The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-06-23 03:38:16 -0500 | received badge | ● Good Answer (source) |
| 2022-06-23 03:38:16 -0500 | received badge | ● Enlightened (source) |
| 2020-04-16 13:49:17 -0500 | received badge | ● Nice Answer (source) |
| 2019-08-15 03:05:08 -0500 | received badge | ● Famous Question (source) |
| 2018-11-29 08:55:25 -0500 | received badge | ● Famous Question (source) |
| 2018-02-28 08:14:50 -0500 | received badge | ● Nice Question (source) |
| 2018-02-28 08:14:37 -0500 | received badge | ● Necromancer (source) |
| 2018-02-28 08:14:37 -0500 | received badge | ● Self-Learner (source) |
| 2018-02-28 08:14:37 -0500 | received badge | ● Teacher (source) |
| 2018-01-29 16:18:44 -0500 | received badge | ● Notable Question (source) |
| 2018-01-29 16:18:44 -0500 | received badge | ● Popular Question (source) |
| 2017-02-19 01:57:05 -0500 | received badge | ● Famous Question (source) |
| 2017-02-19 01:57:05 -0500 | received badge | ● Notable Question (source) |
| 2017-02-12 12:44:12 -0500 | received badge | ● Editor (source) |
| 2017-02-12 12:42:57 -0500 | asked a question | markers LINE_STRIP not working with rospy Hello community, I am trying to implement markers (LINE_STRIP) using python nodes. I was able to get SPHERE, CUBE and CYLINDER working but not LINE_STRIP, LINE_LIST. I would appreciate if someone can spot any missing implementation. Here is the code snippet: cpp implementation works fine but I need a python implementation and I didn't find any python tutorials on markers |
| 2016-11-16 01:50:46 -0500 | received badge | ● Notable Question (source) |
| 2016-08-28 18:32:00 -0500 | received badge | ● Popular Question (source) |
| 2016-08-25 12:54:47 -0500 | asked a question | ROS service: problem passing parameters My service file is as follows: When I try to pass a numpy array of type float64 to the server, It gives me an error which is: I understood that I have to pass a list or tuple, so I converted the numpy array to a list as and now it gives me the following error: The tolist() method converts the numpy array to a list with nearest compatible python type (in this case, it is a float). My question: is it possible to preserve the float64 type when converting to a list? I tried changing my service file to "float" and ROS is not allowing it. Only float32 and float64 are allowed. Any help in this regard is much appreciated. |
| 2016-05-11 13:39:12 -0500 | commented question | Is there a way to convert LaserScan messages to Image message? Hi srik11, I posted the answer, have a look. |
| 2016-05-11 13:38:20 -0500 | answered a question | Is there a way to convert LaserScan messages to Image message? Hello srik11 and all, If all you need is to convert laser scan msgs into an image and apply some cv algorithms, you don't even need PCL in between. This is how I did hallway detection from the laser data: (Note: This is not the only way. It works and does the job) If you realized, the laser output is already in polar form i.e., (r, theta) [distance of object in a particular direction]. All you need to do is take an empty image (by which I mean an image with all white pixels) and using (r, theta) calculate (x, y) which is (r cos theta, r sin theta). Round of (x, y) and in the image, change the corresponding (x, y) pixel from white to black. Repeat this for all the (r, theta) pair from the laser scan. Please also note that you might want to shift the origin (laser origin is at the center and the image origin should always be on the top left corner - atleast for openCV image format). formulas for origin shift: X = x - h, Y = y - k. You might want to scale the image down to a reasonable size for you to process it especially if your laser scanner range is high. I hope this helps. Happy coding! |
| 2016-05-11 13:20:18 -0500 | received badge | ● Popular Question (source) |
| 2016-05-10 21:17:00 -0500 | received badge | ● Famous Question (source) |
| 2016-03-01 05:56:23 -0500 | received badge | ● Famous Question (source) |
| 2016-03-01 00:26:46 -0500 | marked best answer | Detecting hallways using LaserScan data Hello everyone, I am trying to detect hallways (two solid parallel lines) using laser data (sensor_msgs/LaserScan). Does anyone know of any ready to use ROS packages to get this job done. If there are no ready to use packages, my other option is to use Hough transforms to detect straight lines and search for two parallel lines. To do this, I have converted sensor_msgs/LaserScan to sensor_msgs/PointCloud2. How do I access individual points so that I can discard the Z axis values and apply Hough transform by voting an accumulator. (I am assuming PointCloud2 is a message type and we can not access individual points) Do I need to convert it into some other form? If so how can I do that? Any help is much appreciated. Thank you. |
| 2016-03-01 00:26:46 -0500 | received badge | ● Scholar (source) |
| 2016-02-23 15:37:34 -0500 | received badge | ● Enthusiast |
| 2016-02-23 00:45:33 -0500 | received badge | ● Notable Question (source) |
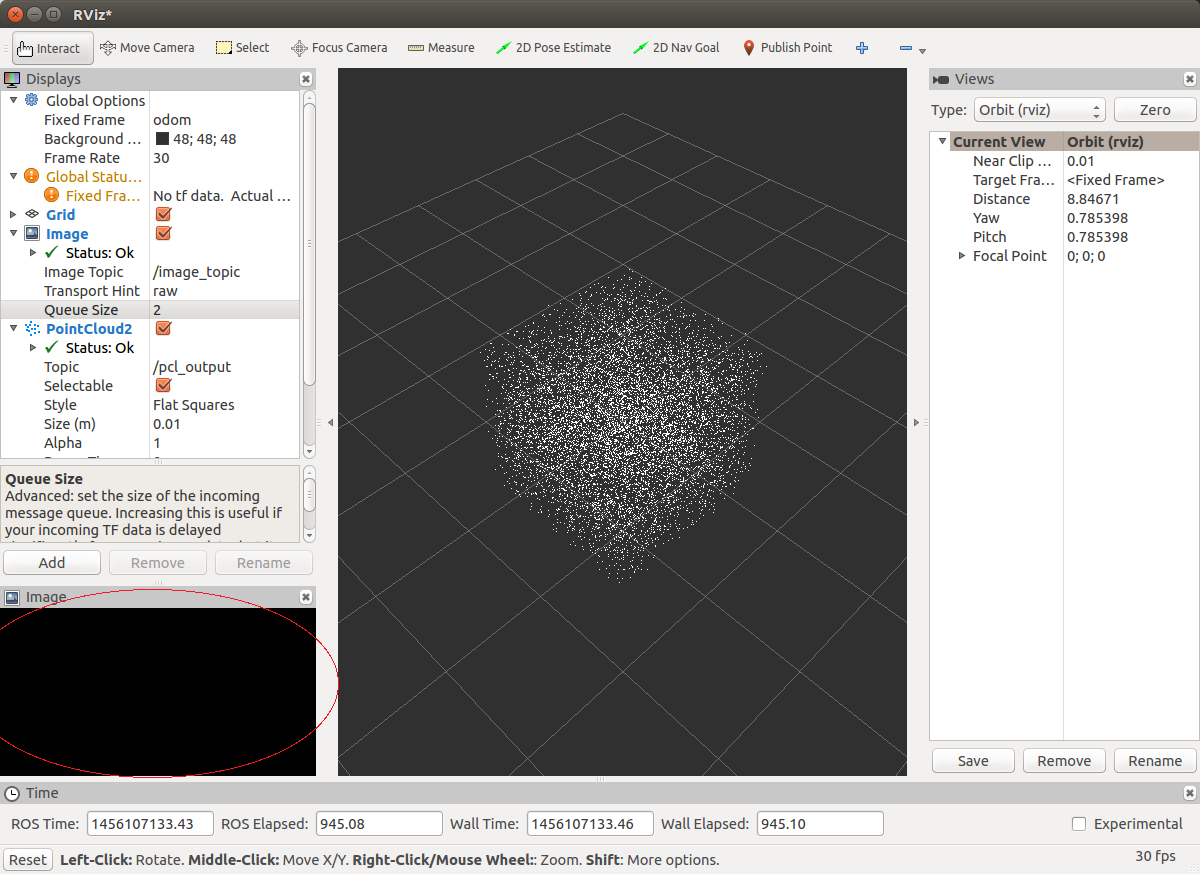
| 2016-02-21 20:25:56 -0500 | asked a question | pointcloud to image conversion Hello everyone, I am converting pointcloud to image and I can't view it in RVIZ. Am I converting it into image properly? My code is as follows: Rviz output is as follows:
|
| 2016-02-21 05:26:57 -0500 | received badge | ● Student (source) |
| 2016-02-21 04:02:57 -0500 | received badge | ● Popular Question (source) |
| 2016-02-20 20:59:20 -0500 | asked a question | Is there a way to convert LaserScan messages to Image message? Hello I am trying to convert laser scan data into images so that I can find "Lines". Following are the snippets from my code: conversion When I run it, "Failed to find match for field 'rgb' " is the error I get. When I use rviz, all I see is an Image which is full of black color. My laser gives is 2D data (i.e, z in point cloud is 0) and I need a 2D image so that I can apply CV algorithms on the image. Thank you. |
| 2016-02-19 03:39:42 -0500 | received badge | ● Notable Question (source) |
| 2016-02-18 23:32:22 -0500 | received badge | ● Popular Question (source) |
| 2016-02-18 21:06:16 -0500 | commented answer | Detecting hallways using LaserScan data I was restricted to 300 characters. So I wrote as an answer please reply to that. Thanks. |
| 2016-02-18 21:04:18 -0500 | answered a question | Detecting hallways using LaserScan data Thanks for the quick reply. Yes, what you said seems valid. However, I have a question, How do I apply hough's transform to laser data? for the equation r = x cos theta + y sin theta, I can get r value (range in laser message), theta (theta increments from the laser message). I am still left with two unknowns x and y. I used hough's transforms on Images before as follows: I iterate over every pixel and for every edge pixel, I calculate theta using gradient, solve for r in r = x cos theta + y sin theta vote for r , theta in a accumulator. The (r, theta) that gets maximum votes are my hough parameters. So, when I have two unknowns (x, y ) how can solve for the equation. Edit: I found the answer. The laser messages are already in polar form. so, you have r and theta from it. Using r, theta find x = r * cos theta and y = r * sin theta. round of both x and y. Using opencv create an empty image (white image) - the image size depends on the accuracy/resolution you need, for every calculated x, y manipulate pixel at x,y to black pixel. By doing so, you will get a white image with black dots (walls/obstacles detected by the laser). Now, use the built in Hough transform from OpenCV and find the lines. In order to detect the hallway, select two strong lines whose slopes are equal. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.