
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-04-12 10:06:52 -0500 | received badge | ● Famous Question (source) |
| 2020-06-30 04:46:52 -0500 | received badge | ● Famous Question (source) |
| 2020-06-30 04:46:52 -0500 | received badge | ● Notable Question (source) |
| 2020-06-30 04:46:52 -0500 | received badge | ● Popular Question (source) |
| 2018-12-10 12:15:19 -0500 | received badge | ● Famous Question (source) |
| 2018-08-26 22:48:21 -0500 | received badge | ● Famous Question (source) |
| 2017-11-15 08:53:15 -0500 | received badge | ● Notable Question (source) |
| 2017-11-15 08:53:15 -0500 | received badge | ● Popular Question (source) |
| 2017-06-11 07:19:44 -0500 | received badge | ● Famous Question (source) |
| 2017-05-11 04:57:42 -0500 | received badge | ● Famous Question (source) |
| 2017-05-11 04:57:42 -0500 | received badge | ● Notable Question (source) |
| 2017-04-20 15:12:58 -0500 | marked best answer | camera matrix differs from given example in ROS Hi everybody board size : 15 by 11 and square 70 mm or 0.007 m Could any body tell me that results is acceptable with this parameters. Best Taher |
| 2017-04-20 14:18:27 -0500 | marked best answer | Ubuntu 14.04.LTS problem with ROS Problem with Ubuntu 64 bits 14.04.LTS After using " sudo apt-get update && sudo apt-get install ros-electric-desktop-full or only using :sudo apt-get install ros-electric-desktop-full " I get error this. E: Unable to correct problems, you have held broken packages. I try to solve this problem by following these below command in Terminal: sudo apt-get upgrade sudo apt-get update sudo apt-get update --fix-missing But still I get same Error in Ubuntu 14.04.LTS system. Could any body give any helpful tips to get rid of this problem. |
| 2017-04-17 12:45:04 -0500 | received badge | ● Famous Question (source) |
| 2017-04-17 12:45:04 -0500 | received badge | ● Notable Question (source) |
| 2017-04-07 03:57:26 -0500 | marked best answer | Cmake_module_path not found After that,I add But still same error How to solve it? Would you any body give link. |
| 2016-09-05 14:56:08 -0500 | received badge | ● Famous Question (source) |
| 2016-09-05 14:56:08 -0500 | received badge | ● Notable Question (source) |
| 2016-08-19 07:15:43 -0500 | received badge | ● Popular Question (source) |
| 2016-08-19 07:15:43 -0500 | received badge | ● Popular Question (source) |
| 2016-08-18 15:08:20 -0500 | received badge | ● Famous Question (source) |
| 2016-07-25 11:28:01 -0500 | asked a question | How to transform Local camera frame to GPS or ENU coordinate Hi All I am using ROS_indigo for Tracking marker based camera poses.I Have camera poses 0.121479289178 -0.106297347731 1.62793653837 Thanks in advance. Best Taher |
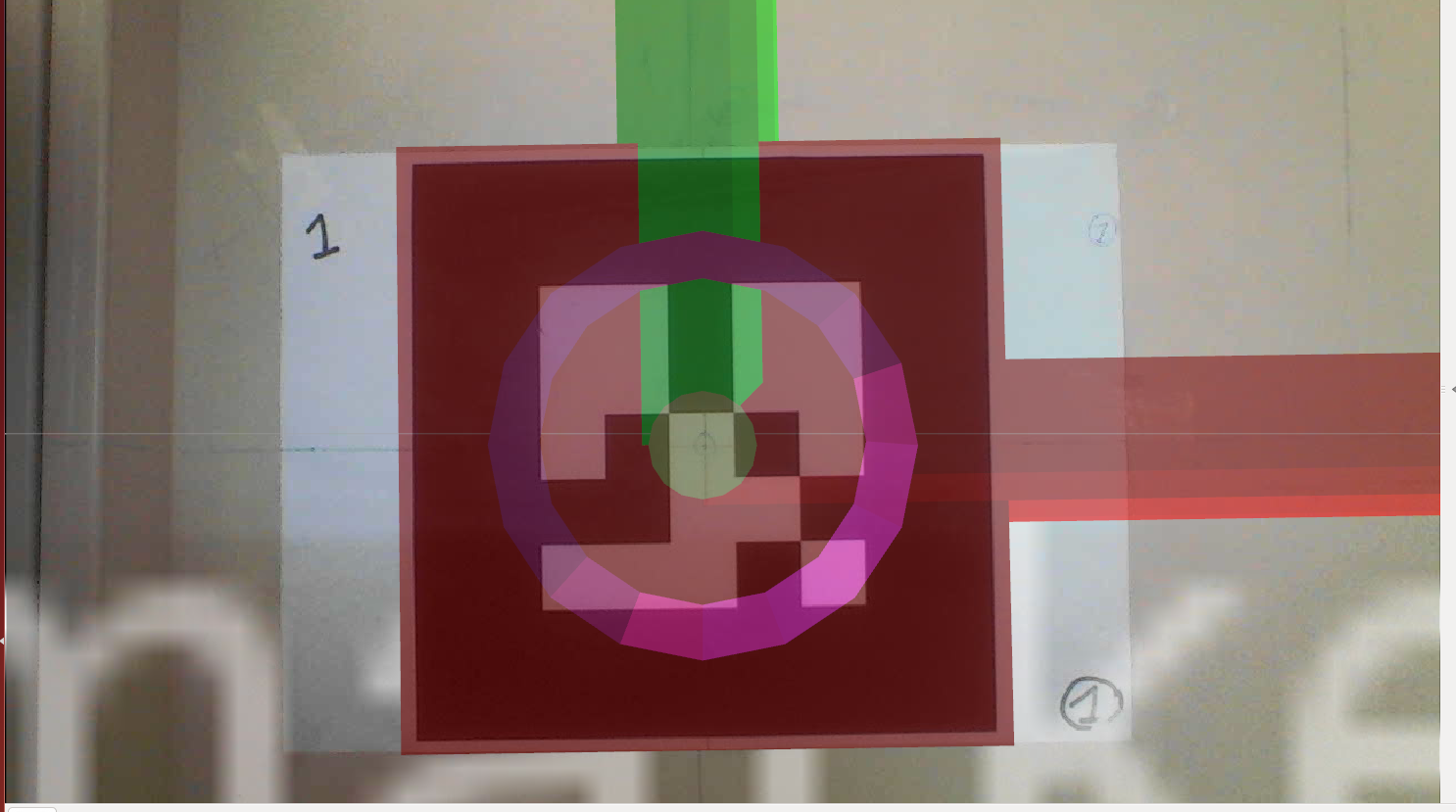
| 2016-07-19 05:42:22 -0500 | asked a question | Camera Pose realization Hi All I am Using ROS_indigo for Tracking marker based camera pose.I get TF values with given(in Rviz like I give fix frame marker_42,Ref Frame Marker _42) and I am getting my camera pose when moving my Camera.This works upto FOC of camera around 1 meter.I want to any body inform me how can I use this Rviz to track all markers while fixing may be 42. I am giving screen short. by fixing marker_42 as ( 0,0,0) position for camera ,I want to get position of my camera pose upto marker_17 .How Can I do that.I am using TF but that does not work. rosrun tf tf_echo /ar_marker_42 /camera.I get by using my configuration gives me 98 cm in x direction tracking as I am interest in x+ direction moving. How can I get Pose upto Marker_17.Could any body give any hinds. Thanks in advance. Best Taher |
| 2016-07-08 09:12:10 -0500 | received badge | ● Popular Question (source) |
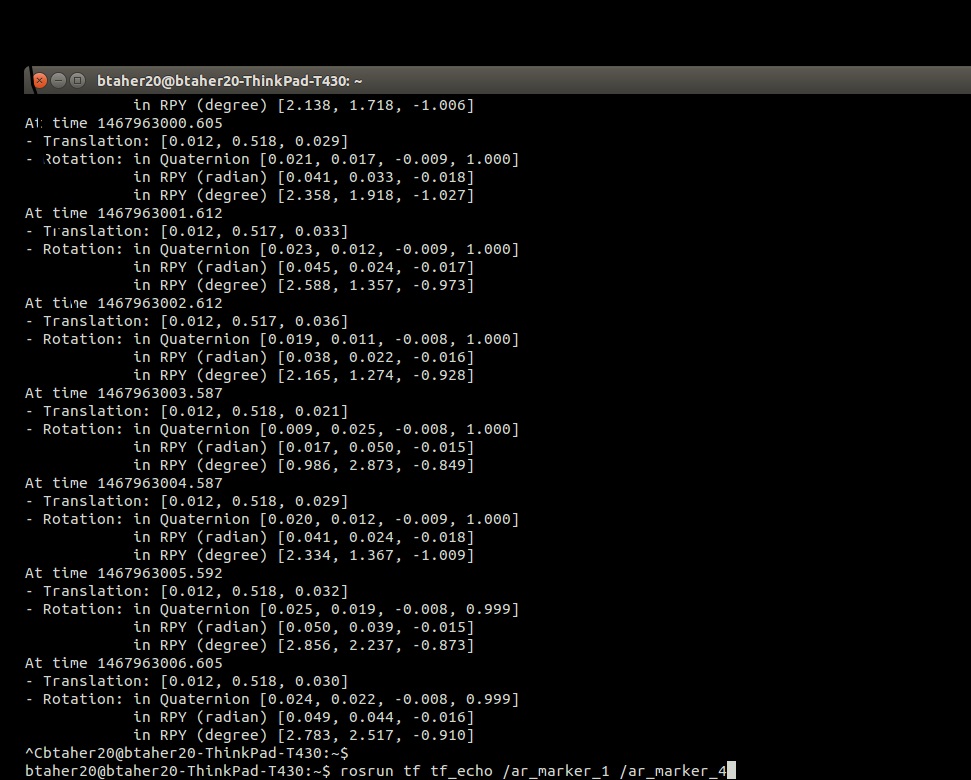
| 2016-07-08 05:21:10 -0500 | asked a question | rostopic echo /tf and rosrun tf tf_echo /ar_marker_9 /camera Hi everybody I am using ROS indigo for Marker detection and Transformation results in Camera farme.Screenshot from 2016-07-08 09_32_38.png I have two way to get values.But I do not know how to save my values in rostopic echo /tf results that I see in window : in text file second from this----- rosrun tf tf_echo /ar_marker_9 /camera, command I can save in text files but I get 30 same values(t same, same x,y,z) in one second.But I want one second one results that is clear in messege. wqw.jpg that I can see in my window but when I save it have differnt files I save with comamnd:rostopic echo -p /tf_echo /ar_marker_9 /camera > data.txt Could you any body tell me what is wrong here. Best Taher |
| 2016-07-07 09:04:33 -0500 | received badge | ● Notable Question (source) |
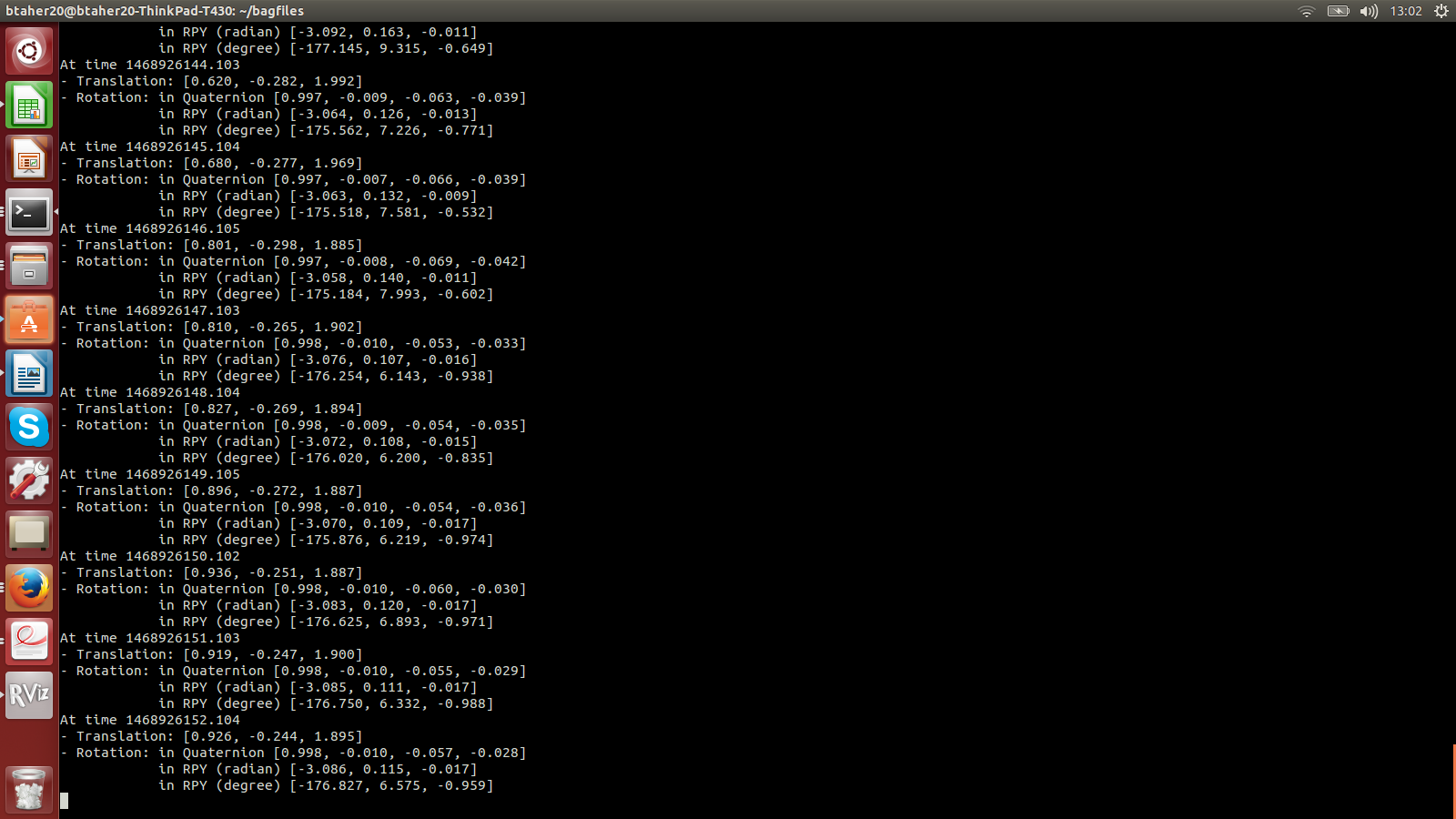
| 2016-07-05 05:03:53 -0500 | answered a question | Rviz data Saving format Hello I got Transformation+ Rotation results With rostopic Screenshot from 2016-07-05 11:51:10.png .But I want these results in a file or in text or any other format to use further. Best Taher |
| 2016-07-05 03:29:11 -0500 | received badge | ● Notable Question (source) |
| 2016-07-05 02:25:42 -0500 | answered a question | Rviz data Saving format Hello Janidu I used quite a long time where exactly I can find these option to solve this problem .Yes It will not be automatically saved Markers pose.I have to give command or time steps to save my Markers Pose I means How Can I do that. I carefully checked Rviz user manual and other options but did not find yet the way to save pose results in text file or any format. Would you mind to give link or any thing that I should maintain. I am using ROS Indigo. Best Taher |
| 2016-07-05 02:19:32 -0500 | received badge | ● Popular Question (source) |
| 2016-07-04 12:06:15 -0500 | asked a question | Rviz data Saving format Hi I would like to know how to save Rviz results in text file or any other format.Could any body give me feedback. Screenshot from 2016-06-24 11_44_20.png I want to save these x,y,z and alpha,beta,ghamma results as a text file. Could any body let me know how can I do that Best Edit: Hello Janidu I used quite a long time where exactly I can find these option to solve this problem .Yes It will not be automatically saved Markers pose.I have to give command or time steps to save my Markers Pose I means How Can I do that. I carefully checked Rviz user manual and other options but did not find yet the way to save pose results in text file or any format. Would you mind to give link or any thing that I should maintain. I am using ROS Indigo. |
| 2016-06-22 06:21:45 -0500 | received badge | ● Notable Question (source) |
| 2016-05-10 15:29:24 -0500 | received badge | ● Famous Question (source) |
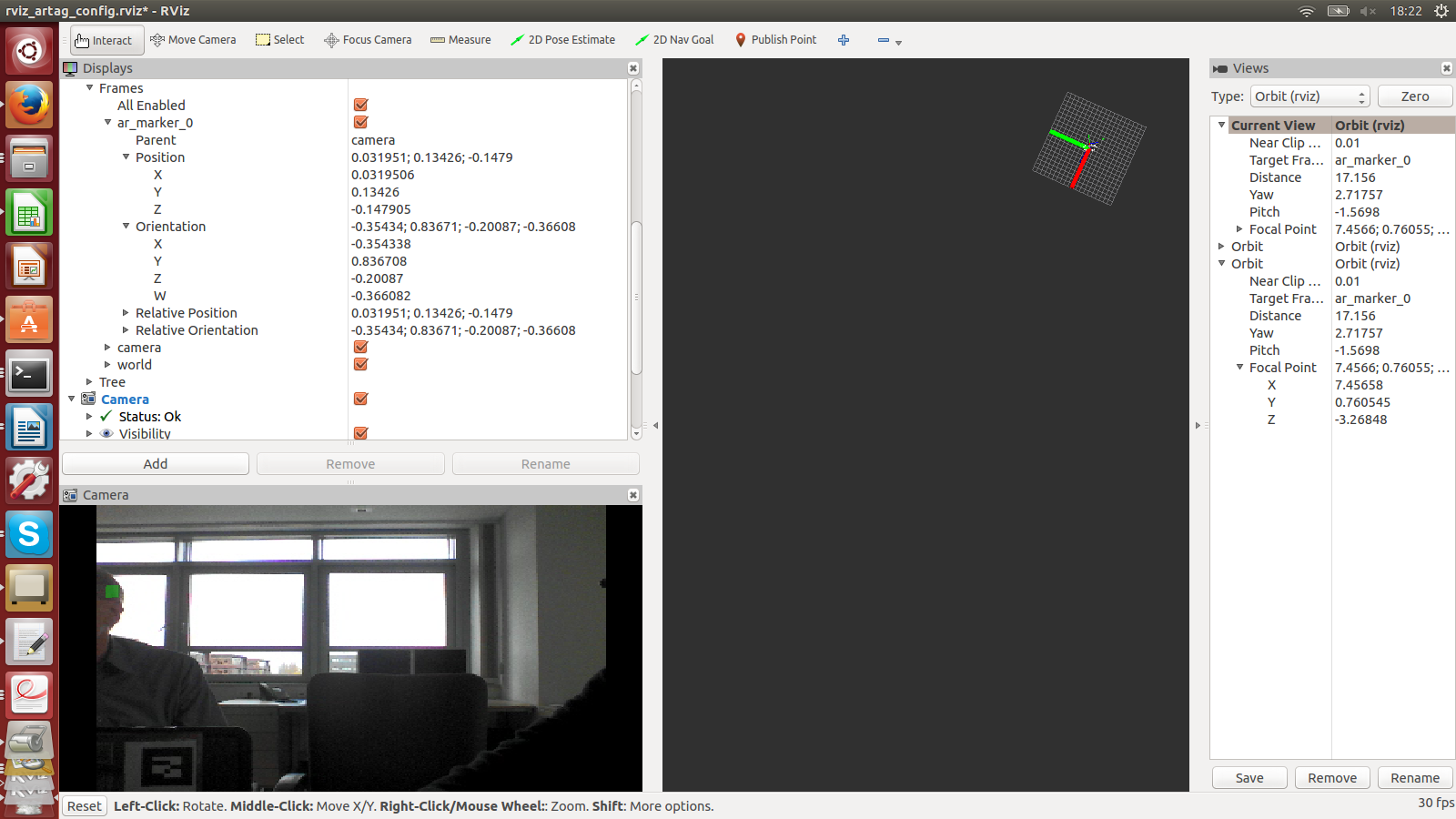
| 2016-04-13 12:26:59 -0500 | asked a question | Rviz Data using and savings for my application Hi everybody I am using ROS Indigo Package and using this site for ARtags detection https://github.com/astups/artag I got My Marker position detection and orientation
is there any user manual about full parameterization system of these 12 detected Screenshot from 2016-04-13 18:22:16.pngparameters value . My all parameter value just jumps,I need stable results for x,y,z values and How Can I get that. Would any body suggest me to do that.Thanks in Advance .Due to this problem I am confused about my results Best Taher |
| 2016-04-03 23:24:04 -0500 | received badge | ● Notable Question (source) |
| 2016-03-29 09:12:18 -0500 | received badge | ● Popular Question (source) |
| 2016-03-29 01:53:38 -0500 | received badge | ● Notable Question (source) |
| 2016-03-23 15:22:19 -0500 | edited question | camera statu warn,image status warn Hello everyone I am using Artags alvar but when I use command "rosrun rviz rviz -d rviz_artag_config.rviz" I get window but with Camera Status warn,Image status Warn no image captured by camera. I use camera usb logitech.Could you inform me what should I do now Thanks in advance Best Taher EDIT Hello I am using Logitech camera by But I get error in Camera Calibration Waiting for service', '//set_camera_info,Service not found. and now in visualizing the Ar_tags_alvar.I sucessfully build alvar and using ROS_indigo packages. Best Taher |
| 2016-03-21 06:41:28 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
 Markers-- parents
Relative position and Orientation with respect to Camera/ Markers .what is their Unit ?
Markers-- parents
Relative position and Orientation with respect to Camera/ Markers .what is their Unit ?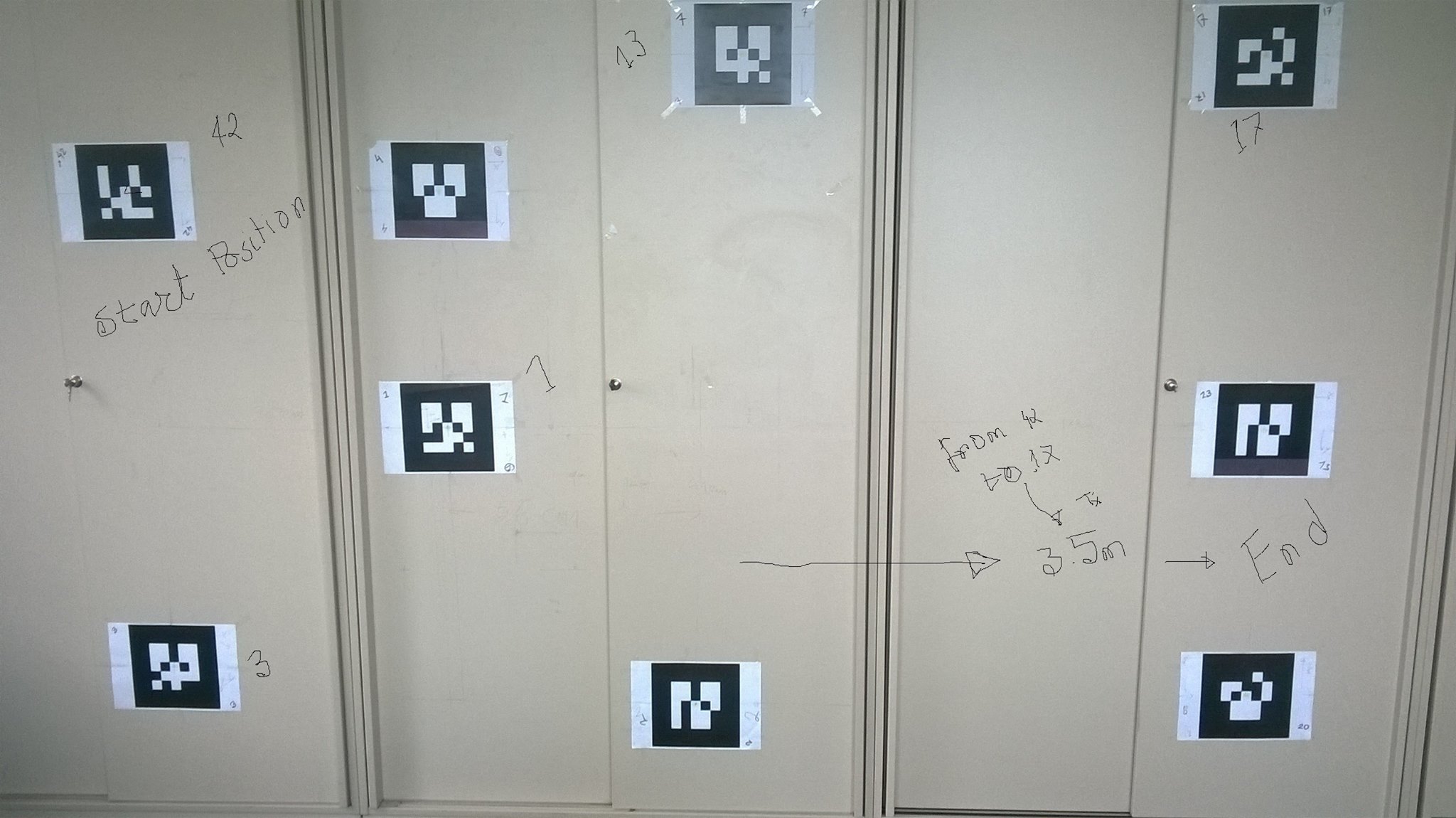{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}