14:18 -0500 | received badge | ● Nice Answer (source) |
| 2022-02-28 03:20:25 -0500 | commented question | E: Unable to locate package ros-noetic-mavros Can you answer the questions in the comments posted above? |
| 2022-02-07 04:30:41 -0500 | received badge | ● Good Answer (source) |
| 2022-01-24 11:25:00 -0500 | received badge | ● Good Answer (source) |
| 2022-01-13 17:59:04 -0500 | received badge | ● Nice Answer (source) |
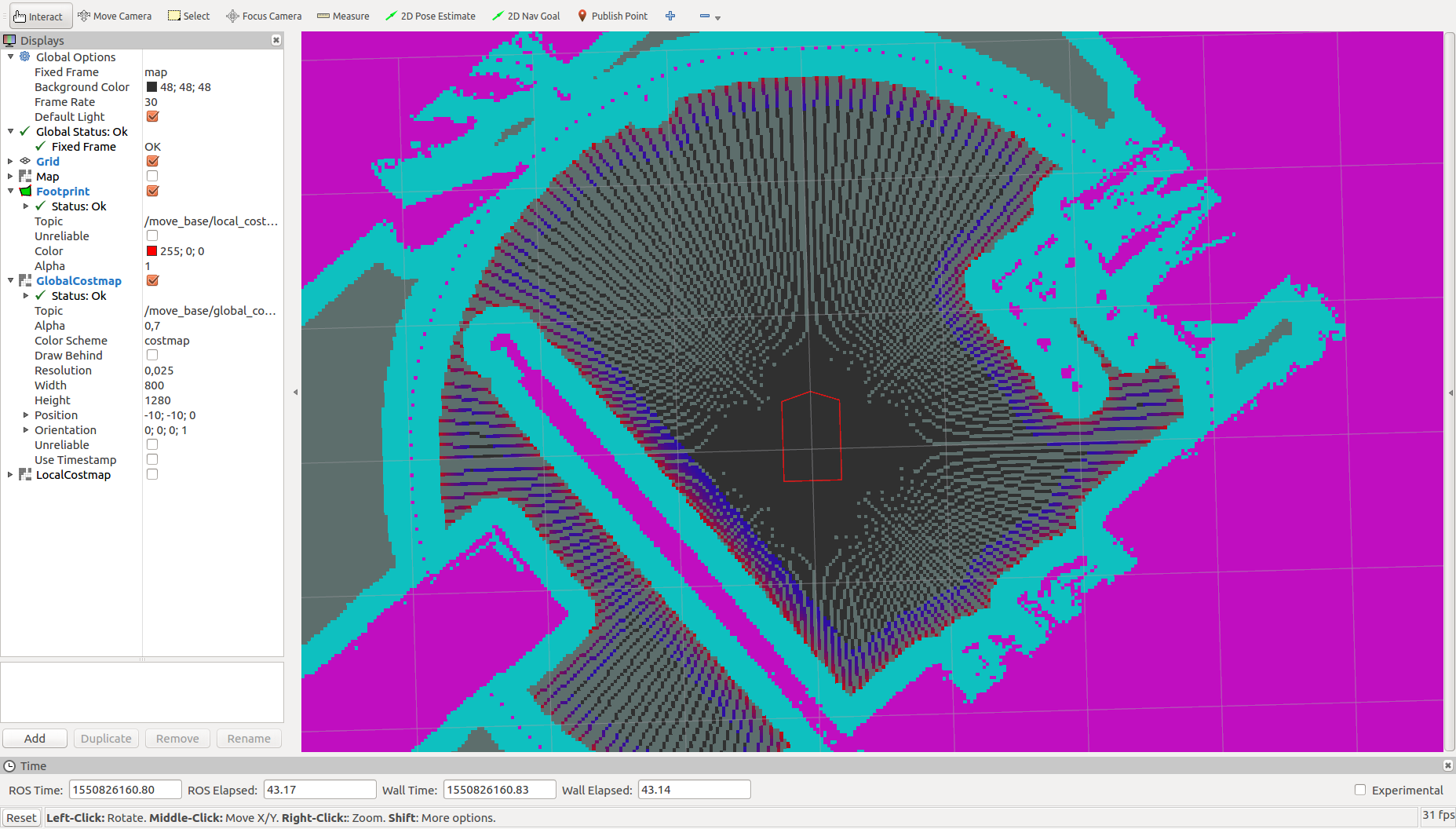
| 2021-12-18 23:43:34 -0500 | marked best answer | static_layer gets deleted by obstacle_layer in global_costmap Previously (i.e. pre-hydro) it has been possible to have a With the current system, I haven't been able to reproduce this behaviour.
Even stranger: as soon as I add an I'm not sure if this is a configuration issue on my end, or if this is really something that is not possible with the layered costmap approach. Even if the "clearing" behaviour is hard to realize, my current system should end up with an "overlay" of the single layers. I.e. the I created a minimal example (see below). This example is stand-alone and doesn't depend on Gazebo or a robot. Any hint to where I have made a mistake would be highly appreciated! Results The trick was really the (Note: I used some fake laser which simply published a circle with radius 3m at 1° angular resolution. Also, the images only show the
Below some pictures of the different combinations: I: Minimal Example Put the following files in your home. You'll need a map to pass to the Play around with using the
|
| 2021-11-18 04:41:55 -0500 | received badge | ● Good Answer (source) |
| 2021-11-15 14:58:12 -0500 | received badge | ● Good Answer (source) |
| 2021-11-03 12:25:16 -0500 | received badge | ● Guru (source) |
| 2021-11-03 12:25:16 -0500 | received badge | ● Great Answer (source) |
| 2021-10-15 03:39:45 -0500 | received badge | ● Good Answer (source) |
| 2021-10-14 11:07:21 -0500 | received badge | ● Good Answer (source) |
| 2021-10-12 02:17:01 -0500 | received badge | ● Nice Answer (source) |
| 2021-09-22 07:04:12 -0500 | received badge | ● Good Answer (source) |
| 2021-08-23 02:50:37 -0500 | commented question | what does it mean like undefined reference? This is a standard C++ error, see also error: ld returned 1 exit status. Basically, you forgot to link to the library de |
| 2021-08-23 02:49:05 -0500 | edited question | what does it mean like undefined reference? what does it mean like undefined reference? straight dump of the console output: srinaath@srinaath-desktop:~/catkin_ws3 |
| 2021-08-20 06:02:31 -0500 | commented answer | Using Publisher inside a Subscriber callback function happens to all of us :-) Please accept the answer by clicking the checkmark next to it, thanks. |
| 2021-08-19 01:02:09 -0500 | edited answer | Using Publisher inside a Subscriber callback function Well, I guess it has to do with trying to advertise using a subscriber :-) It should be subscribe... sub{nh.subscribe( |
| 2021-08-19 01:01:48 -0500 | received badge | ● Rapid Responder (source) |
| 2021-08-19 01:01:48 -0500 | answered a question | Using Publisher inside a Subscriber callback function Well, I guess it has to do with trying to advertise using a subscriber :-) It should be subscribe... ub{nh.advertise&l |
| 2021-08-19 00:58:34 -0500 | commented question | /home/youruser/catkin_ws/src:/opt/ros/kinetic/share bash: /home/youruser/catkin_ws/src:/opt/ros/kinetic/share: No such file or directory It would probably help if you direct us to the installation page where you got this from (link!) and show which commands |
| 2021-08-17 02:47:16 -0500 | edited answer | Questions Regarding ROS Package Dependencies It depends a bit which language you are using (you say "imported" and numpy, so I guess python). If you are using pyth |
| 2021-08-17 02:45:46 -0500 | commented answer | Questions Regarding ROS Package Dependencies see edit above. |
| 2021-08-17 02:45:40 -0500 | edited answer | Questions Regarding ROS Package Dependencies It depends a bit which language you are using (you say "imported" and numpy, so I guess python). If you are using pyth |
| 2021-08-17 00:40:30 -0500 | received badge | ● Rapid Responder (source) |
| 2021-08-17 00:40:30 -0500 | answered a question | Questions Regarding ROS Package Dependencies It depends a bit which language you are using (you say "imported" and numpy, so I guess python). If you are using pyth |
| 2021-08-06 02:16:24 -0500 | commented question | How can I get the src directory of a package in a ROSLaunch file. Funny, on noetic and using rospy / catkin_build I cannot reproduce this. It is pointing to the src directory for me. Wha |
| 2021-08-06 02:15:43 -0500 | commented question | How can I get the src directory of a package in a ROSLaunch file. Funny, on noetic and using rospy / catkin_build I cannot reproduce this. It is pointing to the src directory for me. Wha |
| 2021-08-04 10:24:42 -0500 | commented question | Problem publish and record big data @ssfs have fun :-) If this solves it, please consider to self-answer and accept (or close as answered and correct). Than |
| 2021-08-04 08:19:36 -0500 | commented question | Problem publish and record big data For some background on why the foxy-future branch might solve this issue, spen about an hour of your time to read throug |
| 2021-08-04 08:16:36 -0500 | commented question | GPS and SLAM @Masoum great and thanks for the update. |
| 2021-08-04 01:55:01 -0500 | commented question | How to handle private/personal ros package dependencies Have you looked into the existing Q&As for that? There are quite a lot that talk about this. Though, admittedly, the |
| 2021-08-04 01:46:32 -0500 | edited question | doosan robot [pid 7321, exit code 1, cmd /home/kim/catkin_ws/src/doosan-robot/common/bin/DRCF/run_drcf.sh 12345 m0609 __name:=drcf __log:=/home/kim/.ros/log/0d93ac3e-f4c9-11eb-9f98-40b076dd2030/dsr01-drcf-3.log ] error Hi I have an error right now, please solve this error version ubuntu 18.04 ros melodic Hello. I am trying to run Doos |
| 2021-08-04 01:45:58 -0500 | commented question | GPS and SLAM This question #q383764 by the same user seems to give some background. @Masoum I suggest you merge the two questions and |
| 2021-07-30 09:12:36 -0500 | received badge | ● Nice Answer (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
 II:
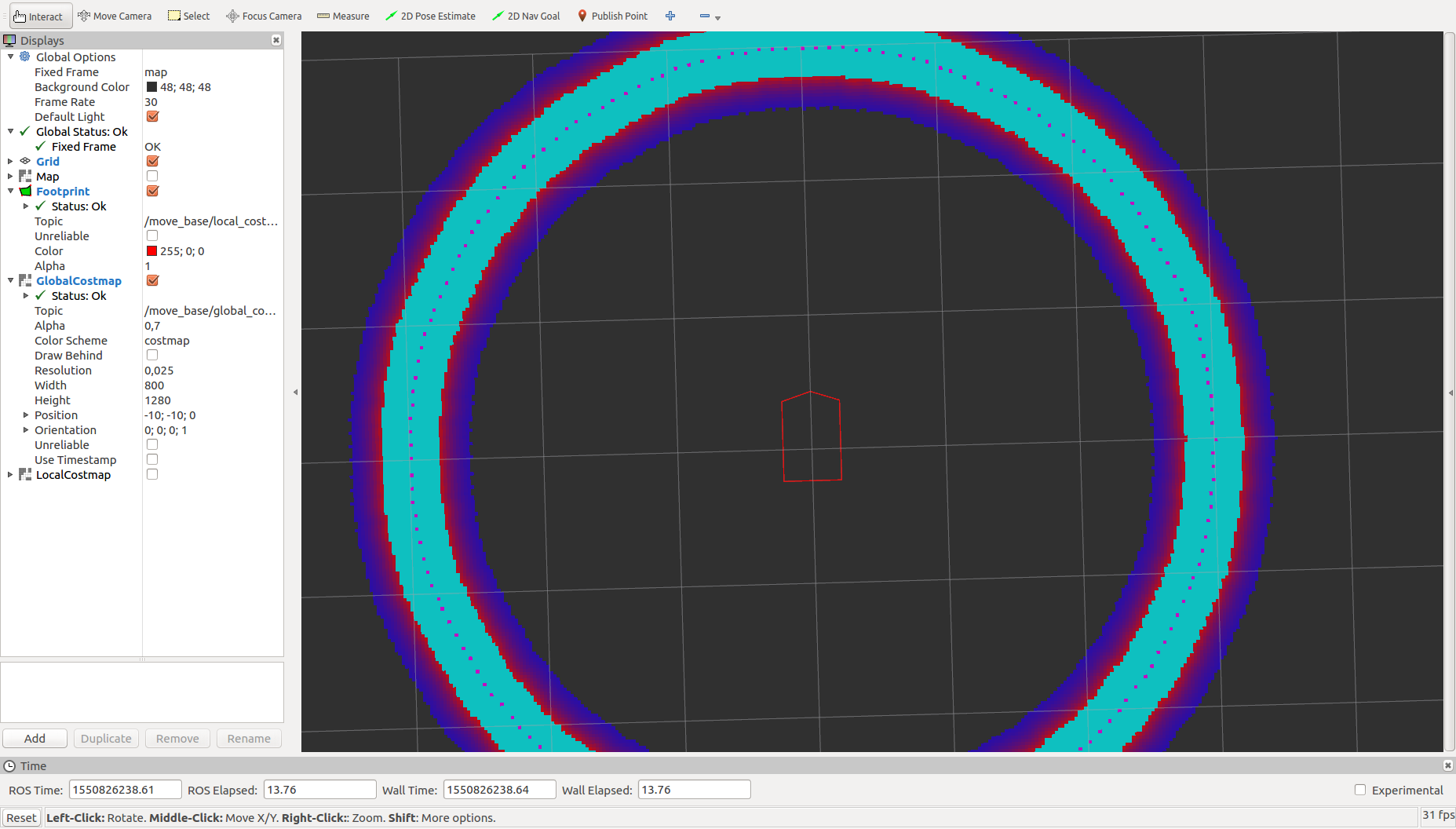
II: 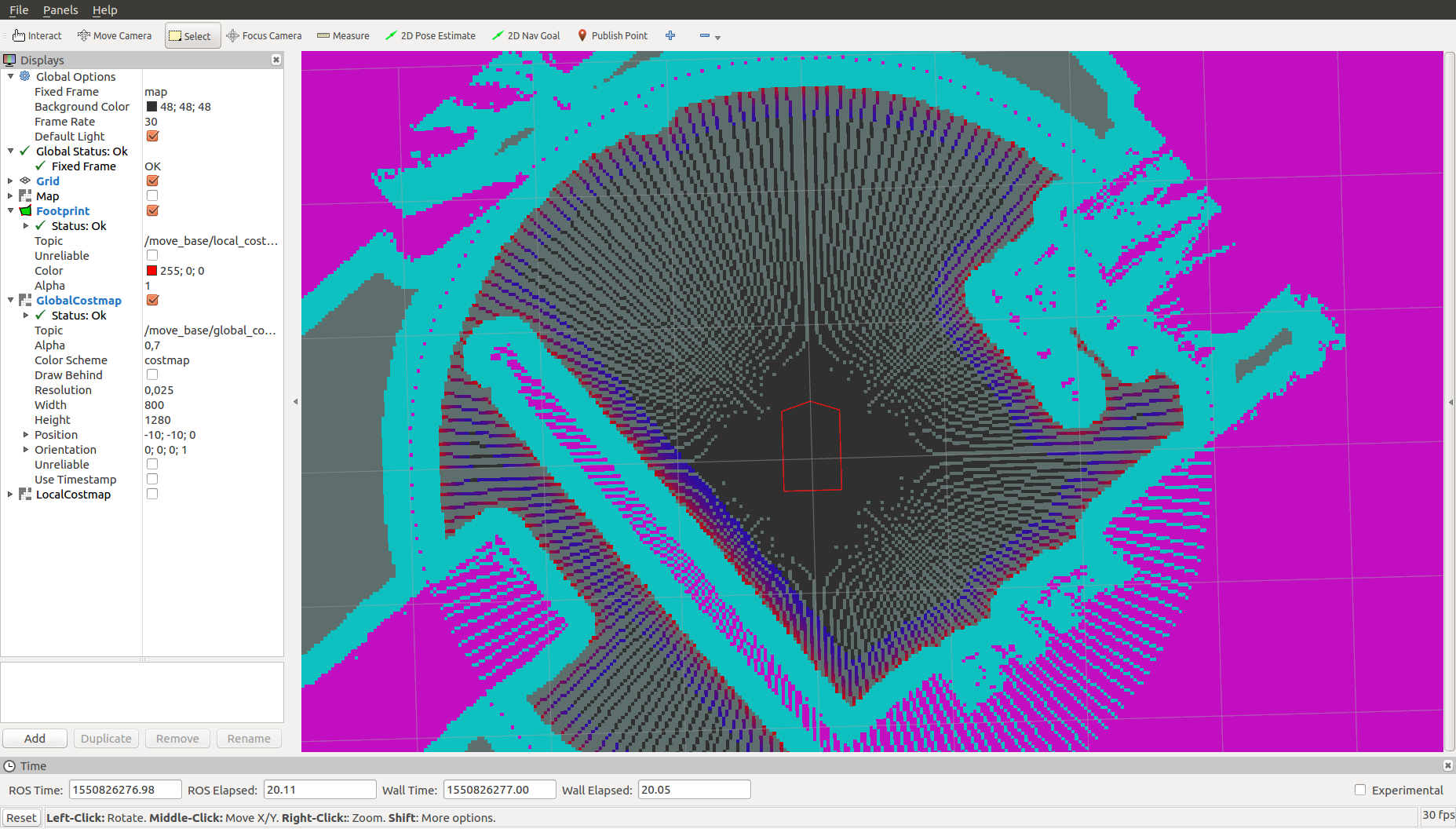 III:
III: 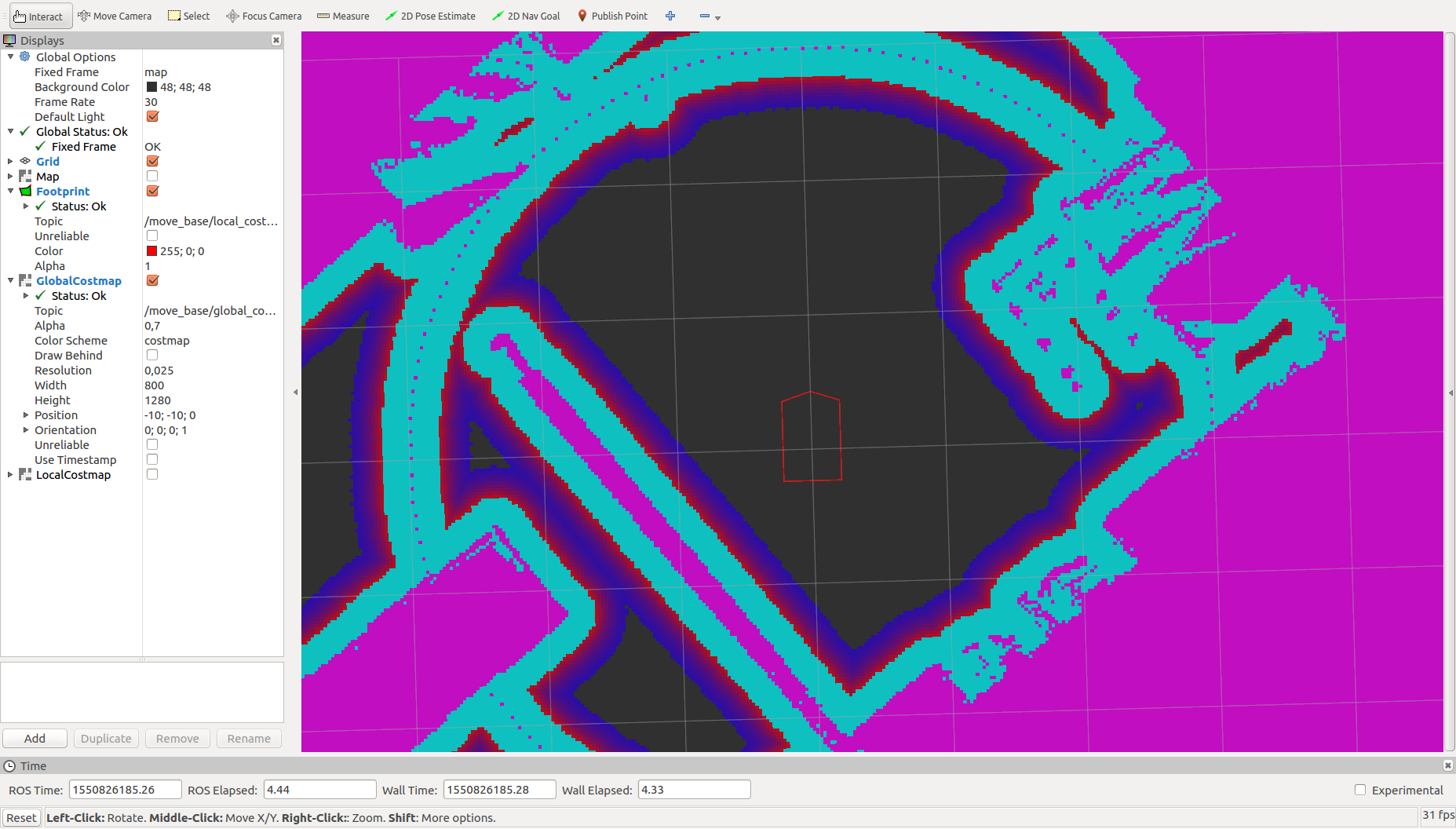 IV:
IV: