The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-11-17 06:04:10 -0500 | marked best answer | Odometry first check failed in Navigation Tuning guide As stated in Navigation tuning guide http://wiki.ros.org/navigation/Tutori... [The first test checks how reasonable the odometry is for rotation. I open up rviz, set the frame to "odom," display the laser scan the robot provides, set the decay time on that topic high (something like 20 seconds), and perform an in-place rotation. Then, I look at how closely the scans match each other on subsequent rotations. Ideally, the scans will fall right on top of each other, but some rotational drift is expected, so I just make sure that the scans aren't off by more than a degree or two.] what to do if this test fails? I have an error of 10 degrees when the above test is performed. How to reduce this error so that the scans aren't off by more than a degree or two? The second test i.e., for translation its working fine. The problem is only when it is rotating. Someone please help me with this problem. Thanks I am using Ubuntu 14.04, Ros indigo and it is a differential drive robot. |
| 2020-11-16 07:54:18 -0500 | received badge | ● Good Answer (source) |
| 2020-11-16 07:54:18 -0500 | received badge | ● Enlightened (source) |
| 2020-10-23 03:15:08 -0500 | marked best answer | custom recovery behaviors Hi, I want my robot to move back whenever it gets stuck, for this I want to write a custom recovery behavior. Can someone explain how to write a custom recovery behavior? I am using ubuntu 14.04 and ros indigo |
| 2020-10-23 03:15:08 -0500 | received badge | ● Nice Answer (source) |
| 2020-10-23 03:15:08 -0500 | received badge | ● Nice Question (source) |
| 2020-05-04 14:38:43 -0500 | received badge | ● Good Question (source) |
| 2019-08-20 00:25:00 -0500 | received badge | ● Good Question (source) |
| 2019-08-12 22:32:39 -0500 | received badge | ● Nice Question (source) |
| 2018-05-22 21:23:00 -0500 | answered a question | Local planner ignores collision with humans in social navigation layers Generally, whenever DWA local planner detects an obstacle it stops the robot and move_base sends control to the global |
| 2018-04-06 02:33:24 -0500 | received badge | ● Taxonomist |
| 2018-01-19 08:17:59 -0500 | received badge | ● Nice Question (source) |
| 2017-11-25 00:52:50 -0500 | commented question | Stop the robot if an obstacle is detected Hi @Deepika did you find any solution to differentiate dynamic obstacles from static map? |
| 2017-11-12 22:10:39 -0500 | received badge | ● Famous Question (source) |
| 2017-08-21 18:45:38 -0500 | received badge | ● Notable Question (source) |
| 2017-08-21 18:45:38 -0500 | received badge | ● Popular Question (source) |
| 2017-08-07 05:13:42 -0500 | received badge | ● Famous Question (source) |
| 2017-04-27 07:54:30 -0500 | received badge | ● Famous Question (source) |
| 2017-04-07 02:06:48 -0500 | received badge | ● Famous Question (source) |
| 2017-03-23 03:35:39 -0500 | received badge | ● Favorite Question (source) |
| 2017-03-22 14:09:51 -0500 | commented answer | obstacles are not cleared completely in costmap Thanks it solved my problem |
| 2017-03-21 14:04:39 -0500 | received badge | ● Notable Question (source) |
| 2017-03-21 13:47:21 -0500 | commented question | obstacles are not cleared completely in costmap I already tried the rangesensor layer it also has same problem |
| 2017-03-21 13:46:04 -0500 | commented question | obstacles are not cleared completely in costmap Yeah the dot gets away if i rotate the robot but that doesn't solve the problem. When the robot is stationary and if it leaves obstacles then while planning the path it says there is no path found. |
| 2017-03-20 13:10:24 -0500 | commented question | obstacles are not cleared completely in costmap Also, when I tried to use Range Sonar Layer for my entire suit of sensors (5 in total), some of the sensors did not populate the costmap and so i am using lasercan to simulate the sonar layer. |
| 2017-03-20 13:09:10 -0500 | commented question | obstacles are not cleared completely in costmap Do you think that TF could be an issue ( in reference to the robot pose) due to which the center of the obstacle moves outside field of view? |
| 2017-03-20 13:06:35 -0500 | commented question | obstacles are not cleared completely in costmap Yeah the black dot @ sec 11 is the problem. The robot is stationary in the current scenario and hence, if it is populated by the laser scan of the sensor then it should not be the case that the center of the obstacle is outside field of view. |
| 2017-03-20 12:59:34 -0500 | received badge | ● Popular Question (source) |
| 2017-03-19 22:06:41 -0500 | commented question | obstacles are not cleared completely in costmap I checked that, the sensor value is not greater than max_range |
| 2017-03-17 15:02:01 -0500 | asked a question | obstacles are not cleared completely in costmap Hi everyone, I am converting the ultrasound sensors data to laser scan and it is used to update the local costmap. The obstacles are not cleared completely even when the obstacles moves out of frame. The ultrasound sensor readings are giving the correct data that there is no obstacle but in the costmap at some places the obstacles are not getting cleared. I went through the raytrace line code and everything seems correct. This is the video link which shows the scenario: https://youtu.be/y8qTmAwNyMA I am including my local_costmap_params.yaml : Please check the video and suggest something. I am stuck with this problem from a long time. I tried almost everything. So someone please look into this problem. Thanks in Advance |
| 2017-03-14 17:12:31 -0500 | received badge | ● Notable Question (source) |
| 2017-03-14 17:12:31 -0500 | received badge | ● Famous Question (source) |
| 2017-03-10 14:59:44 -0500 | received badge | ● Famous Question (source) |
| 2017-03-03 19:26:19 -0500 | received badge | ● Student (source) |
| 2017-01-11 18:39:58 -0500 | commented question | Problem with 180 degree turn Hi David, I added the image of rviz by turning on the cost cloud, i don't see any difference when i turn on the costcloud. Do i have to make any other changes to notify the costcloud? |
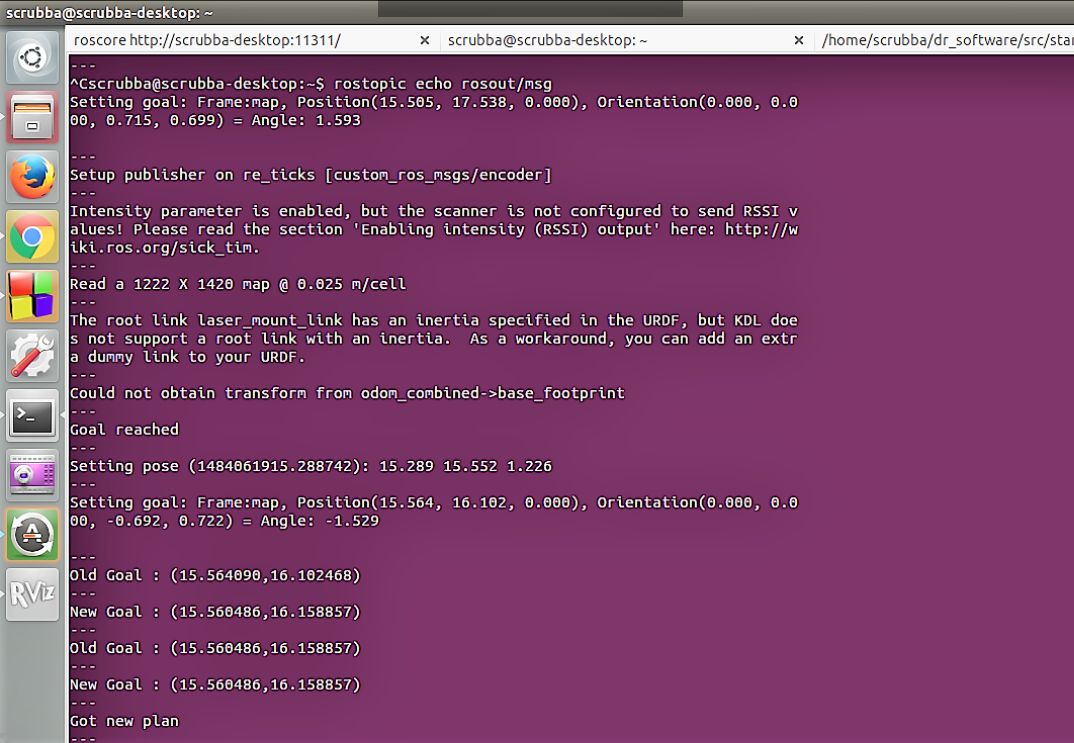
| 2017-01-11 18:38:47 -0500 | edited question | Problem with 180 degree turn Hi everyone, Whenever I give a goal exactly opposite to the robot i.e., 180 degree to the robot, the robot is not able to turn and moving straight with velocity of 0.1m/s untill it reaches any obstacle and getting stuck. This is happening only when i give goal exactly opposite to the robot. If the angle is less than 180 degrees, it is able to turn. I went through DWA local planner but not able to find any solution. Can someone explain how to solve this problem? I am attaching the link for the video I am using ROS Indigo, Ubuntu 14.04 and dwa as local planner Update: I am attaching the photo of rostopic echo rosout/msg
Update 2: Attaching the image of /move_base/DWAPlannerROS/cost_cloud in rviz
|
| 2017-01-11 18:20:21 -0500 | received badge | ● Notable Question (source) |
| 2017-01-10 11:55:47 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.