| 2022-04-27 05:28:01 -0500 | received badge | ● Stellar Question
(source)
|
| 2020-03-23 19:46:03 -0500 | received badge | ● Favorite Question
(source)
|
| 2017-12-06 01:32:24 -0500 | received badge | ● Famous Question
(source)
|
| 2017-05-11 10:15:52 -0500 | received badge | ● Famous Question
(source)
|
| 2017-05-08 01:50:38 -0500 | received badge | ● Nice Question
(source)
|
| 2017-05-07 03:17:06 -0500 | received badge | ● Notable Question
(source)
|
| 2017-04-19 01:41:13 -0500 | received badge | ● Popular Question
(source)
|
| 2017-04-18 01:49:27 -0500 | asked a question | Using Cartographer as odometry with amcl for localization in a given map I wanted to exploit the fact that Cartographer gives pretty accurate position estimate. I used Cartographer just using IMU and laser to make an indoor map, and it pretty good. Then I want use Cartographer as odometry and amcl to do global localization in a pre-aquired map by Cartographer, but the robot drift away. On my robot a TF frame that looks like this:
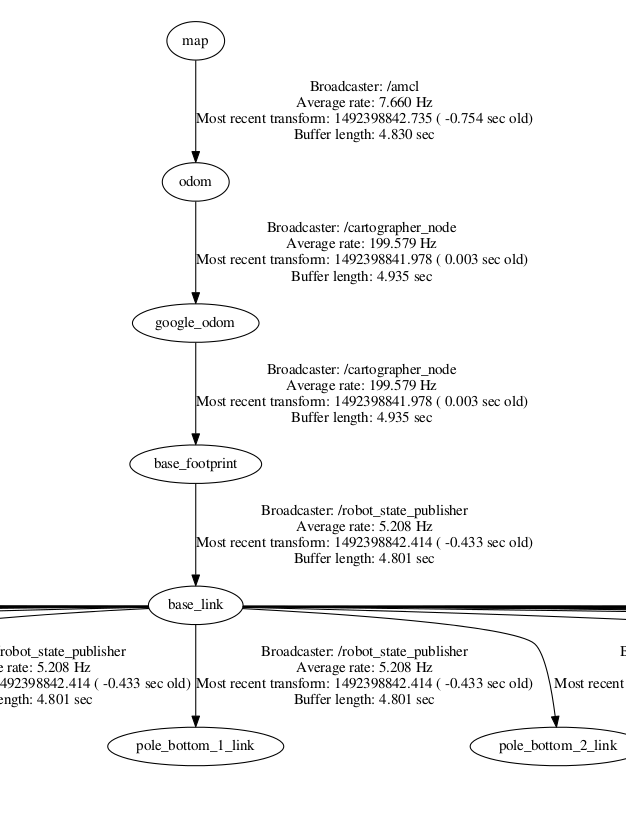 The configuration of Cartographer_ros is like: include "map_builder.lua"
options = {
map_builder = MAP_BUILDER,
map_frame = "odom",
tracking_frame = "gyro_link",
published_frame = "base_footprint",
odom_frame = "google_odom",
provide_odom_frame = true,
use_odometry = false,
use_laser_scan = true,
use_multi_echo_laser_scan = false,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.laser_min_range = 0.2
TRAJECTORY_BUILDER_2D.laser_max_range = 8.
TRAJECTORY_BUILDER_2D.laser_missing_echo_ray_length = 5.
TRAJECTORY_BUILDER_2D.use_imu_data = true
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1)
SPARSE_POSE_GRAPH.constraint_builder.min_score = 0.65
SPARSE_POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7
return options
I used the position estimate to find odometry and now Cartographer successful transform the required tf. But when I run amcl and publish an already created map using map_server, the pose of robot drift. It seems amcl doesn't work enven if the tf, map, laser_scan look like ok. And I also remap the Cartographer mapping map to something else . Please help how to resolve this issue. |
| 2017-03-30 04:08:47 -0500 | commented question | Using CH Robotics IMU UM7 with ROS @Naman @rob_tun, Hi, Naman and rob_tun, now I have the same problem while executing ros node. And my hardware interface is Serial2USB.could you tell me what do you solved your problem? |
| 2016-10-12 08:07:47 -0500 | received badge | ● Famous Question
(source)
|
| 2016-08-09 04:43:21 -0500 | answered a question | How to use LSD Slam with a USB Webcam Hi,I have the same problem with Cerin,but when I ran the launch file like Cerin's /webcam_lsd_slam.launch, it have some errors: core service [/rosout] found
ERROR: cannot launch node of type [usb_cam/usb_cam_node]: usb_cam
ROS path [0]=/opt/ros/indigo/share/ros
ROS path [1]=/home/zuo/ros_ws/lsd_slam/src
ROS path [2]=/home/zuo/ros_ws/ws_uav/src
ROS path [3]=/home/zuo/ros_ws/ws_ethzasl_ptam/src
ROS path [4]=/opt/ros/indigo/share
ROS path [5]=/opt/ros/indigo/stacks
process[usb_cam/to_mono_node1-2]: started with pid [21536]
ERROR: cannot launch node of type [image_view/image_view]: image_view
ROS path [0]=/opt/ros/indigo/share/ros
ROS path [1]=/home/zuo/ros_ws/lsd_slam/src
ROS path [2]=/home/zuo/ros_ws/ws_uav/src
ROS path [3]=/home/zuo/ros_ws/ws_ethzasl_ptam/src
ROS path [4]=/opt/ros/indigo/share
ROS path [5]=/opt/ros/indigo/stacks
[ERROR] [1470734987.261875629]: Skipping XML Document "/opt/ros/indigo/share/hector_pose_estimation hector_pose_estimation_nodelets.xml" which had no Root Element. This likely means the XML is malformed or missing.
and my workspace is like: ~/lsd_slam
src/
/lsd_slam
/lsd_slam
/lsd_slam_core
/lsd_slam_viewer
/lsd_slam_test
/launch
/webcam_lsd_slam.launch
Thank in advance! |
| 2016-08-09 04:32:13 -0500 | commented question | How to use LSD Slam with a USB Webcam Hi Cerin, I want to do the same things with you.I add a launch file which is the same with you.But when I ran it, there have some error. And I put it in the answers 4, plz give me some advise.
Thank you in advance! |
| 2016-08-02 22:22:59 -0500 | received badge | ● Famous Question
(source)
|
| 2016-08-02 22:22:59 -0500 | received badge | ● Notable Question
(source)
|
| 2016-08-02 22:22:59 -0500 | received badge | ● Popular Question
(source)
|
| 2016-07-25 06:46:06 -0500 | received badge | ● Citizen Patrol
(source)
|
| 2016-07-25 06:31:32 -0500 | asked a question | Timer and MultiThread Hi erveryone, I want to add some change in pr2_teleop/teleop_pr2_keyboard.cpp to add a front collision avoidance system in my UAV project.And then I have some questions:
1. I used ros::Timer to call keyboardLoop and subscribe a topic "/front_scan"(custom) to call a callback function RecieveCostmapCB to recieve UAV front costmap. //create keyboard Timer
ros::NodeHandle nh_;
ros::Timer keyboardTimer_;
keyboardTimer_ = nh_.createTimer(ros::Duration(0.05), &TeleopPR2Keyboard::keyboardLoop, &tpk);
keyboardTimer_.start();
But it can't step into RecieveCostmapCB until I press any key. As you know, that maybe can't step into RecieveCostmapCB when I press any key, but the result went counter to my hopes. So, why?
2. If I used ros::MultiThreadSpinner instead of ros::spin(), it will be OK! I know this is used MultiThread, but does ROS was so interlligence to do this?(I can't tell them what is belong to A thread and what is belong B thread. ros::MultiThreadedSpinner spinner(2);
spinner.spin();
void TeleopPR2Keyboard::init()
{
cmd.linear.x = cmd.linear.y = cmd.angular.z = 0;
StopCmd.linear.x = StopCmd.linear.y = StopCmd.angular.z = 0;
vel_pub_ = n_.advertise<geometry_msgs::Twist>("cmd_vel", 1);
sub_costmap = n_.subscribe("/front_scan", 1000, &TeleopPR2Keyboard::RecieveCostmapCB, this);
ros::NodeHandle n_private("~");
n_private.param("walk_vel", walk_vel, 0.5);
n_private.param("run_vel", run_vel, 1.0);
n_private.param("yaw_rate", yaw_rate, 1.0);
n_private.param("yaw_run_rate", yaw_rate_run, 1.5);
}
|
| 2016-07-04 03:31:22 -0500 | received badge | ● Famous Question
(source)
|
| 2016-06-08 03:13:46 -0500 | received badge | ● Famous Question
(source)
|
| 2016-05-31 18:59:29 -0500 | received badge | ● Notable Question
(source)
|
| 2016-05-16 10:52:34 -0500 | received badge | ● Student
(source)
|
| 2016-05-13 00:40:02 -0500 | commented answer | How to print values in SelfLocalizer.cpp in Nav2d Thanks you so much for sharing! |
| 2016-05-10 05:48:54 -0500 | received badge | ● Notable Question
(source)
|
| 2016-05-10 02:58:38 -0500 | received badge | ● Popular Question
(source)
|
| 2016-05-09 21:35:31 -0500 | commented answer | nav2d installation |
| 2016-05-09 20:55:58 -0500 | commented answer | How to run amcl_demo in gazebo+RViz? What's different on environment when use amcl_demo and gmapping in gazebo?And I'm so sorry for my english,hope you could understand.
hhhhhhhhhhLOL |
| 2016-05-09 20:53:30 -0500 | commented answer | How to run amcl_demo in gazebo+RViz? I have used roslaunch gmapping in gazebo by relative path,and it's right.I think it maybe something wrong in launch file or .bashrc file. |
| 2016-05-09 12:34:25 -0500 | received badge | ● Popular Question
(source)
|
| 2016-05-09 03:04:18 -0500 | received badge | ● Commentator
|
| 2016-05-09 03:04:18 -0500 | commented question | Nav2d with Turtlebot failing to create map Has your problem solved? I also have a similar problems that I couldn't receive a map after it roslaunch. |
| 2016-05-09 03:03:59 -0500 | commented answer | How to run amcl_demo in gazebo+RViz? I'm afraid it's not a path error.I try full path,but it also output next error info process has died [pid 24354, exit code 255
In any case, thanks for your time. |
| 2016-05-09 02:57:07 -0500 | commented question | How to recieve map using turtlebot and kinect I have commented out the 3 remappings in the launch file, but it still has no map. I really don't know where is the problem caused in this way, thank you for your answer |
| 2016-05-09 01:07:41 -0500 | commented question | How to recieve map using turtlebot and kinect /opt/ros/indigo/share/turtlebot_navigation/maps/willow-2010-02-18-0.10.yaml |
| 2016-05-08 22:55:42 -0500 | asked a question | How to recieve map using turtlebot and kinect Im trying to use nav2d package with turtlebot and kinect to map an unknown room. But I couldn't recieve /map from Mapper node. as you can see on my rqt_graph:
 tf frame:
 I can't use /StartMapping 3 and /StartExploration 2. These are the /map and the /Operator/local_map/costmap in RVIZ.
  It has costmap, but has no map. Here is my launch file: <launch>
<!-- Some general parameters -->
<param name="use_sim_time" value="false" />
<rosparam file="$(find nav2d_tutorials)/param/ros.yaml"/>
<arg name="world_file" default="$(env TURTLEBOT_GAZEBO_WORLD_FILE)"/>
<arg name="base" value="$(optenv TURTLEBOT_BASE kobuki)"/> <!--create, roomba -->
<arg name="battery" value="$(optenv TURTLEBOT_BATTERY /proc/acpi/battery/BAT0)"/> <!--/proc/acpi/battery/BAT0 -->
<arg name="gui" default="true"/>
<arg name="stacks" value="$(optenv TURTLEBOT_STACKS hexagons)"/> <!-- circles, hexagons -->
<arg name="3d_sensor" value="$(optenv TURTLEBOT_3D_SENSOR kinect)"/> <!-- kinect, asus_xtion_pro -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="use_sim_time" value="true"/>
<arg name="debug" value="false"/>
<arg name="gui" value="$(arg gui)" />
<arg name="world_name" value="$(arg world_file)"/>
</include>
<include file="$(find turtlebot_gazebo)/launch/includes/$(arg base).launch.xml">
<arg name="base" value="$(arg base)"/>
<arg name="stacks" value="$(arg stacks)"/>
<arg name="3d_sensor" value="$(arg 3d_sensor)"/>
</include>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="30.0" />
</node>
<!-- Fake laser -->
<node pkg="nodelet" type="nodelet" name="laserscan_nodelet_manager" args="manager"/>
<node pkg="nodelet" type="nodelet" name="depthimage_to_laserscan"
args="load depthimage_to_laserscan/DepthImageToLaserScanNodelet laserscan_nodelet_manager">
<param name="scan_height" value="10"/>
<param name="output_frame_id" value="/camera_depth_frame"/> <!-- /camera_depth_frame -->
<param name="range_min" value="0.45"/>
<remap from="image" to="/camera/depth/image_raw"/>
<remap from="scan" to="base_scan"/> <!-- <remap from="scan" to="base_scan"/> -->
</node>
<!-- Start the Operator to control the simulated robot -->
<node name="Operator" pkg="nav2d_operator" type="operator" >
<remap from="scan" to="base_scan"/>
<remap from="cmd_vel" to="cmd_vel_mux/input/teleop" />
<rosparam file="$(find nav2d_tutorials)/param/operator.yaml"/>
<rosparam file="$(find nav2d_tutorials)/param/costmap.yaml" ns="local_map" />
</node>
<!-- Start Mapper to genreate map from laser scans -->
<node name="Mapper" pkg="nav2d_karto" type="mapper">
<remap from="scan" to="base_scan"/>
<param name="base_frame" value="base_link"/>
<param name="odom_frame" value="odom"/>
<rosparam file="$(find nav2d_tutorials)/param/mapper.yaml"/>
</node>
<!-- Start the Navigator to move the robot autonomously -->
<node name="Navigator" pkg="nav2d_navigator" type="navigator">
<rosparam file="$(find nav2d_tutorials)/param/navigator.yaml"/>
</node>
<node name="GetMap" pkg="nav2d_navigator" type="get_map_client" />
<node name="Explore" pkg="nav2d_navigator" type="explore_client" />
<node name="SetGoal" pkg="nav2d_navigator" type="set_goal_client" />
<!-- RVIZ to view the visualization -->
<node name="RVIZ" pkg="rviz" type="rviz" args=" -d $(find nav2d_tutorials)/param/tutorial3.rviz" />
</launch>
ros.yaml: laser_frame: base_laser_link
robot_frame: base_link
odometry_frame: odom
offset_frame: offset
map_frame: map
map_topic: map
laser_topic: scan
map_service: static_map
costmap.yaml: global_frame: odom
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 1.0
publish_voxel_map: true
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.05
map_type: costmap
track_unknown_space: true
transform_tolerance: 0.3
obstacle_range: 4.0
min_obstacle_height: 0.0
max_obstacle_height: 2.0
raytrace_range: 4.5
robot_radius: 0.18 #turtlrbot radius
inflation_radius: 0.5 #origin 0.75
cost_scaling_factor: 2.0
lethal_cost_threshold: 100
observation_sources: scan
scan: {data_type: LaserScan, expected_update_rate: 0.4 ...
(more) |
| 2016-05-08 22:24:50 -0500 | received badge | ● Editor
(source)
|
| 2016-05-08 22:17:58 -0500 | asked a question | How to run amcl_demo in gazebo+RViz? Hi ,every one.
Now, I want to run amcl_demo in gazebo in my ROS(indigo + ubuntu14.04 + kinect1) roslaunch turtlebot_gazebo turtlebot_world.launch
roslaunch turtlebot_rviz_launchers view_navigation.launch
roslaunch turtlebot_gazebo amcl_demo.launch map_file:=database/test0.yaml
but after I ran roslaunch turtlebot_gazebo amcl_demo.launch map_file:=database/test0.yaml
the terminal output some error info: '[ERROR] [1462761356.977949263]: Map_server could not open database/test0.yaml.
[ INFO] [1462761357.305058954, 74.440000000]: No matching device found.... waiting for devices. Reason: std::string openni2_wrapper::OpenNI2Driver::resolveDeviceURI(const string&) @ /tmp/binarydeb/ros-indigo-openni2-camera- 0.2.5/src/openni2_driver.cpp @ 631 : Invalid device number 1, there are 0 devices connected.
[map_server-10] process has died [pid 11399, exit code 255, cmd /home/zuo/ros/ws/devel/lib/map_server/map_server database/test0.yaml __name:=map_server __log:=/home/zuo/.ros/log/94c0a0f6-158e-11e6-b559-005a39d84f79/map_server-10.log].
log file: /home/zuo/.ros/log/94c0a0f6-158e-11e6-b559-005a39d84f79/map_server-10*.log'
they said "No matching device found",but when I could ran gmapping in gazebo, it's OK! roslaunch turtlebot_gazebo turtlebot_world.launch
roslaunch turtlebot_rviz_launchers view_navigation.launch
roslaunch turtlebot_gazebo gmapping_demo.launch
So , what's problem with me?
Thanks for your help! |
| 2016-02-08 10:22:15 -0500 | marked best answer | Package "ompl" does not follow the version conventions. When I ran roslaunch turtlebot_bringup minimal.launch
there have WARNING: Package "ompl" does not follow the version conventions. It should not contain leading zeros (unless the number is 0).
And then I found RViz can't add RobotModel. SOS!
Thanks All! |

 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.