
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-01-23 11:03:26 -0500 | received badge | ● Famous Question (source) |
| 2021-07-29 12:10:45 -0500 | received badge | ● Famous Question (source) |
| 2021-07-29 12:10:45 -0500 | received badge | ● Notable Question (source) |
| 2021-06-02 09:09:06 -0500 | received badge | ● Notable Question (source) |
| 2021-05-13 08:32:21 -0500 | received badge | ● Popular Question (source) |
| 2021-03-16 19:31:53 -0500 | asked a question | Move group node crashes while planning with approximate constraint manifold Move group node crashes while planning with approximate constraint manifold Platform: Ubuntu 18.04.2 (Kernel: 5.4.0-66 |
| 2020-10-10 09:46:14 -0500 | received badge | ● Famous Question (source) |
| 2020-09-08 09:05:41 -0500 | received badge | ● Good Question (source) |
| 2020-03-01 05:41:17 -0500 | received badge | ● Popular Question (source) |
| 2020-02-17 15:16:15 -0500 | received badge | ● Notable Question (source) |
| 2020-02-17 15:16:15 -0500 | received badge | ● Popular Question (source) |
| 2019-11-30 16:33:07 -0500 | answered a question | How to define a python version for ROS You can use this command catkin build --cmake-args -DPYTHON_VERSION=2.7 For further reference, you can try out dif |
| 2019-11-30 16:33:07 -0500 | received badge | ● Rapid Responder (source) |
| 2019-11-30 16:29:21 -0500 | commented question | How to define a python version for ROS Always add your ROS Distro to your question to get more directed answer. Because ROS Kinetic supports only python 2.7 bu |
| 2019-11-26 20:47:08 -0500 | asked a question | md5 error while saving planning scene/state from RVIZ to MongodBdatabase md5 error while saving planning scene/state from RVIZ to MongodBdatabase I am using Ubuntu 16.04 with ROS kinetic. I wan |
| 2019-11-15 14:31:41 -0500 | received badge | ● Nice Question (source) |
| 2019-11-15 14:31:31 -0500 | received badge | ● Favorite Question (source) |
| 2019-10-31 17:53:25 -0500 | asked a question | Configurable time parametrization method for default cartesian path planner in moveit Configurable time parametrization method for default cartesian path planner in moveit Moveit offers three different time |
| 2019-10-31 17:48:54 -0500 | asked a question | Reconfigurable Time parametrization method for cartesian path planner in moveit. Reconfigurable Time parametrization method for cartesian path planner in moveit. Moveit offers three different time para |
| 2019-04-22 02:47:05 -0500 | received badge | ● Great Question (source) |
| 2019-01-08 09:07:08 -0500 | marked best answer | Moveit-catkin build Why does source installation of moveit package needs to be built with catkin build command instead of catkin_make? What is the advantage of doing so. |
| 2019-01-08 09:07:07 -0500 | received badge | ● Nice Question (source) |
| 2018-11-01 09:16:18 -0500 | received badge | ● Famous Question (source) |
| 2018-07-12 18:58:51 -0500 | received badge | ● Nice Answer (source) |
| 2018-02-28 20:37:06 -0500 | marked best answer | Implementing path constraints for Moveit in python I have a 6 DOF arm and it has been interfaced with moveit. Now I want to move the arm from point A to point B with one of the joint having a |
| 2018-02-26 01:01:34 -0500 | received badge | ● Famous Question (source) |
| 2018-01-14 22:29:17 -0500 | received badge | ● Famous Question (source) |
| 2018-01-14 20:08:34 -0500 | received badge | ● Notable Question (source) |
| 2018-01-14 20:08:34 -0500 | received badge | ● Popular Question (source) |
| 2018-01-04 13:51:51 -0500 | received badge | ● Good Question (source) |
| 2017-08-14 10:09:10 -0500 | received badge | ● Editor (source) |
| 2017-08-14 10:09:10 -0500 | edited question | Moveit in nanopi M3 board not working. Moveit in nanopi M3 board not working. I have installed ubuntu 16.04(32-bit) provided by the official site of friendly a |
| 2017-08-14 10:08:30 -0500 | edited question | Moveit in nanopi M3 board not working. Moveit in nanopi M3 board not working. I have installed ubuntu 16.04 provided by the official site of friendly arm on Na |
| 2017-08-14 09:27:09 -0500 | asked a question | Moveit in nanopi M3 board not working. Moveit in nanopi M3 board not working. I have installed ubuntu 16.04 provided by the official site of friendly arm on Na |
| 2017-07-13 05:33:02 -0500 | marked best answer | ros_control and hardware interface. I am using diff_drive control package from ros_control.I have two dynamixel motors.How to register the motor with the hardware interface of ros_control and how to publish the velocity commands to dynamixel motor from diff_drive_controller I am a newbie.So please explain me with the code. |
| 2017-07-12 23:44:47 -0500 | received badge | ● Notable Question (source) |
| 2017-05-29 02:08:13 -0500 | received badge | ● Famous Question (source) |
| 2017-05-05 03:06:50 -0500 | received badge | ● Famous Question (source) |
| 2017-03-10 00:56:39 -0500 | received badge | ● Notable Question (source) |
| 2017-02-18 00:29:22 -0500 | received badge | ● Notable Question (source) |
| 2017-02-17 09:13:04 -0500 | received badge | ● Famous Question (source) |
| 2017-02-17 04:22:19 -0500 | received badge | ● Popular Question (source) |
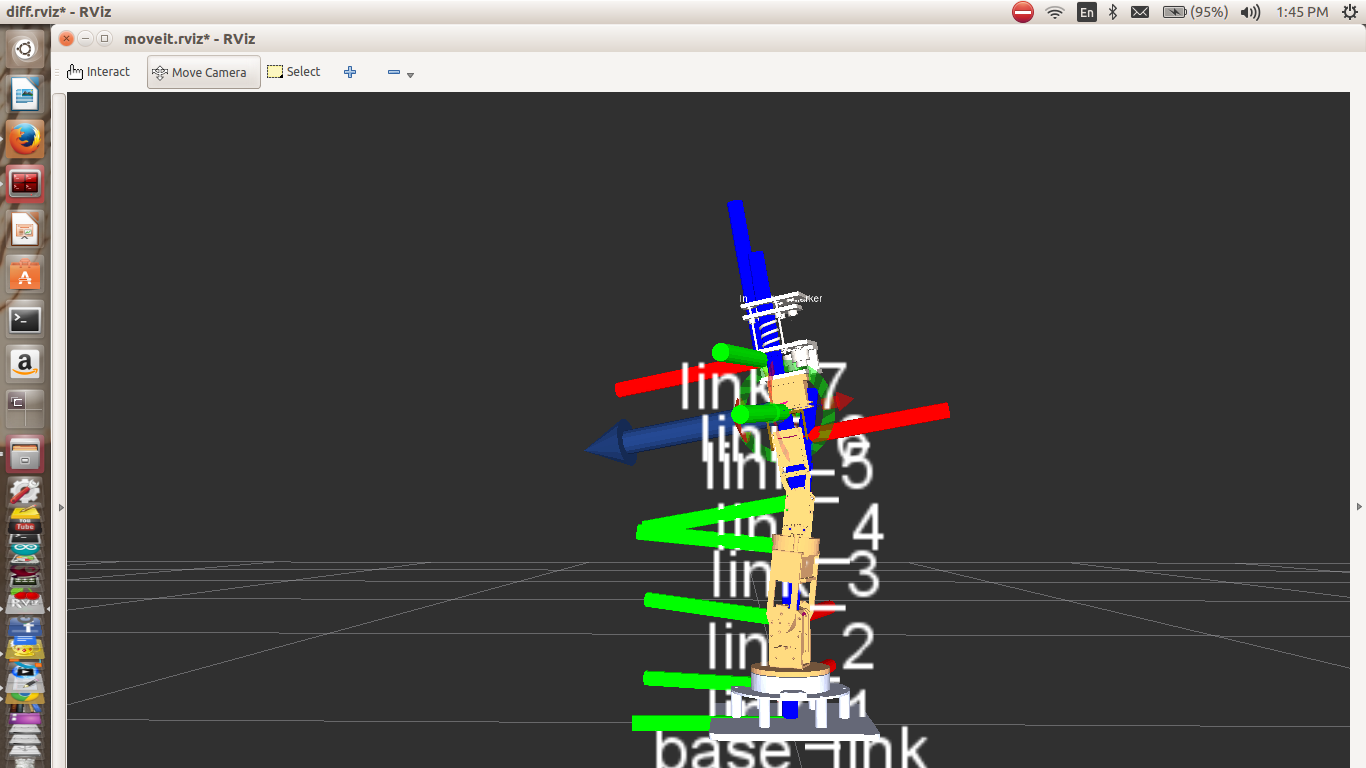
| 2017-02-16 23:20:02 -0500 | answered a question | How to change orientation of interactive marker of cartesian path planner? Explanation: I am explaining it as per my understanding. If it is wrong, please correct me. The arrow head in the interactive marker is always aligned with the x-axis of the last joint. But the last joint of my arm has the end effector attached to it along the z-axis(rotation axis). Since the arrow head always points the x-axis, the end effector and the arrowhead where not aligned. Solution: I opened the SolidWorks model of the arm and changed the coordinate system for the last joint having the rotational axis as the x-axis. Now the arrow head is aligned with the end effector because now it rotates along the x-axis. C:\fakepath\sol.png |
| 2017-02-16 02:18:46 -0500 | asked a question | How to change orientation of interactive marker of cartesian path planner? I have a 6DOF arm and I have configured move_it for the arm in indigo. I am using the cartesian path planner plugin to define waypoints for the arm. But the interactive marker from the plugin is not aligning with the end effector axis.
In this picture, you can see that the endeffector is facing upwards but the marker is not aligned with the axis of end effector. How to make the interactive marker point the correct axis? |
| 2017-02-14 07:52:52 -0500 | received badge | ● Nice Question (source) |
| 2017-02-14 07:52:05 -0500 | received badge | ● Popular Question (source) |
| 2017-02-13 00:38:24 -0500 | asked a question | How to execute smooth trajectory by defining waypoints in moveit? I am working on a 6 DOF robot arm for surgical operation. The endeffector is a cutting tool. The requirement is that the endeffector of the arm should follow a path defined by series of waypoints and the trajectory exection should be smooth and continuous. Steps done so far:
Result: The planner couldn't able execute the path completely and failed most of the times showing only less than 20% of path able to execute. But all the points defined are valid. Question: How to make the cartesian path planner execute the trajectory completely? Is cartesian path planner is the only way to define and execute a smooth trajectory? What are the other options to define a smooth trajectory for the arm? |
| 2016-12-23 23:59:41 -0500 | received badge | ● Popular Question (source) |
| 2016-12-22 05:26:08 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}