The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-03-03 02:18:54 -0500 | received badge | ● Famous Question (source) |
| 2022-12-12 05:09:49 -0500 | received badge | ● Nice Question (source) |
| 2020-04-26 05:53:06 -0500 | received badge | ● Famous Question (source) |
| 2020-01-21 22:51:31 -0500 | marked best answer | rosserial connection not working with custom messages! [SOLVED] Hi community! I've got a problem, as the title suggests, with my custom messages used in arduino. I publish here the arduino code and explain later: As you see, the code is only an expansion of the HelloWorld example of ros_lib. It compiles perfectly. Once uploaded to my Arduino UNO, I call the rosserial connection: And i get this error: The thing is, when I upload the HelloWorld example, the connection works!! and the chatter topic is properly registered in the ROS master, but when I use the new code, it doesn't . I just don't know what's going on here. Thoughts:
For possible answers regarding using Thanks to everyone in advance. I would appreciate a detailed answer. SOLVED!!! LOOK AT THE ANSWERS! |
| 2020-01-21 22:51:31 -0500 | received badge | ● Self-Learner (source) |
| 2020-01-21 22:51:31 -0500 | received badge | ● Teacher (source) |
| 2019-12-12 06:24:37 -0500 | received badge | ● Notable Question (source) |
| 2019-10-28 20:11:52 -0500 | received badge | ● Famous Question (source) |
| 2019-07-23 05:51:21 -0500 | received badge | ● Notable Question (source) |
| 2019-07-23 05:51:21 -0500 | received badge | ● Popular Question (source) |
| 2018-11-16 03:49:09 -0500 | marked best answer | How to add message field in a rosbag I got a rosbag with a number of topics being played. I am interested in adding a Header (more specifically, a frame_id) to the message received so some 3d points in it are automatically displayed in RViz in the correct frame defined. Is this possible? I know you can iterate a rosbag with the type of loop: But I don't know how to add a field to the incoming message and save it in a new bag. |
| 2018-11-16 03:49:07 -0500 | received badge | ● Popular Question (source) |
| 2018-11-15 10:05:59 -0500 | edited question | How to add message field in a rosbag How to add message field in a rosbag I got a rosbag with a number of topics being played. I am interested in adding a He |
| 2018-11-15 10:04:19 -0500 | edited question | How to add message field in a rosbag How to add message field in a rosbag I got a rosbag with a number of topics being played. I am interested in adding a He |
| 2018-11-15 10:03:59 -0500 | asked a question | How to add message field in a rosbag How to add message field in a rosbag I got a rosbag with a number of topics being played. I am interested in adding a He |
| 2018-09-10 01:10:11 -0500 | received badge | ● Famous Question (source) |
| 2018-07-24 12:24:32 -0500 | received badge | ● Famous Question (source) |
| 2018-05-27 10:20:11 -0500 | received badge | ● Notable Question (source) |
| 2018-05-25 02:34:20 -0500 | received badge | ● Popular Question (source) |
| 2018-05-24 16:57:57 -0500 | marked best answer | Unknown noise in uwsim 3D range mapping I am working with UWSim, and I have modelled a rotating multibeam on the AUV (like a lidar on a car) that maps the 3D surroundings of the robot, creating a "range map". I am facing a type of noise in my range values that I cannot determine (see photo). A part from the seafloor (shown above because I got a mess in the TF tree most probably and I haven't managed to put it below the AUV tf), one can see how sparse voxels are mapped as well.
They appear behind the AUV (where there is nothing), and mapped at many different ranges. Is the sonar assigning a wrong range to the tail of the AUV because of it being too close maybe? |
| 2018-05-24 16:57:36 -0500 | answered a question | Unknown noise in uwsim 3D range mapping I found the problem. The noise comes from false measurements of the sonar. The tail of the AUV might be too close to the |
| 2018-04-02 06:10:48 -0500 | commented question | Vehicle not moving, but robot_localization shows motion Have you checked that you are properly subscribed to the odometry topic in your visualizer? Also check that the origin f |
| 2018-04-02 01:58:19 -0500 | received badge | ● Notable Question (source) |
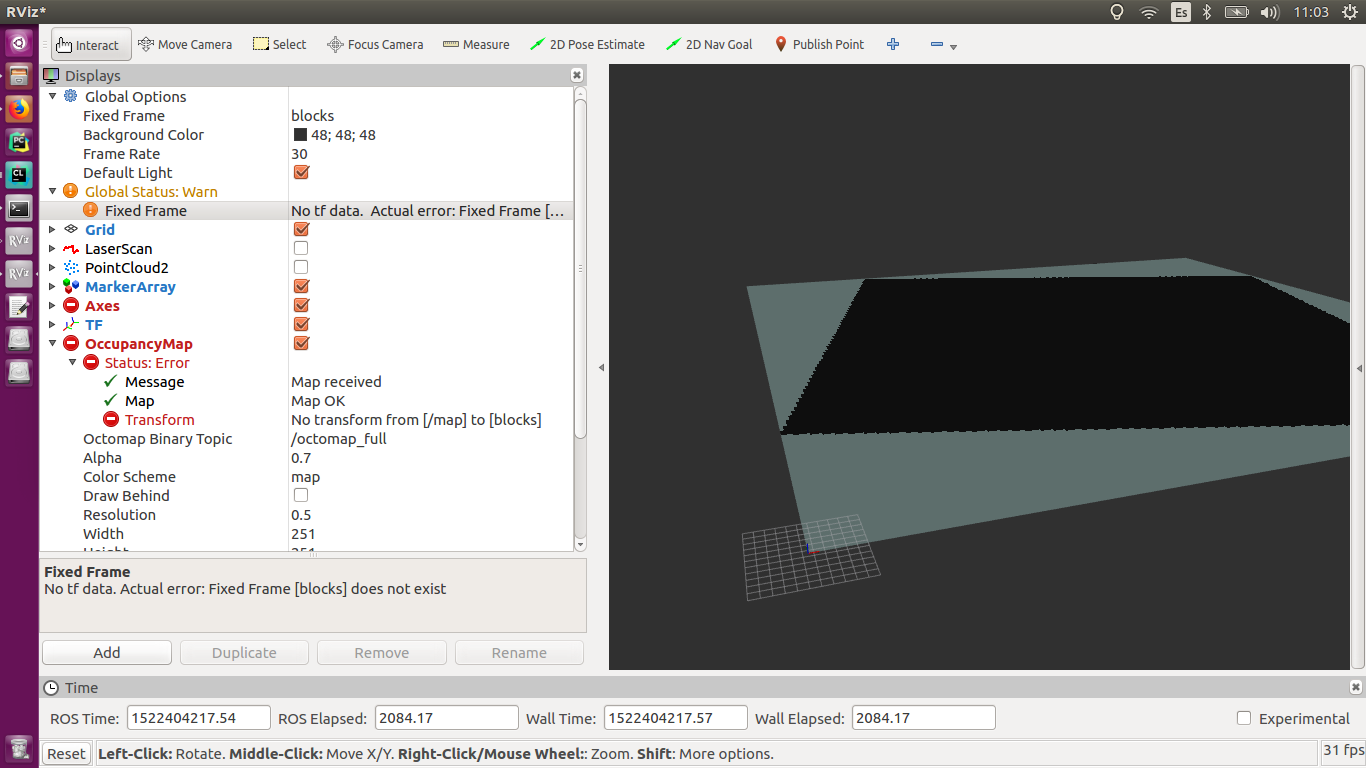
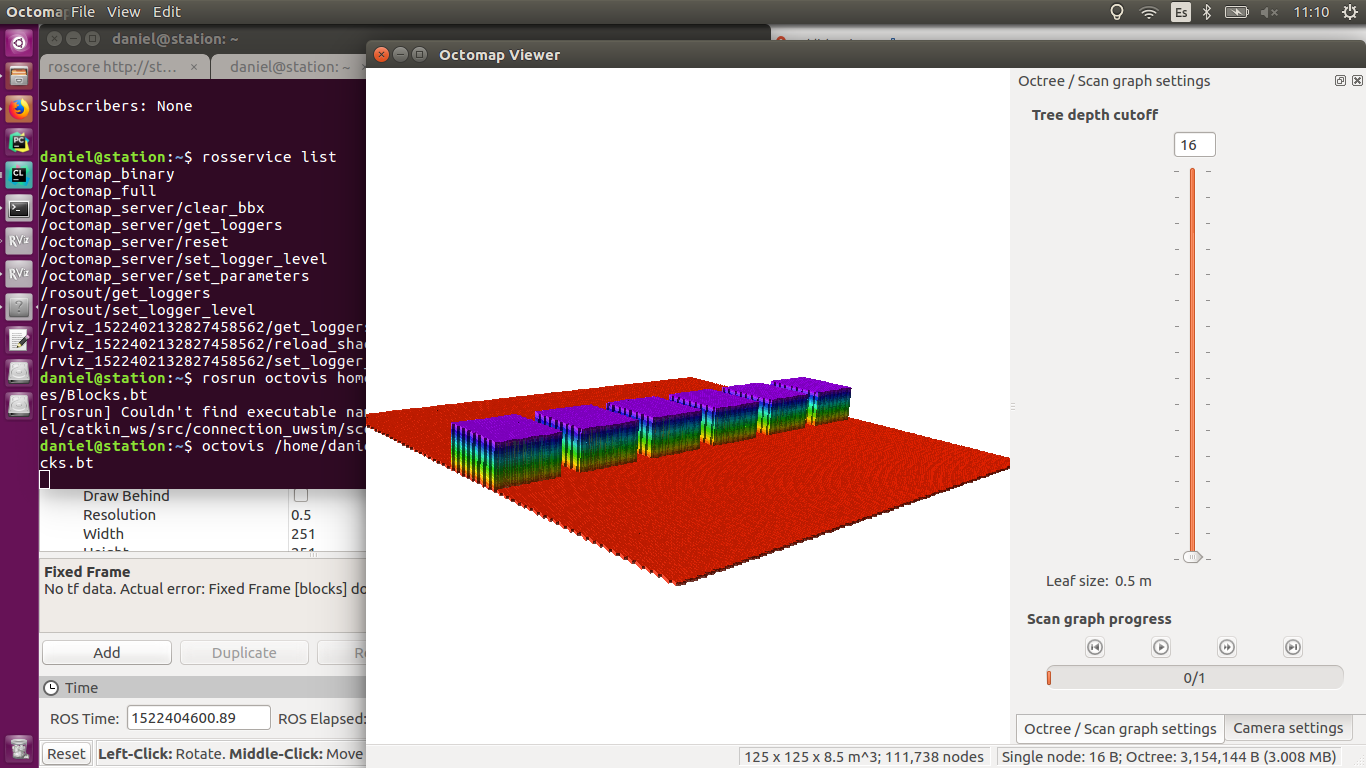
| 2018-04-01 13:09:54 -0500 | marked best answer | Not able to visualize Octomap in RViz I am publishing an octomap from a .bt file with octomap_server such that: But when I try to visualize the octomap in RViz, I am only getting this ¿occupancy base? (see image).
As you see, it is clear that the transform from In OCTOVIS, I do not have this problem and the whole octomap is loaded successfully (see image below).
How can I solve this? |
| 2018-04-01 13:09:36 -0500 | answered a question | Not able to visualize Octomap in RViz I solved it. Surprisingly, when I added the OccupancyMap by doing Add->By topic, it worked and the octomap appeared |
| 2018-03-30 08:49:10 -0500 | received badge | ● Popular Question (source) |
| 2018-03-30 05:10:05 -0500 | edited question | Not able to visualize Octomap in RViz Not able to visualize Octomap in RViz I am publishing an octomap from a .bt file with octomap_server such that: $ ro |
| 2018-03-30 05:08:49 -0500 | edited question | Not able to visualize Octomap in RViz Not able to visualize Octomap in RViz I am publishing an octomap from a .bt file with octomap_server such that: $ ro |
| 2018-03-30 05:06:07 -0500 | asked a question | Not able to visualize Octomap in RViz Not able to visualize Octomap in RViz I am publishing an octomap from a .bt file with octomap_server such that: $ ro |
| 2018-03-22 03:38:40 -0500 | marked best answer | Is the .bt Octomap preserving the coordinates of the ROS environment it has been built from? I think the title is self-explicative. I constructed an Octomap out of a robot moving in a simulated environment. In that environment, the coordinate (x1, y1, z1) with respect to the world frame was occupied by an obstacle. If I check the node (x1, y1, z1) of the created Octomap, will it be occupied, and if so, by the same obstacle? Or will the Octomap have assigned new coordinates based on the .bt file created? Also, will it happen the same when the octomap is not in a .bt file and it is being updated continuously? Thank you. This was also posted on Octomap's GitHub, so I will copy the answer given in one site to the other. |
| 2018-03-22 03:38:22 -0500 | answered a question | Is the .bt Octomap preserving the coordinates of the ROS environment it has been built from? As answered in Octomap's GitHub by @AHornung: https://github.com/OctoMap/octomap/issues/204 "The .bt format does not co |
| 2018-03-19 09:19:48 -0500 | asked a question | Is the .bt Octomap preserving the coordinates of the ROS environment it has been built from? Is the .bt Octomap preserving the coordinates of the ROS environment it has been built from? I think the title is self-e |
| 2018-02-27 01:17:41 -0500 | received badge | ● Famous Question (source) |
| 2018-02-26 03:45:24 -0500 | marked best answer | Do I really need to $ source ~/catkin_ws/devel/setup.bash ? Novice question: I've created a custom message, package, etc as the official tutorial does. But when i do: $ rosrun pkg_test1 pkg_test1_node it gives me: [rospack] Error: package 'pkg_test1' not found Indeed, if i do: $ source ~/catkin_ws/devel/setup.bash the problem is fixed. But do i really need to do that every time i want to use my custom programs? Is there any simple way to mantain them in the ROS path (i think that is what i am doing when i call these commands). Thanks in advance. |
| 2018-02-22 09:30:00 -0500 | edited question | Unknown noise in uwsim 3D range mapping Problem making a joint rotate with attached multibeam to do 3D mapping I am working with UWSim, and I have modelled a ro |
| 2018-02-22 09:25:18 -0500 | asked a question | Unknown noise in uwsim 3D range mapping Problem making a joint rotate with attached multibeam to do 3D mapping I am working with UWSim, and I have modelled a ro |
| 2018-02-16 04:20:50 -0500 | edited answer | Rosserial mbed comunication does not work rosserial_python was a bit unstable when I used it to connect an Arduino to ROS. Could you try using rosserial_server in |
| 2018-02-16 04:19:22 -0500 | answered a question | Rosserial mbed comunication does not work rosserial_python was a bit unstable when I used it to connect an Arduino to ROS. Could you try using rosserial_server in |
| 2018-02-14 13:50:41 -0500 | marked best answer | RViz doesn't load .dae mesh. Cannot locate it. I am trying to load an underwater robot mesh in RViz. Because I could not do this with a .osg file, I converted it to .dae with Blender. Even though I have done that, RViz is still not able to load it (it doesn't even locate it although, of course, the file is there). The file is called newestexport.dae. The error is the following:
Also, Meshlab and Blender are able to open the mesh without any problem. The name of the file is correct. So that is discarded. Any thoughts? EDIT: I show the .URDF file that calls the mesh: Thank you. UPDATE: If you change the path |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.