The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-10-01 09:21:18 -0500 | received badge | ● Favorite Question (source) |
| 2016-12-06 01:10:45 -0500 | received badge | ● Nice Question (source) |
| 2014-01-28 17:21:52 -0500 | marked best answer | Does ROS provide any sync mechanism for multiple Kinects? Hi all, Does any one have some ideas on how to sync multiple kinects using ROS? (or any other library) Or do I have to manually write my own lib for triggering the USBs? (Also, I have a feeling my kinects are on the same USB) Any references or links are appreciated. Thank you. |
| 2014-01-28 17:21:47 -0500 | marked best answer | how to use external libraries in ROS code? Hi, We have a GUI that was developed using Qt and now we are planning to use ROS in our code. Is it possible to integrate ROS with our existing Qt code? In a general sense, how do we use external libraries such as Qt, OpenGL and user built libraries with ROS code? Thank you. |
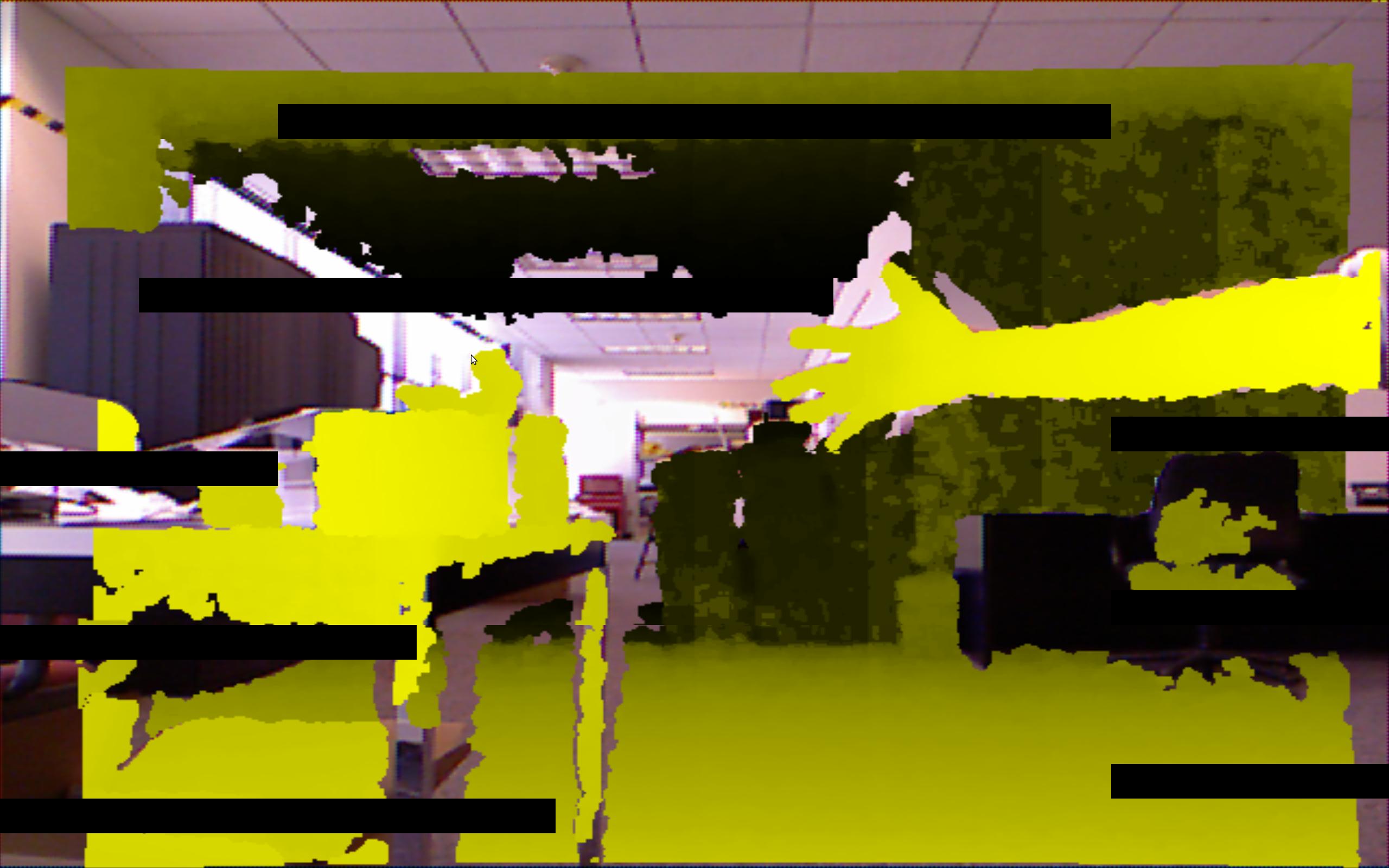
| 2014-01-28 17:21:46 -0500 | marked best answer | NI Stack shows different outputs on Kinect Hi, So basically, if I build the sample source files such as NiSimpleViewer.cpp I see a clear disparity between depth and image data when I use DISPLAY_MODE_OVERLAY but when I run the binary Sample-NiSimpleViewer provided with the library I get a good overlap between the data Am I missing something, do I have to calibrate my kinect manually and use those parameters? or if you have a link to the source on which the binary ni/ni/openni/bin/Sample-NiSimpleViewer is built on, please reply me. Thank you. I initially assumed that the binaries provided in the stack ni @ ni/ni/openni/bin are actually built on code provided @ ni/ni/openni/build/openni/Samples but when I run ni/ni/openni/bin/Sample-NiSimpleViewer it gives a different output than ni/ni/openni/build/openni/Samples/NiSimpleViewer/NiSimpleViewer.cpp Here are the images that I obtained from both
If you look at my hand in both the images then you can see a clear disparity. [I am using diamondback on Ubuntu 10.04] Best, CV |
| 2014-01-28 17:21:45 -0500 | marked best answer | multiple subscriptions ignoring messages [updated] Hello,
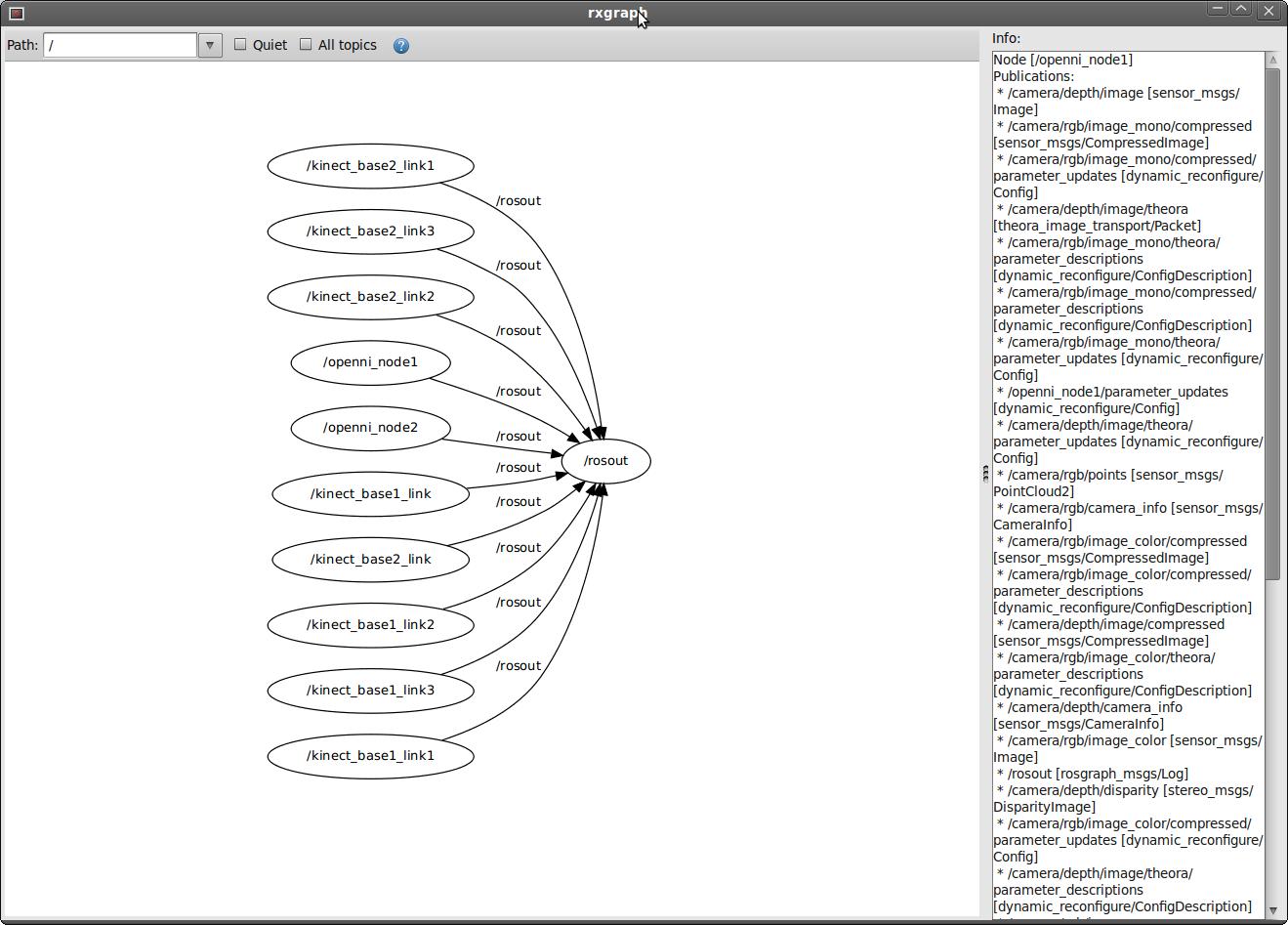
My node is listening to 2 kinects on 8 topics for messages. Even though messages are published on all topics only 4 of the callbacks are invoked. I tried changing the LOOP_RATE, increased the QUEUE size but doesn't make a difference. Is there something I am doing wrong or missing?
Here's the code that I was running: listener.cpp
And here are my launch files for kinects:
Kinect1_openni_node.launch, Kinect2_openni_node.launch, kinect_frames1.launch , kinect_frames2.launch
Here's my rxgraph
Thanks for any help. Best, CV |
| 2014-01-28 17:21:45 -0500 | marked best answer | roswtf warnings: unexpectedly connected. Hello, when I run roswtf I get the following warning. Why does it think the nodes are unexpectedly connected? Best, CV |
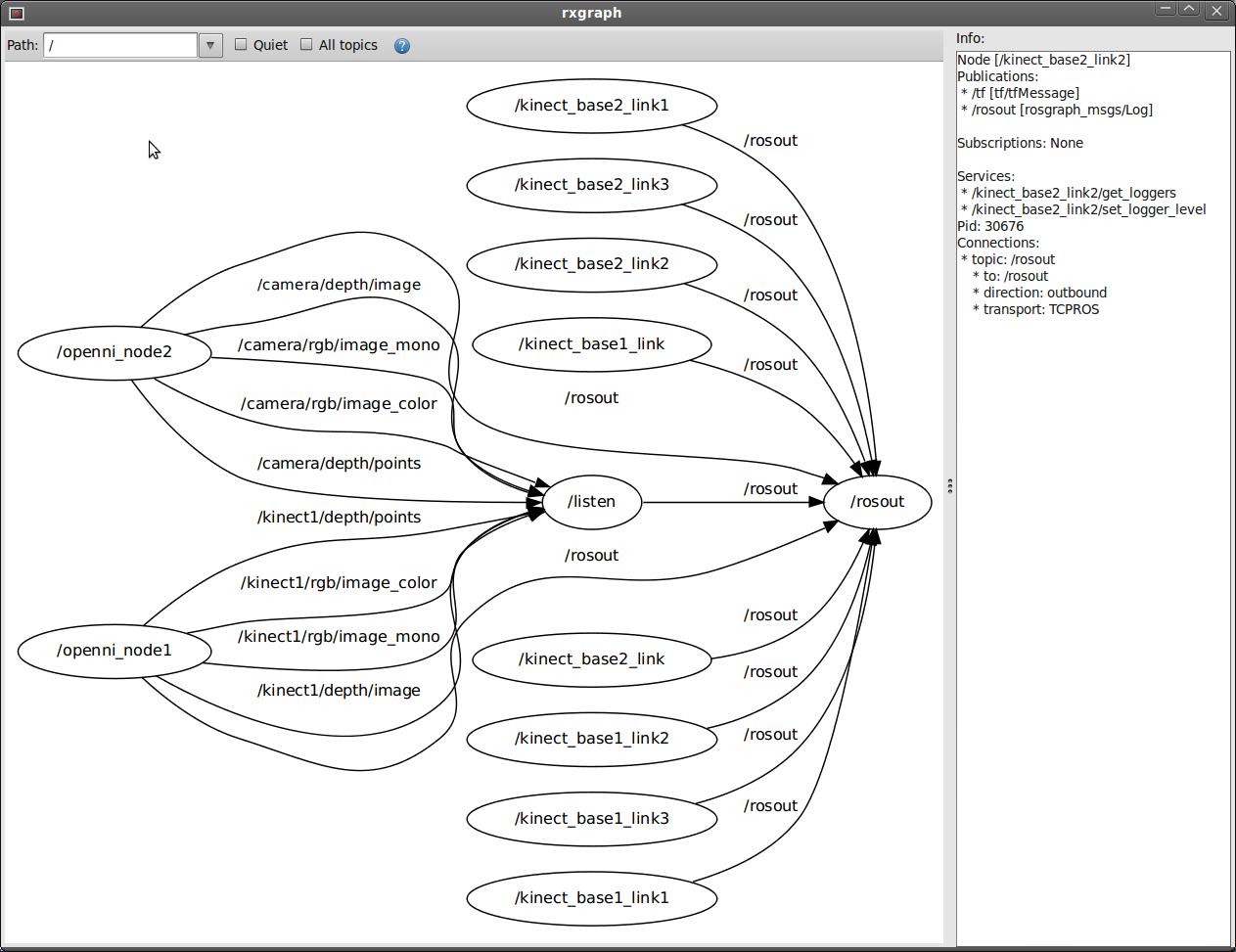
| 2014-01-28 17:21:44 -0500 | marked best answer | Multiple Kinects: Same Topics from different nodes, how to subscribe? Hi All, If anyone has any links or references about connecting 2 or more Kinects to the same computer and specifically obtaining & integrating data from them, could you please reply here?
So I am able to launch separate files for each kinect and am able to launch data separately. Here's the output of my rxgraph
The problem is my process listens to a topic and it cannot distinguish between same topics from different nodes, how can I make them publish topics with unique names? or how can I listen to topics from a specific node? Best, CV |
| 2014-01-28 17:21:43 -0500 | marked best answer | how to display a mesh with texture in RViz? Hello All, All am trying is loading an OBJ model from a file and display/visualize using RViz. Or consider I have a node that publishes a new mesh and corresponding texture data @30Hz. Is there a way to display this 3D mesh with texture in RViz? Thank you for any help. Best, CV |
| 2014-01-28 17:21:42 -0500 | marked best answer | how to calibrate a 2D camera with respect to Kinect? Hello all, I have a 2D thermal imaging camera mounted right on top of my kinect. I am trying to calibrate these two sensors so as to integrate data from them. Is there a way to do this using any of ROS packages or external libraries? Also, if you know of a way of calibrating a regular camera with kinect please feel free to share. Please feel free to share any references or solutions on this problem.Best, CV |
| 2014-01-28 17:21:34 -0500 | marked best answer | Swissranger with OpenNI Has anyone worked on using OpenNI tracking algorithms with Swissranger data or any PointCloud data? I am able to obtain PointCloud data published by swissranger but not sure how I can use with OpenNI, well, I'll try to figure out something but in the meantime wanted to see if anyone has worked on it already. |
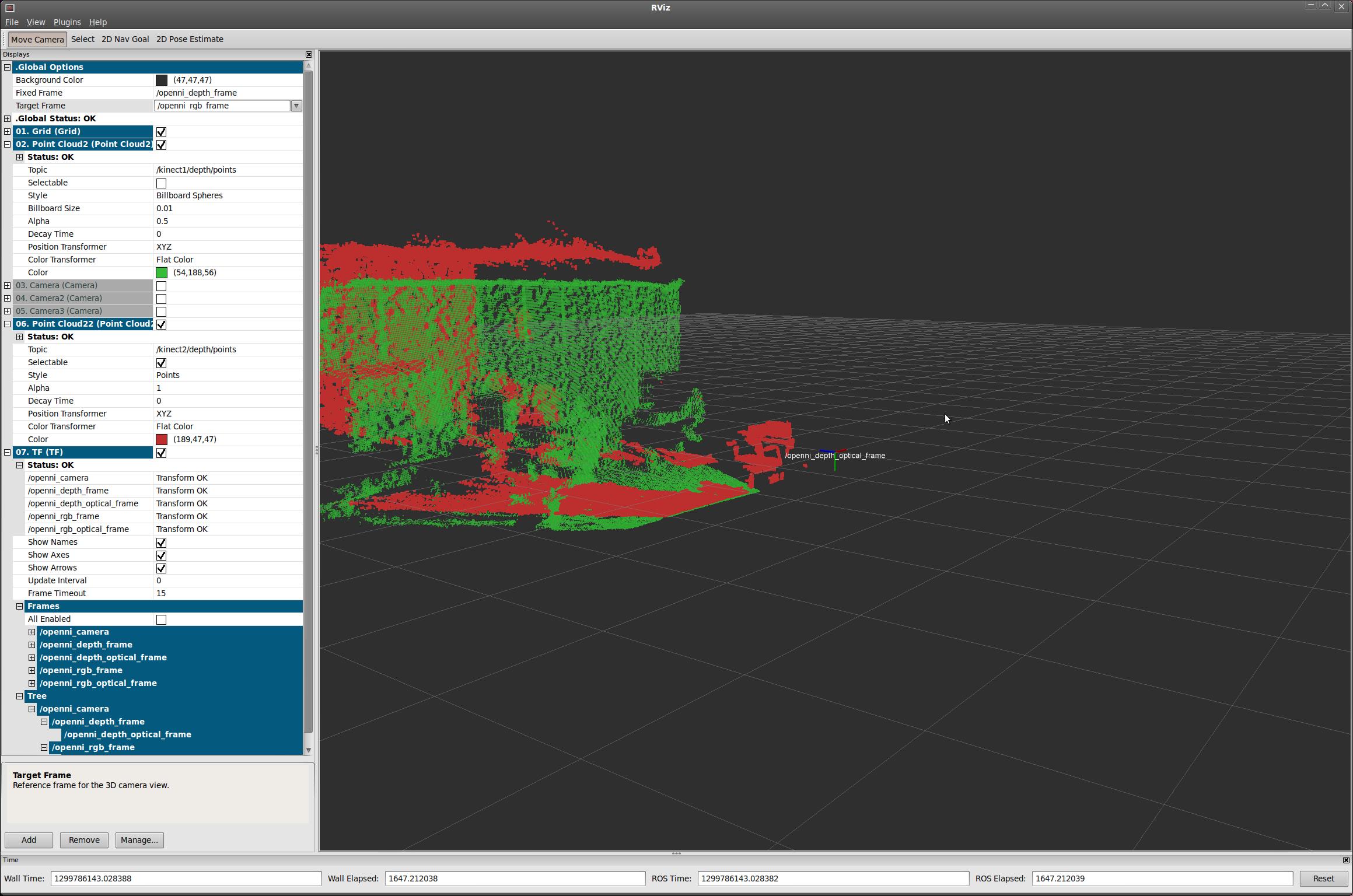
| 2014-01-23 04:45:47 -0500 | marked best answer | how to apply transform to data displayed in RVIZ? Hello, I am getting pointcloud data from different kinects which are facing each other and I am trying to visualize using "rviz". I want to apply a transform (rotate 180 around y-axis) to one of the point clouds and display it, any ideas on how do this? Thank you.
My launch files: Kinect1_openni_node.launch, Kinect2_openni_node.launch, kinect_frames1.launch, kinect_frames2.launch
As you can see in the image the opposite walls are displayed on the same side i.e. w.r.t to their (kinect's) axes.
UPDATE: Here's the output of the transforms Even then I don't see any change, it's the same as the image above. Am I missing any settings in RViz?? Best, CV |
| 2014-01-08 11:23:42 -0500 | received badge | ● Nice Question (source) |
| 2013-04-15 05:32:20 -0500 | received badge | ● Nice Question (source) |
| 2013-01-31 01:09:25 -0500 | received badge | ● Nice Answer (source) |
| 2013-01-08 21:16:15 -0500 | received badge | ● Famous Question (source) |
| 2012-12-04 21:55:32 -0500 | received badge | ● Famous Question (source) |
| 2012-10-31 05:49:01 -0500 | received badge | ● Famous Question (source) |
| 2012-10-01 23:00:33 -0500 | received badge | ● Popular Question (source) |
| 2012-10-01 23:00:33 -0500 | received badge | ● Notable Question (source) |
| 2012-10-01 23:00:33 -0500 | received badge | ● Famous Question (source) |
| 2012-08-30 11:49:42 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

 When I run listener.cpp , all I get is the following i.e. it skips messages from 4 topics
When I run listener.cpp , all I get is the following i.e. it skips messages from 4 topics